
Homework Answers
Add Answer to:
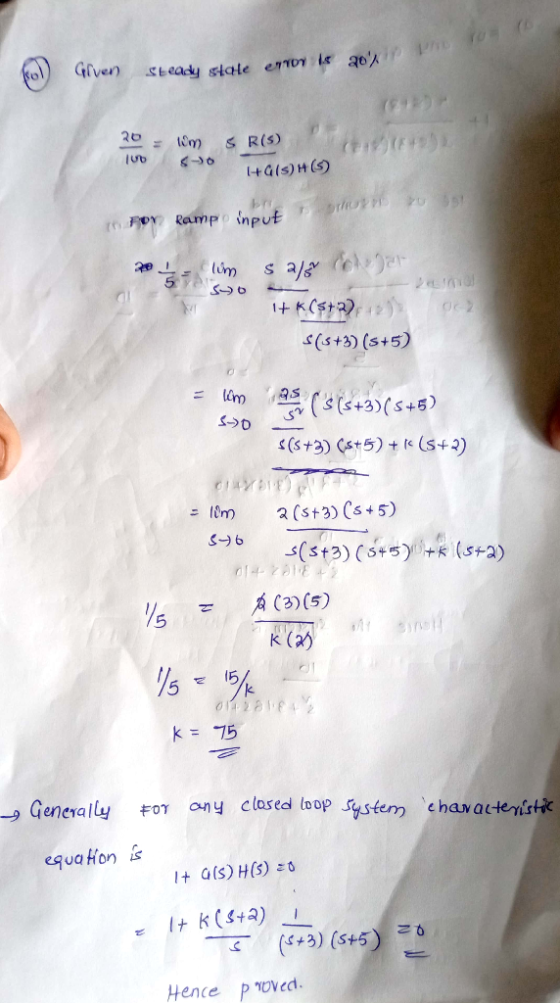
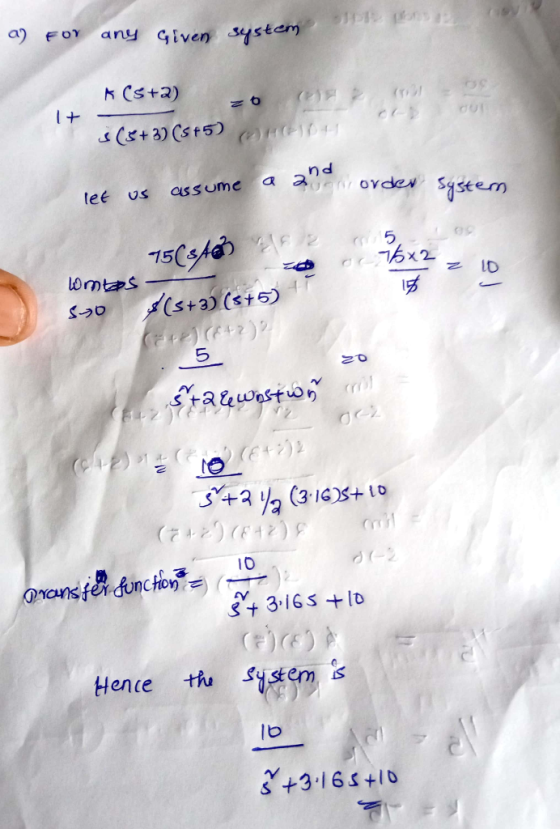
5.4 Consider the system with a required steady-state error of 20%, K(s + 2) s(s +3s + 5) and an a...
Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer fun...
 Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer function of V(s)/R(s) when Gc(s)-1 2) Derive the closed-loop transfer function of E(s)/R(s) when Ge(s)-1 3) Plot the time history of the error e(t) of the closed-loop system when r(t) is a unit step input. 4) Plot the root-loci of the uncompensated system (when Gc(s)-1). Mark the closed-loop complex poles on...
Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer function of V(s)/R(s) when Gc(s)-1 2) Derive the closed-loop transfer function of E(s)/R(s) when Ge(s)-1 3) Plot the time history of the error e(t) of the closed-loop system when r(t) is a unit step input. 4) Plot the root-loci of the uncompensated system (when Gc(s)-1). Mark the closed-loop complex poles on...
help Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine...
 help
Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine the closed-loop transfer function T(s) Y(s)/R(s). (b) Determine the steady-state error of the closed-loop system response to a unit ramp input, R(s) 1/s (c) Select a value for Ka so that the steady-state error of the system response to a unit step input, R(s)1/s, is zero.
help
Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine the closed-loop transfer function T(s) Y(s)/R(s). (b) Determine the steady-state error of the closed-loop system response to a unit ramp input, R(s) 1/s (c) Select a value for Ka so that the steady-state error of the system response to a unit step input, R(s)1/s, is zero.
could you please answer this question QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in...
 could you please answer this question
QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in canonical form. (b) (4 marks) Check the observability of the system. (c) 8 marks) Design a suitable full-order state observer for the system. Explain your choice of the observer's poles. d) (10 marks) Design a PI controller for the system so the output of the...
could you please answer this question
QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in canonical form. (b) (4 marks) Check the observability of the system. (c) 8 marks) Design a suitable full-order state observer for the system. Explain your choice of the observer's poles. d) (10 marks) Design a PI controller for the system so the output of the...
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the d...
 3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
Consider a unity feedback control architecture where P(s) = 1/s^2 and C(s) = K * ((s + z)/(s + p)...
 Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root lo...
 pls answer dont just copy other solution or ur catching a
dislike
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root locus for the closed-loop system (b). Using the angle condition, prove that s12 +j2 is not on the root locus. (c). Design a lead compensator Ge(s) - K such that the dominant closed-loop poles are located at s1--2 2. (d), What are the zero and pole of lead compensator G() (e)....
pls answer dont just copy other solution or ur catching a
dislike
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root locus for the closed-loop system (b). Using the angle condition, prove that s12 +j2 is not on the root locus. (c). Design a lead compensator Ge(s) - K such that the dominant closed-loop poles are located at s1--2 2. (d), What are the zero and pole of lead compensator G() (e)....
Given the following open loop plant: 48 G(s) s +2) (s+4)(s +6) (a) Design a state feedback contro...
 Need help with this problem asap, will rate it. Thank you.
Given the following open loop plant: 48 G(s) s +2) (s+4)(s +6) (a) Design a state feedback controller to yield a 20% overshoot and a settling time of 1 second (2%). Place the third pole 10 times farther from the imaginary axis than the dominant pole pair (b) Determine the pre-filter constant N needed to reduce the steady-state error to a unit step input for the closed-loop system. (c)...
Need help with this problem asap, will rate it. Thank you.
Given the following open loop plant: 48 G(s) s +2) (s+4)(s +6) (a) Design a state feedback controller to yield a 20% overshoot and a settling time of 1 second (2%). Place the third pole 10 times farther from the imaginary axis than the dominant pole pair (b) Determine the pre-filter constant N needed to reduce the steady-state error to a unit step input for the closed-loop system. (c)...
1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root...
 1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
Consider the sontrol system shown in the figure below: R(S) + E(s) C(s) K (s +...
 Consider the sontrol system shown in the figure below: R(S) + E(s) C(s) K (s + 4)(s + 6) g) Sketch the uncompensated system root locus showing all details. (5 Points) h) Find the dominant closed loop poles of the uncompensated system to operate with a 16.3% overshoot and peak time tp = 0.7255 (make sure to show this point on the Root Locus) (5 Points) (s+z) Now we want to design a PI compensator of the form to increase...
Consider the sontrol system shown in the figure below: R(S) + E(s) C(s) K (s + 4)(s + 6) g) Sketch the uncompensated system root locus showing all details. (5 Points) h) Find the dominant closed loop poles of the uncompensated system to operate with a 16.3% overshoot and peak time tp = 0.7255 (make sure to show this point on the Root Locus) (5 Points) (s+z) Now we want to design a PI compensator of the form to increase...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+2...
 Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
 Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer function of V(s)/R(s) when Gc(s)-1 2) Derive the closed-loop transfer function of E(s)/R(s) when Ge(s)-1 3) Plot the time history of the error e(t) of the closed-loop system when r(t) is a unit step input. 4) Plot the root-loci of the uncompensated system (when Gc(s)-1). Mark the closed-loop complex poles on...
Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer function of V(s)/R(s) when Gc(s)-1 2) Derive the closed-loop transfer function of E(s)/R(s) when Ge(s)-1 3) Plot the time history of the error e(t) of the closed-loop system when r(t) is a unit step input. 4) Plot the root-loci of the uncompensated system (when Gc(s)-1). Mark the closed-loop complex poles on...
 help
Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine the closed-loop transfer function T(s) Y(s)/R(s). (b) Determine the steady-state error of the closed-loop system response to a unit ramp input, R(s) 1/s (c) Select a value for Ka so that the steady-state error of the system response to a unit step input, R(s)1/s, is zero.
help
Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine the closed-loop transfer function T(s) Y(s)/R(s). (b) Determine the steady-state error of the closed-loop system response to a unit ramp input, R(s) 1/s (c) Select a value for Ka so that the steady-state error of the system response to a unit step input, R(s)1/s, is zero.
 could you please answer this question
QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in canonical form. (b) (4 marks) Check the observability of the system. (c) 8 marks) Design a suitable full-order state observer for the system. Explain your choice of the observer's poles. d) (10 marks) Design a PI controller for the system so the output of the...
could you please answer this question
QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in canonical form. (b) (4 marks) Check the observability of the system. (c) 8 marks) Design a suitable full-order state observer for the system. Explain your choice of the observer's poles. d) (10 marks) Design a PI controller for the system so the output of the...
 3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
 Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
 pls answer dont just copy other solution or ur catching a
dislike
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root locus for the closed-loop system (b). Using the angle condition, prove that s12 +j2 is not on the root locus. (c). Design a lead compensator Ge(s) - K such that the dominant closed-loop poles are located at s1--2 2. (d), What are the zero and pole of lead compensator G() (e)....
pls answer dont just copy other solution or ur catching a
dislike
Q. 1 (5 marks) For the system in Fig. (a). Assume proportion control, Gc(s)-K, sketch the root locus for the closed-loop system (b). Using the angle condition, prove that s12 +j2 is not on the root locus. (c). Design a lead compensator Ge(s) - K such that the dominant closed-loop poles are located at s1--2 2. (d), What are the zero and pole of lead compensator G() (e)....
 Need help with this problem asap, will rate it. Thank you.
Given the following open loop plant: 48 G(s) s +2) (s+4)(s +6) (a) Design a state feedback controller to yield a 20% overshoot and a settling time of 1 second (2%). Place the third pole 10 times farther from the imaginary axis than the dominant pole pair (b) Determine the pre-filter constant N needed to reduce the steady-state error to a unit step input for the closed-loop system. (c)...
Need help with this problem asap, will rate it. Thank you.
Given the following open loop plant: 48 G(s) s +2) (s+4)(s +6) (a) Design a state feedback controller to yield a 20% overshoot and a settling time of 1 second (2%). Place the third pole 10 times farther from the imaginary axis than the dominant pole pair (b) Determine the pre-filter constant N needed to reduce the steady-state error to a unit step input for the closed-loop system. (c)...
 1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
 Consider the sontrol system shown in the figure below: R(S) + E(s) C(s) K (s + 4)(s + 6) g) Sketch the uncompensated system root locus showing all details. (5 Points) h) Find the dominant closed loop poles of the uncompensated system to operate with a 16.3% overshoot and peak time tp = 0.7255 (make sure to show this point on the Root Locus) (5 Points) (s+z) Now we want to design a PI compensator of the form to increase...
Consider the sontrol system shown in the figure below: R(S) + E(s) C(s) K (s + 4)(s + 6) g) Sketch the uncompensated system root locus showing all details. (5 Points) h) Find the dominant closed loop poles of the uncompensated system to operate with a 16.3% overshoot and peak time tp = 0.7255 (make sure to show this point on the Root Locus) (5 Points) (s+z) Now we want to design a PI compensator of the form to increase...
 Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
Most questions answered within 3 hours.
-
The following information pertains to a weekly payroll of Texera
Tile Company:
a. The total wages...
asked 45 seconds ago -
Alice has the RSA public key (n, e) = (11413, 251) and private
key d =...
asked 13 minutes ago -
QUESTION 5
A drug or medicine can reach the brain more effectively by
placing the drug...
asked 17 minutes ago -
Developmental biology
A mouse contains a mutation that results in a failure of their
long
bones...
asked 13 minutes ago -
Rammazzotti, Inc., is looking for feedback on company
performance. The company compares the budget for the...
asked 18 minutes ago -
A manufacturer of chocolate chips would like to know whether its
bag filling machine works correctly...
asked 27 minutes ago -
Consider the student registration business process at
your college:
1.)Describe the steps necessary for you to...
asked 34 minutes ago -
when released from rest at point A, an unknown ion moves to
point B. At point...
asked 26 minutes ago -
A stock is expected to pay the following dividends: $1.1
four years from now, $1.4 five...
asked 31 minutes ago -
G=yellow and g=green pea seeds. You cross a heterozygous
yellow-seeded plant with a green-seeded plant to...
asked 34 minutes ago -
Current Balance Experiment
a) When there is no current flowing through the electromagnet
coil, is there...
asked 32 minutes ago -
In Visual Basic 2017, Write a complete Main method that prints
Hello, world to the screen....
asked 49 minutes ago