USING MATLAB TO SOLVE THIS PROBLEM -

Figure Above ----------------------------------------------------------------------
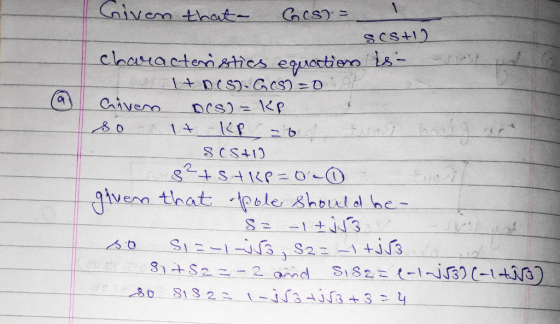
26. A numerically controlled machine tool positioning servomechanism has a normalized and scaled transfer function given by S(s+1 Performance specifications of the system in the unity feedback configu ration of Fig. 5.60 are satisfied if the closed-loop poles are located at (a) Show that this specification cannot be achieved by choosing propor tional control alone, D(s) = a lead compensator D)- that will s + p fication
Homework Answers

Add Answer to:
USING MATLAB TO SOLVE THIS PROBLEM - Figure Above ---------------------------------------------------------------------...
1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root...
 1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
SOLVE USING MATLAB A servomechanism position control has the plant transfer function 10 s(s +1) (s 10) You are to desig...
 SOLVE USING MATLAB
A servomechanism position control has the plant transfer function 10 s(s +1) (s 10) You are to design a series compensation transfer function D(s) in the unity feedback configuration to meet the following closed-loop specifications: . The response to a reference step input is to have no more than 16% overshoot. . The response to a reference step input is to have a rise time of no more than 0.4 sec. The steady-state error to a unit...
SOLVE USING MATLAB
A servomechanism position control has the plant transfer function 10 s(s +1) (s 10) You are to design a series compensation transfer function D(s) in the unity feedback configuration to meet the following closed-loop specifications: . The response to a reference step input is to have no more than 16% overshoot. . The response to a reference step input is to have a rise time of no more than 0.4 sec. The steady-state error to a unit...
summatize the following info and break them into differeng key points. write them in yojr own...
 summatize the following info and break them into differeng key points. write them in yojr own words
apartus
6.1 Introduction—The design of a successful hot box appa- ratus is influenced by many factors. Before beginning the design of an apparatus meeting this standard, the designer shall review the discussion on the limitations and accuracy, Section 13, discussions of the energy flows in a hot box, Annex A2, the metering box wall loss flow, Annex A3, and flanking loss, Annex...
summatize the following info and break them into differeng key points. write them in yojr own words
apartus
6.1 Introduction—The design of a successful hot box appa- ratus is influenced by many factors. Before beginning the design of an apparatus meeting this standard, the designer shall review the discussion on the limitations and accuracy, Section 13, discussions of the energy flows in a hot box, Annex A2, the metering box wall loss flow, Annex A3, and flanking loss, Annex...
 1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
 SOLVE USING MATLAB
A servomechanism position control has the plant transfer function 10 s(s +1) (s 10) You are to design a series compensation transfer function D(s) in the unity feedback configuration to meet the following closed-loop specifications: . The response to a reference step input is to have no more than 16% overshoot. . The response to a reference step input is to have a rise time of no more than 0.4 sec. The steady-state error to a unit...
SOLVE USING MATLAB
A servomechanism position control has the plant transfer function 10 s(s +1) (s 10) You are to design a series compensation transfer function D(s) in the unity feedback configuration to meet the following closed-loop specifications: . The response to a reference step input is to have no more than 16% overshoot. . The response to a reference step input is to have a rise time of no more than 0.4 sec. The steady-state error to a unit...
 summatize the following info and break them into differeng key points. write them in yojr own words
apartus
6.1 Introduction—The design of a successful hot box appa- ratus is influenced by many factors. Before beginning the design of an apparatus meeting this standard, the designer shall review the discussion on the limitations and accuracy, Section 13, discussions of the energy flows in a hot box, Annex A2, the metering box wall loss flow, Annex A3, and flanking loss, Annex...
summatize the following info and break them into differeng key points. write them in yojr own words
apartus
6.1 Introduction—The design of a successful hot box appa- ratus is influenced by many factors. Before beginning the design of an apparatus meeting this standard, the designer shall review the discussion on the limitations and accuracy, Section 13, discussions of the energy flows in a hot box, Annex A2, the metering box wall loss flow, Annex A3, and flanking loss, Annex...
Most questions answered within 3 hours.
-
A nationwide survey found that 64% of people in the
Kingdom like Berger. If 3 people...
asked 2 minutes ago -
CYTOGENETIC MAPS VS LINKAGE MAPS
how do you read and extract information from cytogenetic and
linkage...
asked 4 minutes ago -
What volume of a 0.251 M perchloric
acid solution is required to neutralize
14.6 mL of...
asked 4 minutes ago -
Amplitude=3;
fs=8000;
n=0:399;
t=0:1/fs: n*1/fs-1/fs;
signal=3+3*cos(2*pi*1100*t)+3*cos(2*pi*2200*t)+3*cos(2*pi*3300*t);
fftSignal= fft(signal);
fftSignal=f ftshift (fftSignal);
f=fs/2*linspace(-1,1,fs);
plot(f,abs(fftsignal);
xlabel('Frequency(Hz)’)
yla
asked 5 minutes ago -
Write a method called removeDuplicates that
accepts a PriorityQueue of integers as a parameter
and modifies...
asked 7 minutes ago -
What is the wavelength, in cm, of a microwave having a frequency
of 3.44 x 10^9...
asked 24 minutes ago -
A new business venture must develop a comprehensive business
plan to borrow money to get started....
asked 26 minutes ago -
Madtack Company uses a job-order costing system and started the month
of March with only one...
asked 28 minutes ago -
Describe how to distinguish true motility from brownian motion
and fluid flow when viewing a wet...
asked 32 minutes ago -
A manufacturer of game controllers is concerned that its
controller may be difficult for left-handed users....
asked 34 minutes ago -
Water at gauge pressure of 3.8 atmospheres at street level
enters an office building at 0.60...
asked 48 minutes ago -
Quick question, I want to know how to convert decimal numbers to
binary number, when i...
asked 1 hour ago