
Homework Answers
Please find below the complete solution.



Add Answer to:
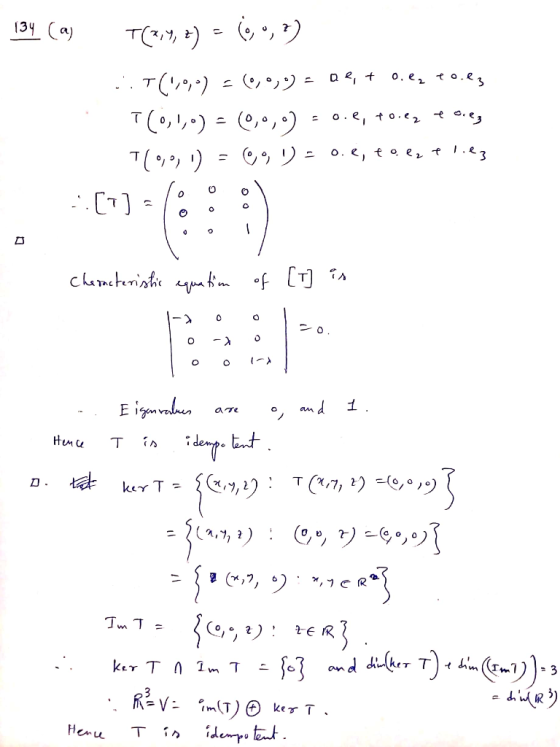
a,b and c,completed processes 134. Idempotent Transformations. Find the matrices of the transformations T which or...
correct answers 135. Computer Graphics. One of the most important applications of linear transformations is...
 correct answers
135. Computer Graphics. One of the most important applications of linear transformations is computer graphics where we wish to view 3-dimensional objects (for example a crystal) on a 2-dimensional screen. The screen is the ry-plane. The aim is to rotate the crystal and orthogonally project it onto the ry-plane to obtain different views of it. We consider 3 possible rotations: 0 . A rotation of θ round the x-axis using the matrix R2-10 cos θ -sin θ cos...
correct answers
135. Computer Graphics. One of the most important applications of linear transformations is computer graphics where we wish to view 3-dimensional objects (for example a crystal) on a 2-dimensional screen. The screen is the ry-plane. The aim is to rotate the crystal and orthogonally project it onto the ry-plane to obtain different views of it. We consider 3 possible rotations: 0 . A rotation of θ round the x-axis using the matrix R2-10 cos θ -sin θ cos...
(a) Let T: R2 + R2 be counter clockwise rotation by 7/3, i.e. T(x) is the...
 (a) Let T: R2 + R2 be counter clockwise rotation by 7/3, i.e. T(x) is the vector obtained by rotating x counter clockwise by 7/3 around 0. Without computing any matrices, what would you expect det (T) to be? (Does T make areas larger or smaller?) Now check your answer by using the fact that the matrix for counter clockwise rotation by is cos(0) - sin(0)] A A= sin(0) cos(0) (b) Same question as (a), only this time let T...
(a) Let T: R2 + R2 be counter clockwise rotation by 7/3, i.e. T(x) is the vector obtained by rotating x counter clockwise by 7/3 around 0. Without computing any matrices, what would you expect det (T) to be? (Does T make areas larger or smaller?) Now check your answer by using the fact that the matrix for counter clockwise rotation by is cos(0) - sin(0)] A A= sin(0) cos(0) (b) Same question as (a), only this time let T...
QUESTION 4 Let T R3-P2 be defined by T(a, b, c) - (a + b + e) +(a+b)a2 (4.1) Show that T is a linear transformation (4.2) Fınd the matrix representation [T]s, B, of T relative to the basıs in R3 and...
 QUESTION 4 Let T R3-P2 be defined by T(a, b, c) - (a + b + e) +(a+b)a2 (4.1) Show that T is a linear transformation (4.2) Fınd the matrix representation [T]s, B, of T relative to the basıs in R3 and the basis in P2, ordered from left to right Determine the range R(T of T Is T onto? In other words, is it true that R(T)P2 Let x, y E R3 Show that x-y ker(T) f and only...
QUESTION 4 Let T R3-P2 be defined by T(a, b, c) - (a + b + e) +(a+b)a2 (4.1) Show that T is a linear transformation (4.2) Fınd the matrix representation [T]s, B, of T relative to the basıs in R3 and the basis in P2, ordered from left to right Determine the range R(T of T Is T onto? In other words, is it true that R(T)P2 Let x, y E R3 Show that x-y ker(T) f and only...
In the following transformations: a)Find the Kernel and Image b)Find dimK(T) and dimI(T) and show that...
 In the following transformations:
a)Find the Kernel and Image
b)Find dimK(T) and dimI(T) and show that
dimK(T)+dimi(T)=dimV
c)say if the transformations are injective, suprajective or
bijective
i)
such that:
ii),
such that:
iii)
, such that:
T:R? → R Tx,y,z) = (x - y, 22) T: M2:3 (R) → M2.2(R) SZD LED TEDT SID ZID IIDL sip-sip tip-tip) = T: P2(R) + P(R) T(p2)) = rp() +p (2)
In the following transformations:
a)Find the Kernel and Image
b)Find dimK(T) and dimI(T) and show that
dimK(T)+dimi(T)=dimV
c)say if the transformations are injective, suprajective or
bijective
i)
such that:
ii),
such that:
iii)
, such that:
T:R? → R Tx,y,z) = (x - y, 22) T: M2:3 (R) → M2.2(R) SZD LED TEDT SID ZID IIDL sip-sip tip-tip) = T: P2(R) + P(R) T(p2)) = rp() +p (2)
A unit cube as shown in Figure Q1 is undergoing the transformations described in (i) and...
 A unit cube as shown in Figure Q1 is undergoing the transformations described in (i) and (ii) respectively. Sketch the resultant object with coordinates of each vertex after each transformation. (a) Z (0,1,1) (1,1,1) (0,0,1) (1,0,1) (0,0,0) (1,1,0) (1,0,0) Figure Q1 Transformation (i) (6 marks) 1. A Uniform scale by a factor of 2 2. Followed by a rotation about the-axis in counter-clockwise direction by 90 degrees 3. Followed by a transformation moving in the direction of < 2, 1,...
A unit cube as shown in Figure Q1 is undergoing the transformations described in (i) and (ii) respectively. Sketch the resultant object with coordinates of each vertex after each transformation. (a) Z (0,1,1) (1,1,1) (0,0,1) (1,0,1) (0,0,0) (1,1,0) (1,0,0) Figure Q1 Transformation (i) (6 marks) 1. A Uniform scale by a factor of 2 2. Followed by a rotation about the-axis in counter-clockwise direction by 90 degrees 3. Followed by a transformation moving in the direction of < 2, 1,...
Let T. R3 R3 be a linear transformation. Use the given information to find the nullity...
 Let T. R3 R3 be a linear transformation. Use the given information to find the nullity of T. rank(7) - 1 nullity(T) - Give a geometric description of the kernel and range of T. The kernel of T is a plane, and the range of T is a line. o The kernel of T is all of R3, and the range of T is all of R. The kernel of T is the single point {(0, 0, 0)), and the...
Let T. R3 R3 be a linear transformation. Use the given information to find the nullity of T. rank(7) - 1 nullity(T) - Give a geometric description of the kernel and range of T. The kernel of T is a plane, and the range of T is a line. o The kernel of T is all of R3, and the range of T is all of R. The kernel of T is the single point {(0, 0, 0)), and the...
linear algebra Remember we were able to express rotations and reflections, which are geometric transformations, using...
 linear algebra
Remember we were able to express rotations and reflections, which are geometric transformations, using a linear transformation T, the coef- ficient matrix corresponding to the geometric transformation (r. y) (r', ) (a) What problem do you encounter with translations (r. y) (r+ h.y+k)? To handle this problem, We let the vector (x, y1 ) in R2 correspond to the vector (x1, y1, 1), and conversely. (In effect, we're projecting the :xy-plane onto the plane 1) introduce homogeneous coordinates....
linear algebra
Remember we were able to express rotations and reflections, which are geometric transformations, using a linear transformation T, the coef- ficient matrix corresponding to the geometric transformation (r. y) (r', ) (a) What problem do you encounter with translations (r. y) (r+ h.y+k)? To handle this problem, We let the vector (x, y1 ) in R2 correspond to the vector (x1, y1, 1), and conversely. (In effect, we're projecting the :xy-plane onto the plane 1) introduce homogeneous coordinates....
9. For each of the following, provide a suitable example, or else explain why no such...
 9. For each of the following, provide a suitable example, or else explain why no such example exists. [2 marks each]. a) A function f : C+C that is differentiable only on the line y = x. b) A function f :C+C that is analytic only on the line y = x. c) A non-constant, bounded, analytic function f with domain A = {z | Re(z) > 0} (i.e., the right half-plane). d) A Möbius transformation mapping the real axis...
9. For each of the following, provide a suitable example, or else explain why no such example exists. [2 marks each]. a) A function f : C+C that is differentiable only on the line y = x. b) A function f :C+C that is analytic only on the line y = x. c) A non-constant, bounded, analytic function f with domain A = {z | Re(z) > 0} (i.e., the right half-plane). d) A Möbius transformation mapping the real axis...
ame 5. (20 points) Suppose SRR and TRR2 are linear transformations given by (o) Find the...
 ame 5. (20 points) Suppose SRR and TRR2 are linear transformations given by (o) Find the standard matrix for S (asuming the standard basis for R3 and for R2) (b) Find the standard matrix for T (assuming the standard basis for IR2 and for R). (c) Show that S and T are invertible. (d) Show that T is the inverse of S (e) What is the standard matrix for T (S (x)) ToS(),where z e R27
ame 5. (20 points) Suppose SRR and TRR2 are linear transformations given by (o) Find the standard matrix for S (asuming the standard basis for R3 and for R2) (b) Find the standard matrix for T (assuming the standard basis for IR2 and for R). (c) Show that S and T are invertible. (d) Show that T is the inverse of S (e) What is the standard matrix for T (S (x)) ToS(),where z e R27
2. Consider the following transformations of R2 Tİ (z, y) (-r, y), T3(x, y) (z, _y), T,(zw) (y, x). Show that, for any j 1,2,3, a subset A C R2 is a Jordan region if and only if T,(A) is a Jordan...
 2. Consider the following transformations of R2 Tİ (z, y) (-r, y), T3(x, y) (z, _y), T,(zw) (y, x). Show that, for any j 1,2,3, a subset A C R2 is a Jordan region if and only if T,(A) is a Jordan region. What is the relation between the volumes of A and T, (A)?
2. Consider the following transformations of R2 Tİ (z, y) (-r, y), T3(x, y) (z, _y), T,(zw) (y, x). Show that, for any j 1,2,3,...
2. Consider the following transformations of R2 Tİ (z, y) (-r, y), T3(x, y) (z, _y), T,(zw) (y, x). Show that, for any j 1,2,3, a subset A C R2 is a Jordan region if and only if T,(A) is a Jordan region. What is the relation between the volumes of A and T, (A)?
2. Consider the following transformations of R2 Tİ (z, y) (-r, y), T3(x, y) (z, _y), T,(zw) (y, x). Show that, for any j 1,2,3,...
 correct answers
135. Computer Graphics. One of the most important applications of linear transformations is computer graphics where we wish to view 3-dimensional objects (for example a crystal) on a 2-dimensional screen. The screen is the ry-plane. The aim is to rotate the crystal and orthogonally project it onto the ry-plane to obtain different views of it. We consider 3 possible rotations: 0 . A rotation of θ round the x-axis using the matrix R2-10 cos θ -sin θ cos...
correct answers
135. Computer Graphics. One of the most important applications of linear transformations is computer graphics where we wish to view 3-dimensional objects (for example a crystal) on a 2-dimensional screen. The screen is the ry-plane. The aim is to rotate the crystal and orthogonally project it onto the ry-plane to obtain different views of it. We consider 3 possible rotations: 0 . A rotation of θ round the x-axis using the matrix R2-10 cos θ -sin θ cos...
 (a) Let T: R2 + R2 be counter clockwise rotation by 7/3, i.e. T(x) is the vector obtained by rotating x counter clockwise by 7/3 around 0. Without computing any matrices, what would you expect det (T) to be? (Does T make areas larger or smaller?) Now check your answer by using the fact that the matrix for counter clockwise rotation by is cos(0) - sin(0)] A A= sin(0) cos(0) (b) Same question as (a), only this time let T...
(a) Let T: R2 + R2 be counter clockwise rotation by 7/3, i.e. T(x) is the vector obtained by rotating x counter clockwise by 7/3 around 0. Without computing any matrices, what would you expect det (T) to be? (Does T make areas larger or smaller?) Now check your answer by using the fact that the matrix for counter clockwise rotation by is cos(0) - sin(0)] A A= sin(0) cos(0) (b) Same question as (a), only this time let T...
 QUESTION 4 Let T R3-P2 be defined by T(a, b, c) - (a + b + e) +(a+b)a2 (4.1) Show that T is a linear transformation (4.2) Fınd the matrix representation [T]s, B, of T relative to the basıs in R3 and the basis in P2, ordered from left to right Determine the range R(T of T Is T onto? In other words, is it true that R(T)P2 Let x, y E R3 Show that x-y ker(T) f and only...
QUESTION 4 Let T R3-P2 be defined by T(a, b, c) - (a + b + e) +(a+b)a2 (4.1) Show that T is a linear transformation (4.2) Fınd the matrix representation [T]s, B, of T relative to the basıs in R3 and the basis in P2, ordered from left to right Determine the range R(T of T Is T onto? In other words, is it true that R(T)P2 Let x, y E R3 Show that x-y ker(T) f and only...
 In the following transformations:
a)Find the Kernel and Image
b)Find dimK(T) and dimI(T) and show that
dimK(T)+dimi(T)=dimV
c)say if the transformations are injective, suprajective or
bijective
i)
such that:
ii),
such that:
iii)
, such that:
T:R? → R Tx,y,z) = (x - y, 22) T: M2:3 (R) → M2.2(R) SZD LED TEDT SID ZID IIDL sip-sip tip-tip) = T: P2(R) + P(R) T(p2)) = rp() +p (2)
In the following transformations:
a)Find the Kernel and Image
b)Find dimK(T) and dimI(T) and show that
dimK(T)+dimi(T)=dimV
c)say if the transformations are injective, suprajective or
bijective
i)
such that:
ii),
such that:
iii)
, such that:
T:R? → R Tx,y,z) = (x - y, 22) T: M2:3 (R) → M2.2(R) SZD LED TEDT SID ZID IIDL sip-sip tip-tip) = T: P2(R) + P(R) T(p2)) = rp() +p (2)
 A unit cube as shown in Figure Q1 is undergoing the transformations described in (i) and (ii) respectively. Sketch the resultant object with coordinates of each vertex after each transformation. (a) Z (0,1,1) (1,1,1) (0,0,1) (1,0,1) (0,0,0) (1,1,0) (1,0,0) Figure Q1 Transformation (i) (6 marks) 1. A Uniform scale by a factor of 2 2. Followed by a rotation about the-axis in counter-clockwise direction by 90 degrees 3. Followed by a transformation moving in the direction of < 2, 1,...
A unit cube as shown in Figure Q1 is undergoing the transformations described in (i) and (ii) respectively. Sketch the resultant object with coordinates of each vertex after each transformation. (a) Z (0,1,1) (1,1,1) (0,0,1) (1,0,1) (0,0,0) (1,1,0) (1,0,0) Figure Q1 Transformation (i) (6 marks) 1. A Uniform scale by a factor of 2 2. Followed by a rotation about the-axis in counter-clockwise direction by 90 degrees 3. Followed by a transformation moving in the direction of < 2, 1,...
 Let T. R3 R3 be a linear transformation. Use the given information to find the nullity of T. rank(7) - 1 nullity(T) - Give a geometric description of the kernel and range of T. The kernel of T is a plane, and the range of T is a line. o The kernel of T is all of R3, and the range of T is all of R. The kernel of T is the single point {(0, 0, 0)), and the...
Let T. R3 R3 be a linear transformation. Use the given information to find the nullity of T. rank(7) - 1 nullity(T) - Give a geometric description of the kernel and range of T. The kernel of T is a plane, and the range of T is a line. o The kernel of T is all of R3, and the range of T is all of R. The kernel of T is the single point {(0, 0, 0)), and the...
 linear algebra
Remember we were able to express rotations and reflections, which are geometric transformations, using a linear transformation T, the coef- ficient matrix corresponding to the geometric transformation (r. y) (r', ) (a) What problem do you encounter with translations (r. y) (r+ h.y+k)? To handle this problem, We let the vector (x, y1 ) in R2 correspond to the vector (x1, y1, 1), and conversely. (In effect, we're projecting the :xy-plane onto the plane 1) introduce homogeneous coordinates....
linear algebra
Remember we were able to express rotations and reflections, which are geometric transformations, using a linear transformation T, the coef- ficient matrix corresponding to the geometric transformation (r. y) (r', ) (a) What problem do you encounter with translations (r. y) (r+ h.y+k)? To handle this problem, We let the vector (x, y1 ) in R2 correspond to the vector (x1, y1, 1), and conversely. (In effect, we're projecting the :xy-plane onto the plane 1) introduce homogeneous coordinates....
 9. For each of the following, provide a suitable example, or else explain why no such example exists. [2 marks each]. a) A function f : C+C that is differentiable only on the line y = x. b) A function f :C+C that is analytic only on the line y = x. c) A non-constant, bounded, analytic function f with domain A = {z | Re(z) > 0} (i.e., the right half-plane). d) A Möbius transformation mapping the real axis...
9. For each of the following, provide a suitable example, or else explain why no such example exists. [2 marks each]. a) A function f : C+C that is differentiable only on the line y = x. b) A function f :C+C that is analytic only on the line y = x. c) A non-constant, bounded, analytic function f with domain A = {z | Re(z) > 0} (i.e., the right half-plane). d) A Möbius transformation mapping the real axis...
 ame 5. (20 points) Suppose SRR and TRR2 are linear transformations given by (o) Find the standard matrix for S (asuming the standard basis for R3 and for R2) (b) Find the standard matrix for T (assuming the standard basis for IR2 and for R). (c) Show that S and T are invertible. (d) Show that T is the inverse of S (e) What is the standard matrix for T (S (x)) ToS(),where z e R27
ame 5. (20 points) Suppose SRR and TRR2 are linear transformations given by (o) Find the standard matrix for S (asuming the standard basis for R3 and for R2) (b) Find the standard matrix for T (assuming the standard basis for IR2 and for R). (c) Show that S and T are invertible. (d) Show that T is the inverse of S (e) What is the standard matrix for T (S (x)) ToS(),where z e R27
 2. Consider the following transformations of R2 Tİ (z, y) (-r, y), T3(x, y) (z, _y), T,(zw) (y, x). Show that, for any j 1,2,3, a subset A C R2 is a Jordan region if and only if T,(A) is a Jordan region. What is the relation between the volumes of A and T, (A)?
2. Consider the following transformations of R2 Tİ (z, y) (-r, y), T3(x, y) (z, _y), T,(zw) (y, x). Show that, for any j 1,2,3,...
2. Consider the following transformations of R2 Tİ (z, y) (-r, y), T3(x, y) (z, _y), T,(zw) (y, x). Show that, for any j 1,2,3, a subset A C R2 is a Jordan region if and only if T,(A) is a Jordan region. What is the relation between the volumes of A and T, (A)?
2. Consider the following transformations of R2 Tİ (z, y) (-r, y), T3(x, y) (z, _y), T,(zw) (y, x). Show that, for any j 1,2,3,...
Most questions answered within 3 hours.
-
3) What are the typical social structures in a global city?
asked 21 minutes ago -
Luther Corporation
Consolidated Balance Sheet
December 31, 2019 and 2018 (in $ millions)
Assets
2019
2018...
asked 23 minutes ago -
(Expected rate of return and risk) Carter Inc. is evaluating a
security. Calculate the investment’s expected...
asked 3 hours ago -
What specific indicators can point to lack of progress for
African Americans in American society?
asked 4 hours ago -
1-The Electrons in a beam are moving at 2.7×108 m/s in an
electric field of 15000...
asked 4 hours ago -
A gas tank is a vertical cylinder. It has a radius of 1m, a
height of...
asked 4 hours ago -
Accent Software faces the following conditions. All of these
support Accent’s use of a market-penetration pricing...
asked 5 hours ago -
A mathematically inclined friend emails you the following
instructions: "Meet me in the cafeteria the first...
asked 5 hours ago -
A monopoly sells in two countries . The demand curves in the two
countries are p1...
asked 6 hours ago -
A .15kg rubber ball is bounced off a wall. Before hitting the
wall, the ball moves...
asked 7 hours ago -
A manufacturing company preparing to build a new plant is
considering three potential locations for it....
asked 7 hours ago -
B. If compound Y has approximately the same values of solubility
in toluene as compound X,...
asked 8 hours ago