

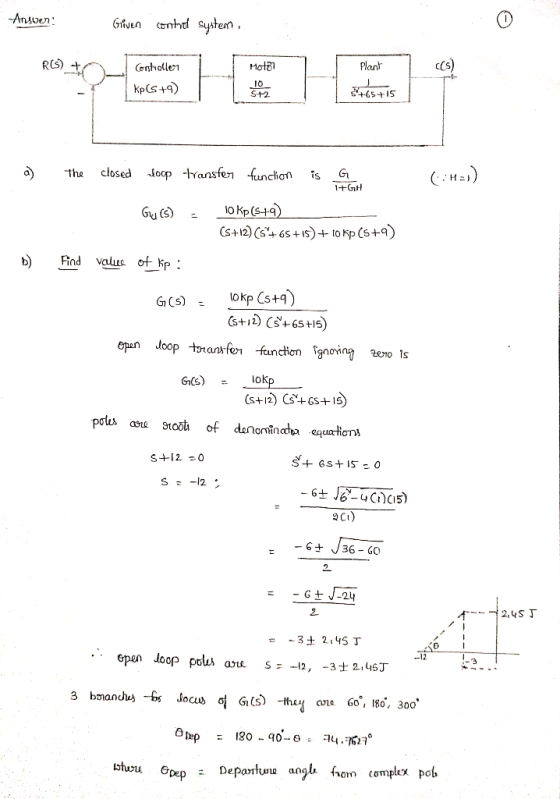
Motor Plant R(s)+ C(s) Controller 10 Kp (s+9) s2 +6s15 12 Figure 1: Unity feedback with PD control
Homework Answers

Add Answer to:
question b or the control system in Figure 1: C(s) Find the closed-loop transfer function T(s)-- R(s) a) b) Find a...
4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer f...
 4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the control...
 Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
PROBLEMA: (25%) A closed-loop control system is shown below Ds) T(O) U(A) C(s) (a) Show that a proportional controller (C(s)-kp) will never make the closed-loop system stable. (8%) (Hint: you nee...
 PROBLEMA: (25%) A closed-loop control system is shown below Ds) T(O) U(A) C(s) (a) Show that a proportional controller (C(s)-kp) will never make the closed-loop system stable. (8%) (Hint: you need to calculate the closed-loop pole locations and make discussion for the two possible cases.) (Medim) (b) When a PD controller is used (C(s)kp+ kps), calculate the steady state tracking error when both R(s) and D(s) are unit steps. (8%) (Easy) (e) Suppose R(s) is a unit step and D(s)...
PROBLEMA: (25%) A closed-loop control system is shown below Ds) T(O) U(A) C(s) (a) Show that a proportional controller (C(s)-kp) will never make the closed-loop system stable. (8%) (Hint: you need to calculate the closed-loop pole locations and make discussion for the two possible cases.) (Medim) (b) When a PD controller is used (C(s)kp+ kps), calculate the steady state tracking error when both R(s) and D(s) are unit steps. (8%) (Easy) (e) Suppose R(s) is a unit step and D(s)...
C(8) for the system shown in Figure 1. R(S Find the equivalent transfer function, Geg (s)...
 C(8) for the system shown in Figure 1. R(S Find the equivalent transfer function, Geg (s) 1 Cix) Figure 1. Block diagram 2s+1 s(5s+6Ge(s) = and Figure 2 shows a closed-loop transfer function, where G(s) 2. proper H(s) K+s. Find the overall closed-loop transfer function and express is as rational function. C(s) Ea (s) Controller R(s) +/ Plant G(s) Ge (s) Feedback H(s) Figure 2. Closed loop transfer function Construct the actuation Error Transfer Function associated with the system shown...
C(8) for the system shown in Figure 1. R(S Find the equivalent transfer function, Geg (s) 1 Cix) Figure 1. Block diagram 2s+1 s(5s+6Ge(s) = and Figure 2 shows a closed-loop transfer function, where G(s) 2. proper H(s) K+s. Find the overall closed-loop transfer function and express is as rational function. C(s) Ea (s) Controller R(s) +/ Plant G(s) Ge (s) Feedback H(s) Figure 2. Closed loop transfer function Construct the actuation Error Transfer Function associated with the system shown...
A unity feedback system with the forward transfer function G)2)(s +5) is operating with a closed-...
 A unity feedback system with the forward transfer function G)2)(s +5) is operating with a closed-loop step response that has 15% overshoot. Do the following: a) Evaluate the settling time for a unit step input; b) Design a PD control to yield a 15% overshoot but with a threefold reduction in settling time; c) Evaluate the settling time, overshoot, and steady-state error with the PD control.
A unity feedback system with the forward transfer function G)2)(s +5) is operating with...
A unity feedback system with the forward transfer function G)2)(s +5) is operating with a closed-loop step response that has 15% overshoot. Do the following: a) Evaluate the settling time for a unit step input; b) Design a PD control to yield a 15% overshoot but with a threefold reduction in settling time; c) Evaluate the settling time, overshoot, and steady-state error with the PD control.
A unity feedback system with the forward transfer function G)2)(s +5) is operating with...
A unity feedback system with the forward transfer function G (s) = s(s+2)(s15) is operating with ...
 A unity feedback system with the forward transfer function G (s) = s(s+2)(s15) is operating with a closed-loop step response that has 15% overshoot. Do the following: a) Evaluate the settling time for a unit step input b) Design a PD control to yield a 15% overshoot but with a threefold reduction in settling time; c) Evaluate the settling time, overshoot, and steady-state error with the PD control.
A unity feedback system with the forward transfer function G (s) =...
A unity feedback system with the forward transfer function G (s) = s(s+2)(s15) is operating with a closed-loop step response that has 15% overshoot. Do the following: a) Evaluate the settling time for a unit step input b) Design a PD control to yield a 15% overshoot but with a threefold reduction in settling time; c) Evaluate the settling time, overshoot, and steady-state error with the PD control.
A unity feedback system with the forward transfer function G (s) =...
Problem 1. A unity feedback system with forward transfer function G(s) is operating with a closed...
 Problem 1. A unity feedback system with forward transfer function G(s) is operating with a closed-loop step response that has 20.5% overshoot. G)-(+8)6 + 25) G(s) (a) Design a PD compens ator to decrease the settling time of the closed-loop system by a factor of four
Problem 1. A unity feedback system with forward transfer function G(s) is operating with a closed-loop step response that has 20.5% overshoot. G)-(+8)6 + 25) G(s) (a) Design a PD compens ator to decrease...
Problem 1. A unity feedback system with forward transfer function G(s) is operating with a closed-loop step response that has 20.5% overshoot. G)-(+8)6 + 25) G(s) (a) Design a PD compens ator to decrease the settling time of the closed-loop system by a factor of four
Problem 1. A unity feedback system with forward transfer function G(s) is operating with a closed-loop step response that has 20.5% overshoot. G)-(+8)6 + 25) G(s) (a) Design a PD compens ator to decrease...
R(s) Q1 (25p). The closed loop control system is shown in the figure. The response of...
 R(s) Q1 (25p). The closed loop control system is shown in the figure. The response of the control system to a unit step reference input is shown in below. C(s) Kp 0.6 S2 + 5s + A 4 a) Find and wn. b) Find Ke and A c) If we use a proportional-integral (PI) controller instead of a proportional (P) controller, how the graph would be expected to change. For two different integral coefficients (bigger Ki_1 and smaller K_2), make...
R(s) Q1 (25p). The closed loop control system is shown in the figure. The response of the control system to a unit step reference input is shown in below. C(s) Kp 0.6 S2 + 5s + A 4 a) Find and wn. b) Find Ke and A c) If we use a proportional-integral (PI) controller instead of a proportional (P) controller, how the graph would be expected to change. For two different integral coefficients (bigger Ki_1 and smaller K_2), make...
PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the g...
 PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
Determine: 1. The transfer function C(s)/R(s). Also find the closed-loop poles of the system. 2. The...
 Determine: 1. The transfer function C(s)/R(s). Also find the
closed-loop poles of the system. 2. The values of the undamped
natural frequency ωN and damping ratio ξ of the closed-loop poles.
3. The expressions of the rise time, the peak time, the maximum
overshoot, and the 2% settling time due to a unit-step reference
signal.
For the open-loop process with negative feedback R(S) Gp(S) C(s) H(s) 103 Go(s) = 1 , Gp(s)- s(s + 4) Determine: 1. The transfer function...
Determine: 1. The transfer function C(s)/R(s). Also find the
closed-loop poles of the system. 2. The values of the undamped
natural frequency ωN and damping ratio ξ of the closed-loop poles.
3. The expressions of the rise time, the peak time, the maximum
overshoot, and the 2% settling time due to a unit-step reference
signal.
For the open-loop process with negative feedback R(S) Gp(S) C(s) H(s) 103 Go(s) = 1 , Gp(s)- s(s + 4) Determine: 1. The transfer function...
 4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
 Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
 PROBLEMA: (25%) A closed-loop control system is shown below Ds) T(O) U(A) C(s) (a) Show that a proportional controller (C(s)-kp) will never make the closed-loop system stable. (8%) (Hint: you need to calculate the closed-loop pole locations and make discussion for the two possible cases.) (Medim) (b) When a PD controller is used (C(s)kp+ kps), calculate the steady state tracking error when both R(s) and D(s) are unit steps. (8%) (Easy) (e) Suppose R(s) is a unit step and D(s)...
PROBLEMA: (25%) A closed-loop control system is shown below Ds) T(O) U(A) C(s) (a) Show that a proportional controller (C(s)-kp) will never make the closed-loop system stable. (8%) (Hint: you need to calculate the closed-loop pole locations and make discussion for the two possible cases.) (Medim) (b) When a PD controller is used (C(s)kp+ kps), calculate the steady state tracking error when both R(s) and D(s) are unit steps. (8%) (Easy) (e) Suppose R(s) is a unit step and D(s)...
 C(8) for the system shown in Figure 1. R(S Find the equivalent transfer function, Geg (s) 1 Cix) Figure 1. Block diagram 2s+1 s(5s+6Ge(s) = and Figure 2 shows a closed-loop transfer function, where G(s) 2. proper H(s) K+s. Find the overall closed-loop transfer function and express is as rational function. C(s) Ea (s) Controller R(s) +/ Plant G(s) Ge (s) Feedback H(s) Figure 2. Closed loop transfer function Construct the actuation Error Transfer Function associated with the system shown...
C(8) for the system shown in Figure 1. R(S Find the equivalent transfer function, Geg (s) 1 Cix) Figure 1. Block diagram 2s+1 s(5s+6Ge(s) = and Figure 2 shows a closed-loop transfer function, where G(s) 2. proper H(s) K+s. Find the overall closed-loop transfer function and express is as rational function. C(s) Ea (s) Controller R(s) +/ Plant G(s) Ge (s) Feedback H(s) Figure 2. Closed loop transfer function Construct the actuation Error Transfer Function associated with the system shown...
 A unity feedback system with the forward transfer function G)2)(s +5) is operating with a closed-loop step response that has 15% overshoot. Do the following: a) Evaluate the settling time for a unit step input; b) Design a PD control to yield a 15% overshoot but with a threefold reduction in settling time; c) Evaluate the settling time, overshoot, and steady-state error with the PD control.
A unity feedback system with the forward transfer function G)2)(s +5) is operating with...
A unity feedback system with the forward transfer function G)2)(s +5) is operating with a closed-loop step response that has 15% overshoot. Do the following: a) Evaluate the settling time for a unit step input; b) Design a PD control to yield a 15% overshoot but with a threefold reduction in settling time; c) Evaluate the settling time, overshoot, and steady-state error with the PD control.
A unity feedback system with the forward transfer function G)2)(s +5) is operating with...
 A unity feedback system with the forward transfer function G (s) = s(s+2)(s15) is operating with a closed-loop step response that has 15% overshoot. Do the following: a) Evaluate the settling time for a unit step input b) Design a PD control to yield a 15% overshoot but with a threefold reduction in settling time; c) Evaluate the settling time, overshoot, and steady-state error with the PD control.
A unity feedback system with the forward transfer function G (s) =...
A unity feedback system with the forward transfer function G (s) = s(s+2)(s15) is operating with a closed-loop step response that has 15% overshoot. Do the following: a) Evaluate the settling time for a unit step input b) Design a PD control to yield a 15% overshoot but with a threefold reduction in settling time; c) Evaluate the settling time, overshoot, and steady-state error with the PD control.
A unity feedback system with the forward transfer function G (s) =...
 Problem 1. A unity feedback system with forward transfer function G(s) is operating with a closed-loop step response that has 20.5% overshoot. G)-(+8)6 + 25) G(s) (a) Design a PD compens ator to decrease the settling time of the closed-loop system by a factor of four
Problem 1. A unity feedback system with forward transfer function G(s) is operating with a closed-loop step response that has 20.5% overshoot. G)-(+8)6 + 25) G(s) (a) Design a PD compens ator to decrease...
Problem 1. A unity feedback system with forward transfer function G(s) is operating with a closed-loop step response that has 20.5% overshoot. G)-(+8)6 + 25) G(s) (a) Design a PD compens ator to decrease the settling time of the closed-loop system by a factor of four
Problem 1. A unity feedback system with forward transfer function G(s) is operating with a closed-loop step response that has 20.5% overshoot. G)-(+8)6 + 25) G(s) (a) Design a PD compens ator to decrease...
 R(s) Q1 (25p). The closed loop control system is shown in the figure. The response of the control system to a unit step reference input is shown in below. C(s) Kp 0.6 S2 + 5s + A 4 a) Find and wn. b) Find Ke and A c) If we use a proportional-integral (PI) controller instead of a proportional (P) controller, how the graph would be expected to change. For two different integral coefficients (bigger Ki_1 and smaller K_2), make...
R(s) Q1 (25p). The closed loop control system is shown in the figure. The response of the control system to a unit step reference input is shown in below. C(s) Kp 0.6 S2 + 5s + A 4 a) Find and wn. b) Find Ke and A c) If we use a proportional-integral (PI) controller instead of a proportional (P) controller, how the graph would be expected to change. For two different integral coefficients (bigger Ki_1 and smaller K_2), make...
 PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
PROBLEM 4 A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for 0,(1)-a. Here a ; 0.5%, Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G. (s) with the following controller: K2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence...
 Determine: 1. The transfer function C(s)/R(s). Also find the
closed-loop poles of the system. 2. The values of the undamped
natural frequency ωN and damping ratio ξ of the closed-loop poles.
3. The expressions of the rise time, the peak time, the maximum
overshoot, and the 2% settling time due to a unit-step reference
signal.
For the open-loop process with negative feedback R(S) Gp(S) C(s) H(s) 103 Go(s) = 1 , Gp(s)- s(s + 4) Determine: 1. The transfer function...
Determine: 1. The transfer function C(s)/R(s). Also find the
closed-loop poles of the system. 2. The values of the undamped
natural frequency ωN and damping ratio ξ of the closed-loop poles.
3. The expressions of the rise time, the peak time, the maximum
overshoot, and the 2% settling time due to a unit-step reference
signal.
For the open-loop process with negative feedback R(S) Gp(S) C(s) H(s) 103 Go(s) = 1 , Gp(s)- s(s + 4) Determine: 1. The transfer function...
Most questions answered within 3 hours.
-
Briefly describe an aspect of the strengths perspective that is
consistent with your own understanding of...
asked 1 minute ago -
Step by step method of using Sparse Identification of Nonlinear
Dynamics (SINDy) to model your own...
asked 8 minutes ago -
3) What are the typical social structures in a global city?
asked 3 hours ago -
Luther Corporation
Consolidated Balance Sheet
December 31, 2019 and 2018 (in $ millions)
Assets
2019
2018...
asked 3 hours ago -
(Expected rate of return and risk) Carter Inc. is evaluating a
security. Calculate the investment’s expected...
asked 5 hours ago -
What specific indicators can point to lack of progress for
African Americans in American society?
asked 6 hours ago -
1-The Electrons in a beam are moving at 2.7×108 m/s in an
electric field of 15000...
asked 7 hours ago -
A gas tank is a vertical cylinder. It has a radius of 1m, a
height of...
asked 7 hours ago -
Accent Software faces the following conditions. All of these
support Accent’s use of a market-penetration pricing...
asked 8 hours ago -
A mathematically inclined friend emails you the following
instructions: "Meet me in the cafeteria the first...
asked 8 hours ago -
A monopoly sells in two countries . The demand curves in the two
countries are p1...
asked 9 hours ago -
A .15kg rubber ball is bounced off a wall. Before hitting the
wall, the ball moves...
asked 10 hours ago