To understand the two most common procedures for finding torques when the forces and displacements are all in one plan...



 To understand the two most
common procedures for finding torques when the forces and
displacements are all in one plane: the moment arm method and the
tangential force method. The purpose of this problem is to give you
further practice finding torques in two-dimensional situations. In
this case it is overkill to use the full cross product definition
of the torque because the only nonzero component of the torque is
the component perpendicular to the plane containing the problem.
There are two common methods for finding torque in a
two-dimensional problem: the tangential force methodand the moment
arm method. Both of these methods will be illustrated in this
problem. Throughout the problem, torques that would cause
counterclockwise rotation are considered to be positive. Consider a
uniform pole of length L, attached at its base (via a pivot) to a
wall. The other end of the pole is attached to a cable, so that the
pole makes an angle? with respect to the wall, and the cable is
horizontal. The tension in the cable is T. The pole is attached to
the wall at point A. (Figure 1)
To understand the two most
common procedures for finding torques when the forces and
displacements are all in one plane: the moment arm method and the
tangential force method. The purpose of this problem is to give you
further practice finding torques in two-dimensional situations. In
this case it is overkill to use the full cross product definition
of the torque because the only nonzero component of the torque is
the component perpendicular to the plane containing the problem.
There are two common methods for finding torque in a
two-dimensional problem: the tangential force methodand the moment
arm method. Both of these methods will be illustrated in this
problem. Throughout the problem, torques that would cause
counterclockwise rotation are considered to be positive. Consider a
uniform pole of length L, attached at its base (via a pivot) to a
wall. The other end of the pole is attached to a cable, so that the
pole makes an angle? with respect to the wall, and the cable is
horizontal. The tension in the cable is T. The pole is attached to
the wall at point A. (Figure 1)
a) What is Ft, the magnitude of the tangential force that acts on the pole due to the tension in the rope? (Express your answer in terms of T and ?.) When using the tangential force method, you calculate the torque using the equation ?=Ftd, where d is the distance from the pivot to the point where the force is applied. The sign of the torque can be determined by checking which direction the tangential force would tend to cause the pole to rotate (where counterclockwise rotation implies positive torque).
b) What is the magnitude of the torque ? on the pole, about point A, due to the tension in the rope? (Express your answer in terms of T, L, and ?.) Moment arm method The moment arm method involves finding the effective moment arm of the force. To do this, imagine a line parallel to the force, running through the point at which the force is applied, and extending off to infinity in either direction. You may shift the force vector anywhere you like along this line without changing the torque, provided you do not change the direction of the force vector as you shift it. It is generally most convenient to shift the force vector to a point where the displacement from it to the desired pivot point is perpendicular to its direction. This displacement is called the moment arm. For example, consider the force due to tension acting on the pole. Shift the force vector to the left, so that it acts at a point directly above the point A in the figure. The moment arm of the force is the distance between the pivot and the tail of the shifted force vector. The magnitude of the torque about the pivot is the product of the moment arm and force, and the sign of the torque is again determined by the sense of the rotation of the pole it would cause. (Figure 3)
c) Find Rm, the length of the moment arm of the force. (Express your answer in terms of L and ?.) Now consider a woman standing on the ball of her foot as shown (Figure 4) . A normal force of magnitude N acts upward on the ball of her foot. The Achilles' tendon is attached to the back of the foot. The tendon pulls on the small bone in the rear of the foot with a force F. This small bone has a length x, and the angle between this bone and the Achilles' tendon is ?. The horizontal displacement between the ball of the foot and the point P is D.
d) Suppose you were asked to find the torque about point P due to the normal force N in terms of given quantities. Which method of finding the torque would be the easiest to use? Tangential force method or moment arm method.
e) Suppose you were asked to find the torque about point P due to the force of magnitude F in the Achilles' tendon. Which of the following statements is correct?
Homework Answers
The method required to solve this problem are tangential force method and moment arm method.
Initially use the trigonometric function to solve for the tangential component of the force.
Later use the torque equation used in the tangential force method to solve for torque due to tension force. Then use the trigonometric function to solve for the moment arm.
Finally identify the method that can be used for the given problem.
The tangential force method involves finding the component of the applied force that is perpendicular to the displacement from the pivot point to where the force is applied. This perpendicular component of the force is called the tangential force.
The torque equation used in the tangential force method is,
Here, is the tangential force, and d is the distance from the pivot point to the point where force is applied.
The moment arm method involves finding the effective moment arm of the force. The displacement is called the moment arm.
The torque equation used in the moment arm method is,
Here, is the force, and is the moment arm.
The trigonometric identity is as follows:
Here, is the angle, adjacent is the side adjacent to the angle , and hypotenuse is the longest side of the right-angled triangle.
The trigonometric identity is as follows:
Here, is the angle, opposite is the side opposite to the angle , and hypotenuse is the longest side of the right-angled triangle.
(a)
Draw the sketch of the diagram to find the tangential force . The Tension in the rope is . The angle between the tension and tangential force is .
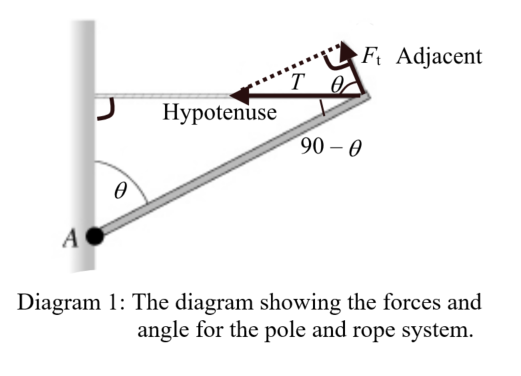
Use cosine function to solve for the tangential component of the Tension force .
Substitute for , and for adjacent in the equation and rearrange to solve for .
(b)
Use the torque equation of tangential force method.
Substitute for , and for in the equation .
(c)
Refer the diagram in the question with . The is the adjacent to the angle and is the hypotenuse.
Use cosine function to solve for the .
Substitute for , and for adjacent in the equation and rearrange to solve for .
Use the torque equation of moment arm method.
Substitute for , and for in the equation .
(d)
Determine the torque at point P due to normal force.
Torque about a point is given as,
Substitute -N for F and D for in the above equation.
Here, N is the normal force and D is the length of the moment arm of the force.
(e)
Determine the torque about point P due to the force of magnitude F by using both the methods.
Using tangential force method:
Use cosine function to solve for the tangential component of the force F.
Substitute F for , and for opposite in the equation and rearrange to solve for .
Use torque equation of tangential force method.
Substitute x for d and for in the equation .
Using moment arm method:
Draw perpendicular from the pivot point P to the line of action of force.
Use sine function to solve for the .
Substitute x for hypotenuse, and for opposite in the equation and rearrange to solve for .
Use the torque equation of moment arm method.
Substitute for in the equation .
Hence, either method can be used to find the torque.
Ans: Part aThe magnitude of tangential force that acts on the pole due to the tension in the rope is .
Add Answer to:
To understand the two most common procedures for finding torques when the forces and displacements are all in one plan...
The tangential force method involves finding the component of theapplied force that is perpendicular to the displacemen...
 The tangential force method involves finding the component of
theapplied force that is perpendicular to the displacement from
thepivot point to where the force is applied. This
perpendicularcomponent of the force is called the tangential
force.
(a) What is , the magnitude of the tangential
forcethat acts on the pole due to the tension in the rope?
Express your answer in terms
of and .
When using the tangential force method, you calculate the
torqueusing the equation
,
where is...
The tangential force method involves finding the component of
theapplied force that is perpendicular to the displacement from
thepivot point to where the force is applied. This
perpendicularcomponent of the force is called the tangential
force.
(a) What is , the magnitude of the tangential
forcethat acts on the pole due to the tension in the rope?
Express your answer in terms
of and .
When using the tangential force method, you calculate the
torqueusing the equation
,
where is...
To understand two different techniques for computing the torqueon an object due to an applied...
To understand two different techniques for computing the torque on an object due to an applied force.Imagine an object with a pivot point p at the origin of the coordinate system shown (Figure 1). The force vector F⃗ lies in the xy plane, and this force of magnitude F acts on the object at a point in the xy plane. The vector r⃗ is the position vector relative to the pivot point p to the point where F⃗ is applied.The torque on the...
The figure below shows a human arm that weighs 39.3 N. The arm is extended outward...
 The figure below shows a human arm that weighs 39.3 N. The arm
is extended outward and is motionless. The gravitational force
Fg
on the arm acts at point A, a distance of 0.290 m from
the shoulder joint, which is represented by point O. The
shoulder pushes down and to the right on the humerus bone of the
arm with a force
Fs
at point O, at an angle θ as shown. The
deltoid muscle pulls back on the...
The figure below shows a human arm that weighs 39.3 N. The arm
is extended outward and is motionless. The gravitational force
Fg
on the arm acts at point A, a distance of 0.290 m from
the shoulder joint, which is represented by point O. The
shoulder pushes down and to the right on the humerus bone of the
arm with a force
Fs
at point O, at an angle θ as shown. The
deltoid muscle pulls back on the...
4) Read the following and revise your free body diagram as necessary A common confusion when...
 4) Read the following and revise your free body diagram as necessary A common confusion when drawing extended free body diagrams is how to draw the force of gravity. For a static equilibrium situation like this, you should draw a single arrow to represent the force of gravity on an extended object. The tail of this vector is placed at the center of mass of the object. It is good practice to pause at this point and think about whether...
4) Read the following and revise your free body diagram as necessary A common confusion when drawing extended free body diagrams is how to draw the force of gravity. For a static equilibrium situation like this, you should draw a single arrow to represent the force of gravity on an extended object. The tail of this vector is placed at the center of mass of the object. It is good practice to pause at this point and think about whether...
Consider a cylindrical capacitor like that shown in Fig. 24.6. Let d = rb − ra...
 Consider a cylindrical capacitor like that shown in Fig. 24.6. Let d = rb − ra be the spacing between the inner and outer conductors. (a) Let the radii of the two conductors be only slightly different, so that d << ra. Show that the result derived in Example 24.4 (Section 24.1) for the capacitance of a cylindrical capacitor then reduces to Eq. (24.2), the equation for the capacitance of a parallel-plate capacitor, with A being the surface area of...
Consider a cylindrical capacitor like that shown in Fig. 24.6. Let d = rb − ra be the spacing between the inner and outer conductors. (a) Let the radii of the two conductors be only slightly different, so that d << ra. Show that the result derived in Example 24.4 (Section 24.1) for the capacitance of a cylindrical capacitor then reduces to Eq. (24.2), the equation for the capacitance of a parallel-plate capacitor, with A being the surface area of...
 The tangential force method involves finding the component of
theapplied force that is perpendicular to the displacement from
thepivot point to where the force is applied. This
perpendicularcomponent of the force is called the tangential
force.
(a) What is , the magnitude of the tangential
forcethat acts on the pole due to the tension in the rope?
Express your answer in terms
of and .
When using the tangential force method, you calculate the
torqueusing the equation
,
where is...
The tangential force method involves finding the component of
theapplied force that is perpendicular to the displacement from
thepivot point to where the force is applied. This
perpendicularcomponent of the force is called the tangential
force.
(a) What is , the magnitude of the tangential
forcethat acts on the pole due to the tension in the rope?
Express your answer in terms
of and .
When using the tangential force method, you calculate the
torqueusing the equation
,
where is...
 The figure below shows a human arm that weighs 39.3 N. The arm
is extended outward and is motionless. The gravitational force
Fg
on the arm acts at point A, a distance of 0.290 m from
the shoulder joint, which is represented by point O. The
shoulder pushes down and to the right on the humerus bone of the
arm with a force
Fs
at point O, at an angle θ as shown. The
deltoid muscle pulls back on the...
The figure below shows a human arm that weighs 39.3 N. The arm
is extended outward and is motionless. The gravitational force
Fg
on the arm acts at point A, a distance of 0.290 m from
the shoulder joint, which is represented by point O. The
shoulder pushes down and to the right on the humerus bone of the
arm with a force
Fs
at point O, at an angle θ as shown. The
deltoid muscle pulls back on the...
 4) Read the following and revise your free body diagram as necessary A common confusion when drawing extended free body diagrams is how to draw the force of gravity. For a static equilibrium situation like this, you should draw a single arrow to represent the force of gravity on an extended object. The tail of this vector is placed at the center of mass of the object. It is good practice to pause at this point and think about whether...
4) Read the following and revise your free body diagram as necessary A common confusion when drawing extended free body diagrams is how to draw the force of gravity. For a static equilibrium situation like this, you should draw a single arrow to represent the force of gravity on an extended object. The tail of this vector is placed at the center of mass of the object. It is good practice to pause at this point and think about whether...
 Consider a cylindrical capacitor like that shown in Fig. 24.6. Let d = rb − ra be the spacing between the inner and outer conductors. (a) Let the radii of the two conductors be only slightly different, so that d << ra. Show that the result derived in Example 24.4 (Section 24.1) for the capacitance of a cylindrical capacitor then reduces to Eq. (24.2), the equation for the capacitance of a parallel-plate capacitor, with A being the surface area of...
Consider a cylindrical capacitor like that shown in Fig. 24.6. Let d = rb − ra be the spacing between the inner and outer conductors. (a) Let the radii of the two conductors be only slightly different, so that d << ra. Show that the result derived in Example 24.4 (Section 24.1) for the capacitance of a cylindrical capacitor then reduces to Eq. (24.2), the equation for the capacitance of a parallel-plate capacitor, with A being the surface area of...
Most questions answered within 3 hours.
-
Living in a group could bring several disadvantages to an
individual. What are some of the...
asked 3 minutes ago -
Complete and balance the following reactions. In case of no
reaction occurring write NR.
Mix #1:...
asked 8 minutes ago -
If an economy consumes 75% of any increase in income, then an
increase in autonomous investment...
asked 12 minutes ago -
A shotputter throws the shot with an initial speed of 15.8 m/s
at a 38.0 ∘...
asked 27 minutes ago -
Debra and Merina sell electronic equipment and supplies through
their partnership. They wish to expand their...
asked 28 minutes ago -
How does a linear regression allow you to better estimate
trends, costs, and other factors in...
asked 36 minutes ago -
1. (15%) Describe the difference between a pull (Kanban), push
and CONWIP production systems.
asked 32 minutes ago -
QUESTION 5
The total area under the Z distribution curve is equal to:
a.
10
b....
asked 41 minutes ago -
Using Python
The variables x and y refer to numbers. Write a code segment
that prompts...
asked 55 minutes ago -
If
the coefficient of static friction between a box and the floor is
0.35 with what...
asked 58 minutes ago -
A die is designed to punch holes with a radius of 1.08 10-2 m in
a...
asked 1 hour ago -
government can increase import through
a. export subsidies
b. tax breaks
c. increase import tax
d....
asked 1 hour ago