
Homework Answers

![LO 4CM) = -6060-w)ucn) - 10 MCO-wicm) + 70 Cor83ula). 0.4 yan) = -60 Coot]üucn) - 25 nCotuen) +70 Co-)uca). (6) (m) = s(m](http://img.homeworklib.com/questions/7a322250-2409-11eb-9c5b-a7217ae4a443.png?x-oss-process=image/resize,w_560)

Add Answer to:
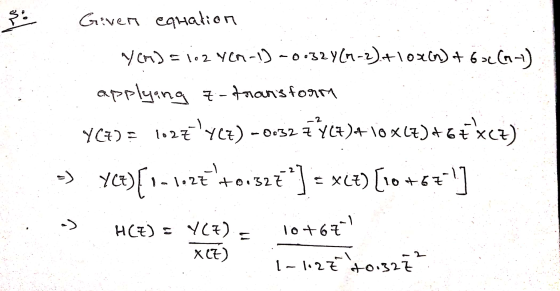
1. Determine y(n) of the given LTI Difference equation y(n)=1.2 y(n-1) -0.32 y(n-2)+10x(n) +6x(n-1) a. x(n)...
Problem 2 Given is the LCC difference equation that represents some LTI system: y(n)y(n 2) =...
 Problem 2 Given is the LCC difference equation that represents some LTI system: y(n)y(n 2) = x(n) +;x(n- 1) 2 Draw a Direct- I and Direct Il block diagram representations of the system Find the impulse response of the system a) b)
Problem 2 Given is the LCC difference equation that represents some LTI system: y(n)y(n 2) = x(n) +;x(n- 1) 2 Draw a Direct- I and Direct Il block diagram representations of the system Find the impulse response of the system a) b)
2) An LTI DT system is defined by the difference equation: y[n] = -0.4yIn - 1]...
 2) An LTI DT system is defined by the difference equation: y[n] = -0.4yIn - 1] + x[n]. a) Derive the impulse response of the system. (2 pt) b) Determine if the system is BIBO stable. (1 pt) c) Assuming initial conditions yl-1) = 1, derive the complete system response to an input x[n] = u[n] - u[n-2), for n > 0.(2 pt) d) Derive the zero-state system response to an input z[n] = u[n] - 2u[n - 2] +...
2) An LTI DT system is defined by the difference equation: y[n] = -0.4yIn - 1] + x[n]. a) Derive the impulse response of the system. (2 pt) b) Determine if the system is BIBO stable. (1 pt) c) Assuming initial conditions yl-1) = 1, derive the complete system response to an input x[n] = u[n] - u[n-2), for n > 0.(2 pt) d) Derive the zero-state system response to an input z[n] = u[n] - 2u[n - 2] +...
Determine the difference equation relating the input (x[n]) and outpt (y[n])
(a) Determine the difference equation relating the input (x[n]) and outpt (y[n]) for an LTI system whose impulse response is given by: h(n) = (1/4){δ(n) + δ(n - 1) (b) Find and plot the amplitude and phase response of the above LTI system. Indicate what kind of filter this system represents.
Determine the impulse response h[n] of the LTI system described by the difference equation
Determine the impulse response h[n] of the LTI system described by the difference equationy[n] - 0.35y[n-1] = x[n]
Consider an LTI system whose input x[n] and output y[n] are related by the difference equation...
 Consider an LTI system whose input x[n] and output y[n] are related by the difference equation y[n – 1] + 3 y[n] + $y[n + 1] = x[n]. Determine the three possible choices for the impulse response that makes this system 1) causal, 2) two-sided and 3) anti-causal. Then for each case, determine if the system is stable or not. Causality Impulse Response Stability Causal Unstable v two-sided Unstable anti-Causal Unstable y In your answers, enter z(n) for a discrete-time...
Consider an LTI system whose input x[n] and output y[n] are related by the difference equation y[n – 1] + 3 y[n] + $y[n + 1] = x[n]. Determine the three possible choices for the impulse response that makes this system 1) causal, 2) two-sided and 3) anti-causal. Then for each case, determine if the system is stable or not. Causality Impulse Response Stability Causal Unstable v two-sided Unstable anti-Causal Unstable y In your answers, enter z(n) for a discrete-time...
Consider the LTI system described by the following impulse response: (a) h(n) = 2(0.5)n u(n). Determine:...
Consider the LTI system described by the following impulse response: (a) h(n) = 2(0.5)n u(n). Determine: (i) The system function representation; (ii) the difference-equation representation (Note: this is just terminology that refers to expressing the input and output time-domain signals in the form of an equation. E.g., what we did when we went over the equations for block diagrams); (iii) The pole-zero plot, sketched by hand; and (iv) the output y(n) if the input is x(n) = (0.25)n u(n) [10...
a causal discrete time LTI system is implemented using the difference equation y(n)-0.5y(n-1)=x(n)+x(n-1) where x(n) is...
a causal discrete time LTI system is implemented using the difference equation y(n)-0.5y(n-1)=x(n)+x(n-1) where x(n) is the input signal and y(n) the output signal. Find and sketch the impulse response of the system
Consider an LTI system with input sequence x[n] and output sequence y[n] that satisfy the difference equation
Consider an LTI system with input sequence x[n] and output sequence y[n] that satisfy the difference equation 3y[n] – 7y[n – 1] + 2y[n – 2] = 3x[n] – 3x[n – 1] (2.1) The fact that sequences x[ ] and y[ ] are in input-output relation and satisfy (2.1) does not yet determine which LTI system. a) We assume each possible input sequence to this system has its Z-transform and that the impulse response of this system also has its Z-transform. Express the...
For the LTI system with the difference equation y[n] = 0.25x[n] +0.5x[n-1] + 0.25x[n-2] a. Find...
For the LTI system with the difference equation y[n] = 0.25x[n] +0.5x[n-1] + 0.25x[n-2] a. Find the impulse response h[n] (this is y[n] when x[n] = δ[n] ) b. Find the frequency response function H(?^?ω). Your result should be in the form of A(?^?θ(?) )[cos(αω)+β]. Specify values for A, ?(?), α,and β c. Evaluate H(?^?ω) for ω = π , π/2 , π/4, 0, -π/4, - π/2, -π d. Plot H(?^?ω) in magnitude and phase for –π < ω <...
Please show full Calculations for part C) 1. Consider the following causal LTI systems with difference...
 Please show full Calculations for part C)
1. Consider the following causal LTI systems with difference equations (a) yIn]+3 y[n-1]+2y[n-2] - x[n] + 2xln-1] (b) y[n] +0.8 y[n-21 x[n-1]. (c) y[n] -0.5 yln-2 2x[n] -xln-21]. In each of cases a,b and c i) Find and sketch the impulse response, hin) by recursive solution. ii) Is the system FIR or IIR ? ii) Find and sketch the corresponding step response, s[n] iv) Draw the direct form & direct-form Il structures for...
Please show full Calculations for part C)
1. Consider the following causal LTI systems with difference equations (a) yIn]+3 y[n-1]+2y[n-2] - x[n] + 2xln-1] (b) y[n] +0.8 y[n-21 x[n-1]. (c) y[n] -0.5 yln-2 2x[n] -xln-21]. In each of cases a,b and c i) Find and sketch the impulse response, hin) by recursive solution. ii) Is the system FIR or IIR ? ii) Find and sketch the corresponding step response, s[n] iv) Draw the direct form & direct-form Il structures for...
 Problem 2 Given is the LCC difference equation that represents some LTI system: y(n)y(n 2) = x(n) +;x(n- 1) 2 Draw a Direct- I and Direct Il block diagram representations of the system Find the impulse response of the system a) b)
Problem 2 Given is the LCC difference equation that represents some LTI system: y(n)y(n 2) = x(n) +;x(n- 1) 2 Draw a Direct- I and Direct Il block diagram representations of the system Find the impulse response of the system a) b)
 2) An LTI DT system is defined by the difference equation: y[n] = -0.4yIn - 1] + x[n]. a) Derive the impulse response of the system. (2 pt) b) Determine if the system is BIBO stable. (1 pt) c) Assuming initial conditions yl-1) = 1, derive the complete system response to an input x[n] = u[n] - u[n-2), for n > 0.(2 pt) d) Derive the zero-state system response to an input z[n] = u[n] - 2u[n - 2] +...
2) An LTI DT system is defined by the difference equation: y[n] = -0.4yIn - 1] + x[n]. a) Derive the impulse response of the system. (2 pt) b) Determine if the system is BIBO stable. (1 pt) c) Assuming initial conditions yl-1) = 1, derive the complete system response to an input x[n] = u[n] - u[n-2), for n > 0.(2 pt) d) Derive the zero-state system response to an input z[n] = u[n] - 2u[n - 2] +...
 Consider an LTI system whose input x[n] and output y[n] are related by the difference equation y[n – 1] + 3 y[n] + $y[n + 1] = x[n]. Determine the three possible choices for the impulse response that makes this system 1) causal, 2) two-sided and 3) anti-causal. Then for each case, determine if the system is stable or not. Causality Impulse Response Stability Causal Unstable v two-sided Unstable anti-Causal Unstable y In your answers, enter z(n) for a discrete-time...
Consider an LTI system whose input x[n] and output y[n] are related by the difference equation y[n – 1] + 3 y[n] + $y[n + 1] = x[n]. Determine the three possible choices for the impulse response that makes this system 1) causal, 2) two-sided and 3) anti-causal. Then for each case, determine if the system is stable or not. Causality Impulse Response Stability Causal Unstable v two-sided Unstable anti-Causal Unstable y In your answers, enter z(n) for a discrete-time...
 Please show full Calculations for part C)
1. Consider the following causal LTI systems with difference equations (a) yIn]+3 y[n-1]+2y[n-2] - x[n] + 2xln-1] (b) y[n] +0.8 y[n-21 x[n-1]. (c) y[n] -0.5 yln-2 2x[n] -xln-21]. In each of cases a,b and c i) Find and sketch the impulse response, hin) by recursive solution. ii) Is the system FIR or IIR ? ii) Find and sketch the corresponding step response, s[n] iv) Draw the direct form & direct-form Il structures for...
Please show full Calculations for part C)
1. Consider the following causal LTI systems with difference equations (a) yIn]+3 y[n-1]+2y[n-2] - x[n] + 2xln-1] (b) y[n] +0.8 y[n-21 x[n-1]. (c) y[n] -0.5 yln-2 2x[n] -xln-21]. In each of cases a,b and c i) Find and sketch the impulse response, hin) by recursive solution. ii) Is the system FIR or IIR ? ii) Find and sketch the corresponding step response, s[n] iv) Draw the direct form & direct-form Il structures for...
Most questions answered within 3 hours.
-
Find the area of the shaded region. The graph to the right
depicts IQ scores of...
asked 8 seconds ago -
A spring is characterized by a spring constant of 60 N/m. How
much potential energy does...
asked 1 minute ago -
strategic hr:
Devise staffing strategies for the following organizations:
Church based soup kitchen staffed with volunteers...
asked 3 minutes ago -
1887, Barnes, a physician living in Carlilse, Cumberland NW
England reports on a case of food...
asked 3 minutes ago -
Residents of two states were surveyed regarding whether or not
they were fans of professional football...
asked 16 minutes ago -
A study was done to compare the amount of time per day students
at public and...
asked 23 minutes ago -
For regularization, we added the regularizer to the loss
function. Does it make sense to multiply...
asked 29 minutes ago -
b. A freezer you got from a student sale has an inside
temperature of – 10C;...
asked 31 minutes ago -
PEARSON
Years
S&P 500
Stock Price
2014
1,692
$68.00
2015
1,978
$102.00
2016
1,884
$110.00
2017...
asked 33 minutes ago -
You roll a fair 6-sided dice, let Y be the outcome of the dice
roll. Then...
asked 1 hour ago -
If the value of the range is equal to zero, then this indicates
that:
A. there...
asked 1 hour ago -
Based on Simms' (1994) articulation of psychological privacy to
promote development of self-identity, for example, do...
asked 45 minutes ago