
Homework Answers

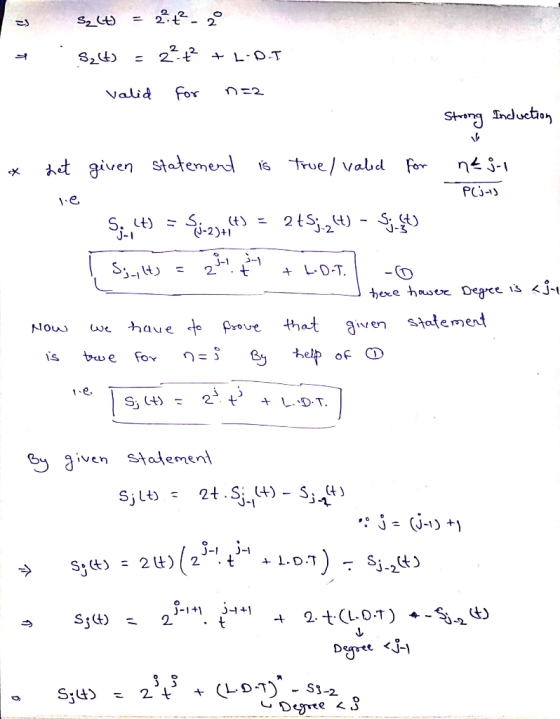
![o By siz has maximum Degace 3-2 [By Induction] Sp(t)=2 + + (Polynomial of Degree i) . 1 + (polynomial of Degree < 5-2) S; (t)](http://img.homeworklib.com/questions/53d36550-b596-11ea-8ba3-85858be3bda2.png?x-oss-process=image/resize,w_560)
Doubts are welcome .
Thank You !
Add Answer to:
1. be The Chebyshev polynomials of the second type So, S1, S2, ... follow the Sj+1(t)...
1. Why do S1 and S2 exist? 2. Where does equation 2 come from? subsets of...
 1.
Why do S1 and S2 exist?
2. Where does equation 2 come from?
subsets of a vector space and let S, be a subset of S2. Then Let Si and S2 be finite subsets of a vector the following statements are true: (a) If S, is linearly dependent, so is S2. (b) If S2 is linearly independent, so is Si. Proof Let Si = {V1, V2, ..., vk and S2 = {V1, V2, ..., Vk, Vx+1, ..., Vm). We...
1.
Why do S1 and S2 exist?
2. Where does equation 2 come from?
subsets of a vector space and let S, be a subset of S2. Then Let Si and S2 be finite subsets of a vector the following statements are true: (a) If S, is linearly dependent, so is S2. (b) If S2 is linearly independent, so is Si. Proof Let Si = {V1, V2, ..., vk and S2 = {V1, V2, ..., Vk, Vx+1, ..., Vm). We...
5. Let ф: S1 S2 be a diffeomorphism. a. Show that S is orientable if and...
 5. Let ф: S1 S2 be a diffeomorphism. a. Show that S is orientable if and only if S2 is orientable (thus, orientability is preserved by diffeomorphisms). b. Let S, and S2 be orientable and oriented. Prove that the diffeomorphism ф induces an orientation in S. Use the antipodal map of the sphere (Exercise 1, Sec. 2-3) to show that this orientation may be distinct (cf. Exercise 4) from the initial one (thus, orientation itself may not be preserved by...
5. Let ф: S1 S2 be a diffeomorphism. a. Show that S is orientable if and only if S2 is orientable (thus, orientability is preserved by diffeomorphisms). b. Let S, and S2 be orientable and oriented. Prove that the diffeomorphism ф induces an orientation in S. Use the antipodal map of the sphere (Exercise 1, Sec. 2-3) to show that this orientation may be distinct (cf. Exercise 4) from the initial one (thus, orientation itself may not be preserved by...
show steps 7 pts) Consider an FSK system where bits 1 and 0 are transmitted using signals si(t) and s2(t) 2Eb 2Eb where θ1 and 02 are the phases of the two signals. (a) (3 pt) Find the correlation...
 show steps
7 pts) Consider an FSK system where bits 1 and 0 are transmitted using signals si(t) and s2(t) 2Eb 2Eb where θ1 and 02 are the phases of the two signals. (a) (3 pt) Find the correlation between the signal s1(t) ard salt), i.e., find oin(t)s2(t)dt. b) (2 pt) Assuming non-coherent carriers, i.e., θ|メ02, state the condition for which the correlation derived in part (a) goes to zero. (c) (2 pt) Repeat part (b) for the case where...
show steps
7 pts) Consider an FSK system where bits 1 and 0 are transmitted using signals si(t) and s2(t) 2Eb 2Eb where θ1 and 02 are the phases of the two signals. (a) (3 pt) Find the correlation between the signal s1(t) ard salt), i.e., find oin(t)s2(t)dt. b) (2 pt) Assuming non-coherent carriers, i.e., θ|メ02, state the condition for which the correlation derived in part (a) goes to zero. (c) (2 pt) Repeat part (b) for the case where...
9. Let S be the capped cylindrical surtace showh in rigure 12.12 i ua) of (T, y,z) a2+y21,0z 1, and S2 is defined b...
 9. Let S be the capped cylindrical surtace showh in rigure 12.12 i ua) of (T, y,z) a2+y21,0z 1, and S2 is defined by a2 +y2+(z-1) 1, 21 F(x, y, z) = (zx+z?y+z) i+ (z?yx+9)j+z4x2k. Compute l (v x F union of two surfaces Si and 2, where S1 is the set of (z
9. Let S be the capped cylindrical surtace showh in rigure 12.12 i ua) of (T, y,z) a2+y21,0z 1, and S2 is defined by a2 +y2+(z-1)...
9. Let S be the capped cylindrical surtace showh in rigure 12.12 i ua) of (T, y,z) a2+y21,0z 1, and S2 is defined by a2 +y2+(z-1) 1, 21 F(x, y, z) = (zx+z?y+z) i+ (z?yx+9)j+z4x2k. Compute l (v x F union of two surfaces Si and 2, where S1 is the set of (z
9. Let S be the capped cylindrical surtace showh in rigure 12.12 i ua) of (T, y,z) a2+y21,0z 1, and S2 is defined by a2 +y2+(z-1)...
Find the first six partial sums S1, S2. S3, S4, S5, S. of the sequence. 1...
 Find the first six partial sums S1, S2. S3, S4, S5, S. of the sequence. 1 1 1 1 3° 32' 33 34 3 Give your answers as fractions. S, = S2 S3 = S4= Ss = So
Find the first six partial sums S1, S2. S3, S4, S5, S. of the sequence. 1 1 1 1 3° 32' 33 34 3 Give your answers as fractions. S, = S2 S3 = S4= Ss = So
5 Problem 4.41 Consider the second-order plant with transfer function: 1 G(s) = (s1)(5s 1) and...
 5 Problem 4.41 Consider the second-order plant with transfer function: 1 G(s) = (s1)(5s 1) and in a unity feedback structure 1. Determine the system type and error constant with respect to tracking polynomial reference inputs of the system for P (i.e., De = kp), PD (i.e., Dc = kp+kps), and PID (i.e., De=kp +ki/s+ kps) controllers. Let kp = 19,ki 0.5,kp = 4/19. 2. Determine the system type and error constant of the system with respect to disturbance inputs...
5 Problem 4.41 Consider the second-order plant with transfer function: 1 G(s) = (s1)(5s 1) and in a unity feedback structure 1. Determine the system type and error constant with respect to tracking polynomial reference inputs of the system for P (i.e., De = kp), PD (i.e., Dc = kp+kps), and PID (i.e., De=kp +ki/s+ kps) controllers. Let kp = 19,ki 0.5,kp = 4/19. 2. Determine the system type and error constant of the system with respect to disturbance inputs...
Using a Taylor expansion up to second order in s/d and s2l/d, show that in the...
 Using a Taylor expansion up to second order in s/d and s2l/d, show that in the limit of large d the term AH in eqn 4.27 becomes 1 3(suur)(s2u) - S1 S2 (4.30) AĤ = - -- Si =rı + duc/2, S2 = r2 - duz/2. 1 - (4.27) ra – r r - duy/2 r2 + du/2"
Using a Taylor expansion up to second order in s/d and s2l/d, show that in the limit of large d the term AH in eqn 4.27 becomes 1 3(suur)(s2u) - S1 S2 (4.30) AĤ = - -- Si =rı + duc/2, S2 = r2 - duz/2. 1 - (4.27) ra – r r - duy/2 r2 + du/2"
Consider the following four problems: Bin Packing: Given n items with positive integer sizes s1,s2,...,sn, a...
Consider the following four problems: Bin Packing: Given n items with positive integer sizes s1,s2,...,sn, a capacity C for bins and a positive integer k, is it possible to pack the n items using at most k bins? Partition: Given a set S of n integers, is it possible to partition S into two subsets S1 and S2 so that the sum of the integers in S1 is equal to the sum of the integers in S2? Longest Path: Given...
A digital communication system uses the signals si(t) and s2(t) shown in Fig. 1 to t equally like...
 A digital communication system uses the signals si(t) and s2(t) shown in Fig. 1 to t equally likely bits '0' and '1', respectively. The signaling duration is 4 seconds. The receiver uses a filter h(t) shown in Fig. 2 s1 (t) s2(t) 0 Figure 1: Set of signals in Problem 1 h(t) 0 Figure 2: h(t) in Problem 1 (a) Determine the parameter ri for this system. HINT: Remember that ri is equal to this convolution 81(t) * h(t) evaluated...
A digital communication system uses the signals si(t) and s2(t) shown in Fig. 1 to t equally likely bits '0' and '1', respectively. The signaling duration is 4 seconds. The receiver uses a filter h(t) shown in Fig. 2 s1 (t) s2(t) 0 Figure 1: Set of signals in Problem 1 h(t) 0 Figure 2: h(t) in Problem 1 (a) Determine the parameter ri for this system. HINT: Remember that ri is equal to this convolution 81(t) * h(t) evaluated...
Prove that using Bromwich's integral 3 = t- e-t/2, 8+1 sen(t) -1 a) 2 (s2+s+1)} -...
 Prove that
using Bromwich's integral
3 = t- e-t/2, 8+1 sen(t) -1 a) 2 (s2+s+1)} - 8+1 s(s2+1 1 + sen(t) - cos(t) =
Prove that
using Bromwich's integral
3 = t- e-t/2, 8+1 sen(t) -1 a) 2 (s2+s+1)} - 8+1 s(s2+1 1 + sen(t) - cos(t) =
 1.
Why do S1 and S2 exist?
2. Where does equation 2 come from?
subsets of a vector space and let S, be a subset of S2. Then Let Si and S2 be finite subsets of a vector the following statements are true: (a) If S, is linearly dependent, so is S2. (b) If S2 is linearly independent, so is Si. Proof Let Si = {V1, V2, ..., vk and S2 = {V1, V2, ..., Vk, Vx+1, ..., Vm). We...
1.
Why do S1 and S2 exist?
2. Where does equation 2 come from?
subsets of a vector space and let S, be a subset of S2. Then Let Si and S2 be finite subsets of a vector the following statements are true: (a) If S, is linearly dependent, so is S2. (b) If S2 is linearly independent, so is Si. Proof Let Si = {V1, V2, ..., vk and S2 = {V1, V2, ..., Vk, Vx+1, ..., Vm). We...
 5. Let ф: S1 S2 be a diffeomorphism. a. Show that S is orientable if and only if S2 is orientable (thus, orientability is preserved by diffeomorphisms). b. Let S, and S2 be orientable and oriented. Prove that the diffeomorphism ф induces an orientation in S. Use the antipodal map of the sphere (Exercise 1, Sec. 2-3) to show that this orientation may be distinct (cf. Exercise 4) from the initial one (thus, orientation itself may not be preserved by...
5. Let ф: S1 S2 be a diffeomorphism. a. Show that S is orientable if and only if S2 is orientable (thus, orientability is preserved by diffeomorphisms). b. Let S, and S2 be orientable and oriented. Prove that the diffeomorphism ф induces an orientation in S. Use the antipodal map of the sphere (Exercise 1, Sec. 2-3) to show that this orientation may be distinct (cf. Exercise 4) from the initial one (thus, orientation itself may not be preserved by...
 show steps
7 pts) Consider an FSK system where bits 1 and 0 are transmitted using signals si(t) and s2(t) 2Eb 2Eb where θ1 and 02 are the phases of the two signals. (a) (3 pt) Find the correlation between the signal s1(t) ard salt), i.e., find oin(t)s2(t)dt. b) (2 pt) Assuming non-coherent carriers, i.e., θ|メ02, state the condition for which the correlation derived in part (a) goes to zero. (c) (2 pt) Repeat part (b) for the case where...
show steps
7 pts) Consider an FSK system where bits 1 and 0 are transmitted using signals si(t) and s2(t) 2Eb 2Eb where θ1 and 02 are the phases of the two signals. (a) (3 pt) Find the correlation between the signal s1(t) ard salt), i.e., find oin(t)s2(t)dt. b) (2 pt) Assuming non-coherent carriers, i.e., θ|メ02, state the condition for which the correlation derived in part (a) goes to zero. (c) (2 pt) Repeat part (b) for the case where...
 9. Let S be the capped cylindrical surtace showh in rigure 12.12 i ua) of (T, y,z) a2+y21,0z 1, and S2 is defined by a2 +y2+(z-1) 1, 21 F(x, y, z) = (zx+z?y+z) i+ (z?yx+9)j+z4x2k. Compute l (v x F union of two surfaces Si and 2, where S1 is the set of (z
9. Let S be the capped cylindrical surtace showh in rigure 12.12 i ua) of (T, y,z) a2+y21,0z 1, and S2 is defined by a2 +y2+(z-1)...
9. Let S be the capped cylindrical surtace showh in rigure 12.12 i ua) of (T, y,z) a2+y21,0z 1, and S2 is defined by a2 +y2+(z-1) 1, 21 F(x, y, z) = (zx+z?y+z) i+ (z?yx+9)j+z4x2k. Compute l (v x F union of two surfaces Si and 2, where S1 is the set of (z
9. Let S be the capped cylindrical surtace showh in rigure 12.12 i ua) of (T, y,z) a2+y21,0z 1, and S2 is defined by a2 +y2+(z-1)...
 Find the first six partial sums S1, S2. S3, S4, S5, S. of the sequence. 1 1 1 1 3° 32' 33 34 3 Give your answers as fractions. S, = S2 S3 = S4= Ss = So
Find the first six partial sums S1, S2. S3, S4, S5, S. of the sequence. 1 1 1 1 3° 32' 33 34 3 Give your answers as fractions. S, = S2 S3 = S4= Ss = So
 5 Problem 4.41 Consider the second-order plant with transfer function: 1 G(s) = (s1)(5s 1) and in a unity feedback structure 1. Determine the system type and error constant with respect to tracking polynomial reference inputs of the system for P (i.e., De = kp), PD (i.e., Dc = kp+kps), and PID (i.e., De=kp +ki/s+ kps) controllers. Let kp = 19,ki 0.5,kp = 4/19. 2. Determine the system type and error constant of the system with respect to disturbance inputs...
5 Problem 4.41 Consider the second-order plant with transfer function: 1 G(s) = (s1)(5s 1) and in a unity feedback structure 1. Determine the system type and error constant with respect to tracking polynomial reference inputs of the system for P (i.e., De = kp), PD (i.e., Dc = kp+kps), and PID (i.e., De=kp +ki/s+ kps) controllers. Let kp = 19,ki 0.5,kp = 4/19. 2. Determine the system type and error constant of the system with respect to disturbance inputs...
 Using a Taylor expansion up to second order in s/d and s2l/d, show that in the limit of large d the term AH in eqn 4.27 becomes 1 3(suur)(s2u) - S1 S2 (4.30) AĤ = - -- Si =rı + duc/2, S2 = r2 - duz/2. 1 - (4.27) ra – r r - duy/2 r2 + du/2"
Using a Taylor expansion up to second order in s/d and s2l/d, show that in the limit of large d the term AH in eqn 4.27 becomes 1 3(suur)(s2u) - S1 S2 (4.30) AĤ = - -- Si =rı + duc/2, S2 = r2 - duz/2. 1 - (4.27) ra – r r - duy/2 r2 + du/2"
 A digital communication system uses the signals si(t) and s2(t) shown in Fig. 1 to t equally likely bits '0' and '1', respectively. The signaling duration is 4 seconds. The receiver uses a filter h(t) shown in Fig. 2 s1 (t) s2(t) 0 Figure 1: Set of signals in Problem 1 h(t) 0 Figure 2: h(t) in Problem 1 (a) Determine the parameter ri for this system. HINT: Remember that ri is equal to this convolution 81(t) * h(t) evaluated...
A digital communication system uses the signals si(t) and s2(t) shown in Fig. 1 to t equally likely bits '0' and '1', respectively. The signaling duration is 4 seconds. The receiver uses a filter h(t) shown in Fig. 2 s1 (t) s2(t) 0 Figure 1: Set of signals in Problem 1 h(t) 0 Figure 2: h(t) in Problem 1 (a) Determine the parameter ri for this system. HINT: Remember that ri is equal to this convolution 81(t) * h(t) evaluated...
 Prove that
using Bromwich's integral
3 = t- e-t/2, 8+1 sen(t) -1 a) 2 (s2+s+1)} - 8+1 s(s2+1 1 + sen(t) - cos(t) =
Prove that
using Bromwich's integral
3 = t- e-t/2, 8+1 sen(t) -1 a) 2 (s2+s+1)} - 8+1 s(s2+1 1 + sen(t) - cos(t) =
Most questions answered within 3 hours.
-
could someone please post clear drawings of the three structures
in the equilibrium mixture of D-glucose...
asked 2 minutes ago -
Using the Properties of Order show that 5n5 +
4n4 + 6n3 + 2n2+ n +...
asked 6 minutes ago -
What is experiential learning and how is it helpful for teaching
leadership, and interpreting group dynamics?...
asked 5 minutes ago -
A security awareness policy defines the responsibilities of
managers and information owners.
True
False
asked 7 minutes ago -
which is the equilibrium expression for the reaction
3A(g)+4B(g)<---> 2C(g)+5D(g)
asked 8 minutes ago -
Create a balanced compensation plan that you feel would
encourage a restaurant manager to be more...
asked 15 minutes ago -
Re: Human Physiology
Comment on the differences between representing V02 max as an
absolute number and...
asked 18 minutes ago -
A firm with a WACC of 10% is considering the following mutually
exclusive projects:
0
1...
asked 23 minutes ago -
. A 100.0 mL sample of 0.18 M HClO4 is titrated with 0.27 M
LiOH. Determine...
asked 46 minutes ago -
A regression equation that describes the relationship between
the amount of the bill ($) at a...
asked 1 hour ago -
exercise on VSEPR and molecular structrue.
octahedral
SeCl62-
TeCl62-
ClF62-
distorted
SeF62–
IF6–
asked 2 hours ago -
284 mL of a 0.52 M potassium hydroxide solution is added to 467
mL of a...
asked 2 hours ago