Control System Problem. Please do part A, B , and C.
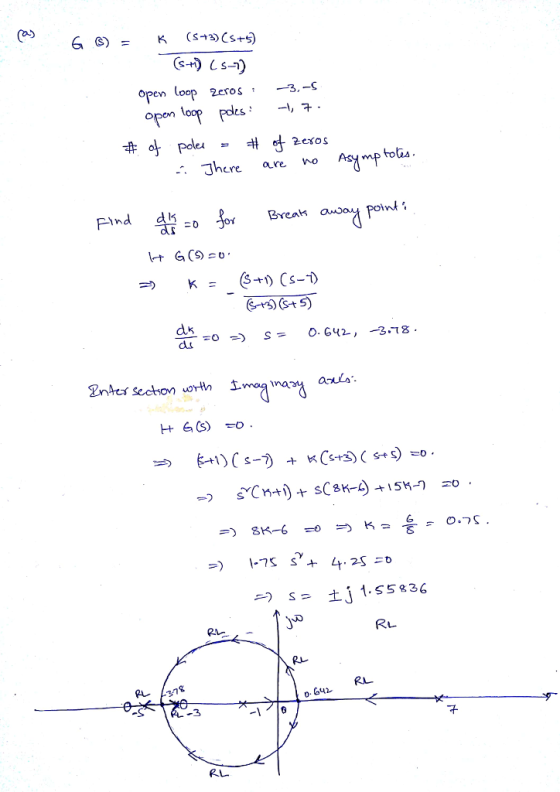
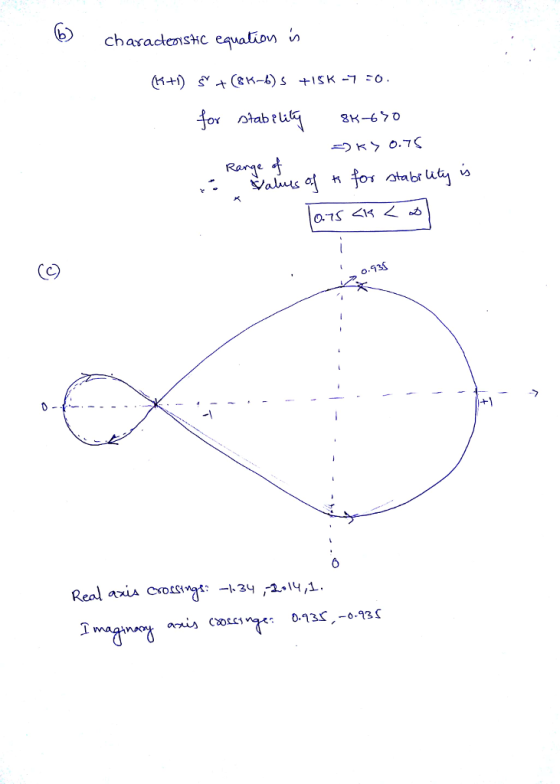
![Consider the unity-feedback system with G(s)-K(st3)(s+5)/(s+(s-7)] Sketch the root locus of this system, clearly finding any asymptotes and calculating any break-in or break-away point:s. Determine the range of gain (K) to ensure that the system is stable Draw the Nyquist diagram of this system, only considering the imaginary axis of the original RHP contour (i.e. between points A and B on the original contour). Hint: You will want to analytically find the real-axis crossings a. b. c.](http://img.homeworklib.com/questions/203ce3e0-c332-11ea-a456-915cd3a84242.png?x-oss-process=image/resize,w_560)
Homework Answers
Add Answer to:
Control System Problem. Please do part A, B , and C.
Consider the unity-feedback system with...
9. Consider a negative unity-feedback control system with the loop transfer function s +8 D(s) G(8)=K-...
 9. Consider a negative unity-feedback control system with the loop transfer function s +8 D(s) G(8)=K- s+1) ((s + 1)2 + 22 (s + 94 + 793 + 1932 +33s + 20 (a) Determine the asymptotes of the root-locus diagram for K > 0, if any. (06pts) Answer: The real-axis crossing of the asymptote(s), a = The angle(s) of the asymptote(s), 0q = _ (b) Determine the break-away and the break-in points of the root-locus diagram for K > 0,...
9. Consider a negative unity-feedback control system with the loop transfer function s +8 D(s) G(8)=K- s+1) ((s + 1)2 + 22 (s + 94 + 793 + 1932 +33s + 20 (a) Determine the asymptotes of the root-locus diagram for K > 0, if any. (06pts) Answer: The real-axis crossing of the asymptote(s), a = The angle(s) of the asymptote(s), 0q = _ (b) Determine the break-away and the break-in points of the root-locus diagram for K > 0,...
Lectures 15-18: Root-locus method 5.1 Sketch the root locus for a unity feedback system with the ...
 help on #5.2
L(s) is loop transfer function
1+L(s) = 0
lecture notes:
Lectures 15-18: Root-locus method 5.1 Sketch the root locus for a unity feedback system with the loop transfer function (8+5(+10) .2 +10+20 where K, T, and a are nonnegative parameters. For each case summarize your results in a table similar to the one provided below. Root locus parameters Open loop poles Open loop zeros Number of zeros at infinity Number of branches Number of asymptotes Center of...
help on #5.2
L(s) is loop transfer function
1+L(s) = 0
lecture notes:
Lectures 15-18: Root-locus method 5.1 Sketch the root locus for a unity feedback system with the loop transfer function (8+5(+10) .2 +10+20 where K, T, and a are nonnegative parameters. For each case summarize your results in a table similar to the one provided below. Root locus parameters Open loop poles Open loop zeros Number of zeros at infinity Number of branches Number of asymptotes Center of...
Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() =...
 Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
Sketch the root-locus plot of a unity feedback system. Determine the asymptotes of the root loci....
 Sketch the root-locus plot of a unity feedback system. Determine the asymptotes of the root loci. Find the points where root loci cross the imaginary axis and the value of at the crossing points. Find the breakaway point. K(s+9) G(s) =- H(S)=1 s(s+2) (s+5)
Sketch the root-locus plot of a unity feedback system. Determine the asymptotes of the root loci. Find the points where root loci cross the imaginary axis and the value of at the crossing points. Find the breakaway point. K(s+9) G(s) =- H(S)=1 s(s+2) (s+5)
Linear feedback systems evaluate the root locus for the unity gain negative feedback system where the...
Linear feedback systems evaluate the root locus for the unity gain negative feedback system where the feed - forward gain is G(s) = K(s+6) / s(s+1) (s+3) A. Determine and carefully draw real-line root locus and calculate the asymptotes B draw and label the root- locus. denote any angles of departure, jw-axis crossing and breakpoints
Problem 2 For the unity feedback system below in Figure 2 G(s) Figure 2. With (8+2) G(s) = (a) Sk...
 Problem 2 For the unity feedback system below in Figure 2 G(s) Figure 2. With (8+2) G(s) = (a) Sketch the root locus. 1. Draw the finite open-loop poles and zeros. ii. Draw the real-axis root locus iii. Draw the asymptotes and root locus branches. (b) Find the value of gain that will make the system marginally stable. (c) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at s...
Problem 2 For the unity feedback system below in Figure 2 G(s) Figure 2. With (8+2) G(s) = (a) Sketch the root locus. 1. Draw the finite open-loop poles and zeros. ii. Draw the real-axis root locus iii. Draw the asymptotes and root locus branches. (b) Find the value of gain that will make the system marginally stable. (c) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at s...
Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer f...
 Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer function: (a) [10 marks] K(s 4) (s + 2) is a circle, and find the centre and the radius. Determine the minimum value of the damping ratio and the corresponding value of K (b) The root locus of the open loop transfer function: [10 marks] s(s26s +15) is depicted in Figure Q1(b). Find the minimum value of gain K that will render the system...
Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer function: (a) [10 marks] K(s 4) (s + 2) is a circle, and find the centre and the radius. Determine the minimum value of the damping ratio and the corresponding value of K (b) The root locus of the open loop transfer function: [10 marks] s(s26s +15) is depicted in Figure Q1(b). Find the minimum value of gain K that will render the system...
7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s...
 7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
Problem 3 (30 points) Given the following unity feedback system we wish to sketch the root...
 Problem 3 (30 points) Given the following unity feedback system we wish to sketch the root locus of KG() = -16+-10) for 0 < K<0. (a) Indicate the following on the above s-plane (show all your works): 1) (2 points) Finite poles and zeros of G(3) ii) (2 points) real axis section of root locus i.e. real axis roots) m) (4 points) departure angles and amival angles if any iv) (4 points) Approximate breakaway and break-in points if any. v)...
Problem 3 (30 points) Given the following unity feedback system we wish to sketch the root locus of KG() = -16+-10) for 0 < K<0. (a) Indicate the following on the above s-plane (show all your works): 1) (2 points) Finite poles and zeros of G(3) ii) (2 points) real axis section of root locus i.e. real axis roots) m) (4 points) departure angles and amival angles if any iv) (4 points) Approximate breakaway and break-in points if any. v)...
Problem 5. (20pts) The open-loop transfer function of a unity feedback system G(8) -- +2) a)...
 Problem 5. (20pts) The open-loop transfer function of a unity feedback system G(8) -- +2) a) Locate open-loop zeros and open-loop poles. b) Construct the root-locus diagram as 0 <K <oo. Mark the portions of the real axis that belong to the root locus - Mark with K =0 the point where the root locus bra O the point where the root locus branches start and with K = oo the point where the branches end. - Find break-away and/or...
Problem 5. (20pts) The open-loop transfer function of a unity feedback system G(8) -- +2) a) Locate open-loop zeros and open-loop poles. b) Construct the root-locus diagram as 0 <K <oo. Mark the portions of the real axis that belong to the root locus - Mark with K =0 the point where the root locus bra O the point where the root locus branches start and with K = oo the point where the branches end. - Find break-away and/or...
 9. Consider a negative unity-feedback control system with the loop transfer function s +8 D(s) G(8)=K- s+1) ((s + 1)2 + 22 (s + 94 + 793 + 1932 +33s + 20 (a) Determine the asymptotes of the root-locus diagram for K > 0, if any. (06pts) Answer: The real-axis crossing of the asymptote(s), a = The angle(s) of the asymptote(s), 0q = _ (b) Determine the break-away and the break-in points of the root-locus diagram for K > 0,...
9. Consider a negative unity-feedback control system with the loop transfer function s +8 D(s) G(8)=K- s+1) ((s + 1)2 + 22 (s + 94 + 793 + 1932 +33s + 20 (a) Determine the asymptotes of the root-locus diagram for K > 0, if any. (06pts) Answer: The real-axis crossing of the asymptote(s), a = The angle(s) of the asymptote(s), 0q = _ (b) Determine the break-away and the break-in points of the root-locus diagram for K > 0,...
 help on #5.2
L(s) is loop transfer function
1+L(s) = 0
lecture notes:
Lectures 15-18: Root-locus method 5.1 Sketch the root locus for a unity feedback system with the loop transfer function (8+5(+10) .2 +10+20 where K, T, and a are nonnegative parameters. For each case summarize your results in a table similar to the one provided below. Root locus parameters Open loop poles Open loop zeros Number of zeros at infinity Number of branches Number of asymptotes Center of...
help on #5.2
L(s) is loop transfer function
1+L(s) = 0
lecture notes:
Lectures 15-18: Root-locus method 5.1 Sketch the root locus for a unity feedback system with the loop transfer function (8+5(+10) .2 +10+20 where K, T, and a are nonnegative parameters. For each case summarize your results in a table similar to the one provided below. Root locus parameters Open loop poles Open loop zeros Number of zeros at infinity Number of branches Number of asymptotes Center of...
 Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
 Sketch the root-locus plot of a unity feedback system. Determine the asymptotes of the root loci. Find the points where root loci cross the imaginary axis and the value of at the crossing points. Find the breakaway point. K(s+9) G(s) =- H(S)=1 s(s+2) (s+5)
Sketch the root-locus plot of a unity feedback system. Determine the asymptotes of the root loci. Find the points where root loci cross the imaginary axis and the value of at the crossing points. Find the breakaway point. K(s+9) G(s) =- H(S)=1 s(s+2) (s+5)
 Problem 2 For the unity feedback system below in Figure 2 G(s) Figure 2. With (8+2) G(s) = (a) Sketch the root locus. 1. Draw the finite open-loop poles and zeros. ii. Draw the real-axis root locus iii. Draw the asymptotes and root locus branches. (b) Find the value of gain that will make the system marginally stable. (c) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at s...
Problem 2 For the unity feedback system below in Figure 2 G(s) Figure 2. With (8+2) G(s) = (a) Sketch the root locus. 1. Draw the finite open-loop poles and zeros. ii. Draw the real-axis root locus iii. Draw the asymptotes and root locus branches. (b) Find the value of gain that will make the system marginally stable. (c) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at s...
 Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer function: (a) [10 marks] K(s 4) (s + 2) is a circle, and find the centre and the radius. Determine the minimum value of the damping ratio and the corresponding value of K (b) The root locus of the open loop transfer function: [10 marks] s(s26s +15) is depicted in Figure Q1(b). Find the minimum value of gain K that will render the system...
Q1. Show analytically that the Root Locus for the unity feedback system with open loop transfer function: (a) [10 marks] K(s 4) (s + 2) is a circle, and find the centre and the radius. Determine the minimum value of the damping ratio and the corresponding value of K (b) The root locus of the open loop transfer function: [10 marks] s(s26s +15) is depicted in Figure Q1(b). Find the minimum value of gain K that will render the system...
 7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
 Problem 3 (30 points) Given the following unity feedback system we wish to sketch the root locus of KG() = -16+-10) for 0 < K<0. (a) Indicate the following on the above s-plane (show all your works): 1) (2 points) Finite poles and zeros of G(3) ii) (2 points) real axis section of root locus i.e. real axis roots) m) (4 points) departure angles and amival angles if any iv) (4 points) Approximate breakaway and break-in points if any. v)...
Problem 3 (30 points) Given the following unity feedback system we wish to sketch the root locus of KG() = -16+-10) for 0 < K<0. (a) Indicate the following on the above s-plane (show all your works): 1) (2 points) Finite poles and zeros of G(3) ii) (2 points) real axis section of root locus i.e. real axis roots) m) (4 points) departure angles and amival angles if any iv) (4 points) Approximate breakaway and break-in points if any. v)...
 Problem 5. (20pts) The open-loop transfer function of a unity feedback system G(8) -- +2) a) Locate open-loop zeros and open-loop poles. b) Construct the root-locus diagram as 0 <K <oo. Mark the portions of the real axis that belong to the root locus - Mark with K =0 the point where the root locus bra O the point where the root locus branches start and with K = oo the point where the branches end. - Find break-away and/or...
Problem 5. (20pts) The open-loop transfer function of a unity feedback system G(8) -- +2) a) Locate open-loop zeros and open-loop poles. b) Construct the root-locus diagram as 0 <K <oo. Mark the portions of the real axis that belong to the root locus - Mark with K =0 the point where the root locus bra O the point where the root locus branches start and with K = oo the point where the branches end. - Find break-away and/or...
Most questions answered within 3 hours.
-
The specific radiocarbon activity of a sample of wood is 6.25
gms dpm/gm of carbon. The...
asked 14 seconds ago -
An aqueous magnesium chloride solution is made by dissolving
6.96 moles of MgCl2 in sufficient water...
asked 2 minutes ago -
Ken believes the average age of men who come to get a haircut at
his barber...
asked 24 minutes ago -
(Ratio Analysis): Last year Co. XYZ had sales of $ 400,000, with
“cost of goods sold”...
asked 33 minutes ago -
can someone please write the balanced chemical
equation for the synthesis of Bromoacetanilide
from;
aniline +...
asked 29 minutes ago -
1. If a corporation purchases land and building and subsequently
tears down the building and uses...
asked 40 minutes ago -
Consider a 23-year bond with 7 percent annual coupon payments.
The market rate (YTM) is 6.4...
asked 43 minutes ago -
a tuba creates a 4th harmonic of frequency 116.5 Hz. what is the
frequency of the...
asked 49 minutes ago -
A coconut mass 2kg falls from a 30m tall tree. The coconut falls
and comes to...
asked 52 minutes ago -
Group Policies
Research GROUP POLICY OBJECTS (GPO'S)
You can start in the Windows Server 2012 eBook...
asked 56 minutes ago -
software engineering
Problems.
Create a use case diagram for class registration for a
university.
Create a...
asked 56 minutes ago -
You are trying to convince your friend who wants to attend
medical school to take BY123...
asked 1 hour ago