
Homework Answers
 Thank you.
Thank you.
Add Answer to:
Problem 5. (20pts) The open-loop transfer function of a unity feedback system G(8) -- +2) a)...
2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations...
 2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations of open-loop poles with X and zeros with O on an s-plane. b. Find the number of segments in the root locus diagram based on the number of poles and zeros. c. The breakaway point (the point at which the two real poles meet and diverge to become complex conjugates) occurs when K = 0.02276. Show that the closed-loop system has repeated poles for...
2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations of open-loop poles with X and zeros with O on an s-plane. b. Find the number of segments in the root locus diagram based on the number of poles and zeros. c. The breakaway point (the point at which the two real poles meet and diverge to become complex conjugates) occurs when K = 0.02276. Show that the closed-loop system has repeated poles for...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
Problem 2 For the unity feedback system below in Figure 2 G(s) Figure 2. With (8+2) G(s) = (a) Sk...
 Problem 2 For the unity feedback system below in Figure 2 G(s) Figure 2. With (8+2) G(s) = (a) Sketch the root locus. 1. Draw the finite open-loop poles and zeros. ii. Draw the real-axis root locus iii. Draw the asymptotes and root locus branches. (b) Find the value of gain that will make the system marginally stable. (c) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at s...
Problem 2 For the unity feedback system below in Figure 2 G(s) Figure 2. With (8+2) G(s) = (a) Sketch the root locus. 1. Draw the finite open-loop poles and zeros. ii. Draw the real-axis root locus iii. Draw the asymptotes and root locus branches. (b) Find the value of gain that will make the system marginally stable. (c) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at s...
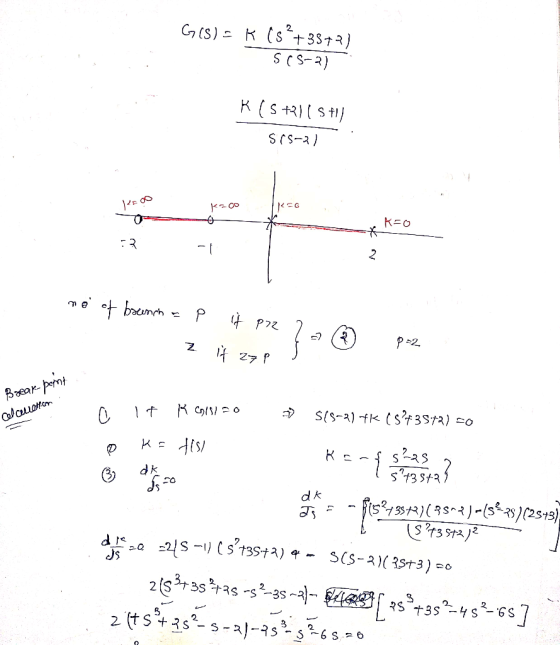
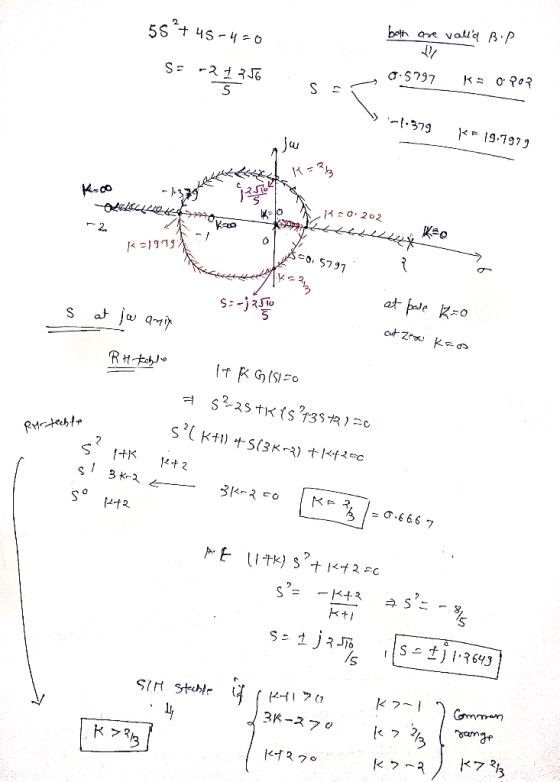
Consider the system with open-loop transfer function s+2 G(s) = k 82 4 Show the type...
 Consider the system with open-loop transfer function s+2 G(s) = k 82 4 Show the type of poles that the close-loop system has (real, imaginary, or repeated) for the different values ofk in [0 +00). Sketch the root locus of the close-loop system's poles when the gain k takes values in [0 +oo). Show clearly the break points of the loci, and calculate analytically the values that the branches of the loci are converging when k o
Consider the system with open-loop transfer function s+2 G(s) = k 82 4 Show the type of poles that the close-loop system has (real, imaginary, or repeated) for the different values ofk in [0 +00). Sketch the root locus of the close-loop system's poles when the gain k takes values in [0 +oo). Show clearly the break points of the loci, and calculate analytically the values that the branches of the loci are converging when k o
9. Consider a negative unity-feedback control system with the loop transfer function s +8 D(s) G(8)=K-...
 9. Consider a negative unity-feedback control system with the loop transfer function s +8 D(s) G(8)=K- s+1) ((s + 1)2 + 22 (s + 94 + 793 + 1932 +33s + 20 (a) Determine the asymptotes of the root-locus diagram for K > 0, if any. (06pts) Answer: The real-axis crossing of the asymptote(s), a = The angle(s) of the asymptote(s), 0q = _ (b) Determine the break-away and the break-in points of the root-locus diagram for K > 0,...
9. Consider a negative unity-feedback control system with the loop transfer function s +8 D(s) G(8)=K- s+1) ((s + 1)2 + 22 (s + 94 + 793 + 1932 +33s + 20 (a) Determine the asymptotes of the root-locus diagram for K > 0, if any. (06pts) Answer: The real-axis crossing of the asymptote(s), a = The angle(s) of the asymptote(s), 0q = _ (b) Determine the break-away and the break-in points of the root-locus diagram for K > 0,...
Due Date: April 20, 2 Problem 2: Consider a unity-feedback control system with the following open-loop...
 Due Date: April 20, 2 Problem 2: Consider a unity-feedback control system with the following open-loop transfer function: K G(s)H(s) = s(s2 + 4s + 8) 1. Sketch the root-locus plot. 2. IfK 2, where are the closed-loop poles located? 3. If x = 0.5, where are the closed-loop poles located?
Due Date: April 20, 2 Problem 2: Consider a unity-feedback control system with the following open-loop transfer function: K G(s)H(s) = s(s2 + 4s + 8) 1. Sketch the root-locus plot. 2. IfK 2, where are the closed-loop poles located? 3. If x = 0.5, where are the closed-loop poles located?
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+2...
 Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s...
 7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
3. Suppose you have a system with open-loop transfer function K(s +1) (s + 2)(8 +...
 3. Suppose you have a system with open-loop transfer function K(s +1) (s + 2)(8 + 4)(s +6) R(s) + © (3) SY(s) (a) Draw the real-axis portion of the root locus. (b) Are there break-in or break-away points? (c) If so, compute their locations. (d) Find the asymptotes of the root locus by finding the center of gravity and the asymptote angles. (e) Is the location of the center of gravity the same as the break-away point?
3. Suppose you have a system with open-loop transfer function K(s +1) (s + 2)(8 + 4)(s +6) R(s) + © (3) SY(s) (a) Draw the real-axis portion of the root locus. (b) Are there break-in or break-away points? (c) If so, compute their locations. (d) Find the asymptotes of the root locus by finding the center of gravity and the asymptote angles. (e) Is the location of the center of gravity the same as the break-away point?
R(5) " 9**** = Y($) To stabilize the unstable Open Loop system. a) Find the break...
 R(5) " 9**** = Y($) To stabilize the unstable Open Loop system. a) Find the break away / break-in point and plot the root trajectory by indicating where the root trajectory meets the imaginary axis. b) Find the range of K for which the closed-loop system is stable.
R(5) " 9**** = Y($) To stabilize the unstable Open Loop system. a) Find the break away / break-in point and plot the root trajectory by indicating where the root trajectory meets the imaginary axis. b) Find the range of K for which the closed-loop system is stable.
 2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations of open-loop poles with X and zeros with O on an s-plane. b. Find the number of segments in the root locus diagram based on the number of poles and zeros. c. The breakaway point (the point at which the two real poles meet and diverge to become complex conjugates) occurs when K = 0.02276. Show that the closed-loop system has repeated poles for...
2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations of open-loop poles with X and zeros with O on an s-plane. b. Find the number of segments in the root locus diagram based on the number of poles and zeros. c. The breakaway point (the point at which the two real poles meet and diverge to become complex conjugates) occurs when K = 0.02276. Show that the closed-loop system has repeated poles for...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
 Problem 2 For the unity feedback system below in Figure 2 G(s) Figure 2. With (8+2) G(s) = (a) Sketch the root locus. 1. Draw the finite open-loop poles and zeros. ii. Draw the real-axis root locus iii. Draw the asymptotes and root locus branches. (b) Find the value of gain that will make the system marginally stable. (c) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at s...
Problem 2 For the unity feedback system below in Figure 2 G(s) Figure 2. With (8+2) G(s) = (a) Sketch the root locus. 1. Draw the finite open-loop poles and zeros. ii. Draw the real-axis root locus iii. Draw the asymptotes and root locus branches. (b) Find the value of gain that will make the system marginally stable. (c) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at s...
 Consider the system with open-loop transfer function s+2 G(s) = k 82 4 Show the type of poles that the close-loop system has (real, imaginary, or repeated) for the different values ofk in [0 +00). Sketch the root locus of the close-loop system's poles when the gain k takes values in [0 +oo). Show clearly the break points of the loci, and calculate analytically the values that the branches of the loci are converging when k o
Consider the system with open-loop transfer function s+2 G(s) = k 82 4 Show the type of poles that the close-loop system has (real, imaginary, or repeated) for the different values ofk in [0 +00). Sketch the root locus of the close-loop system's poles when the gain k takes values in [0 +oo). Show clearly the break points of the loci, and calculate analytically the values that the branches of the loci are converging when k o
 9. Consider a negative unity-feedback control system with the loop transfer function s +8 D(s) G(8)=K- s+1) ((s + 1)2 + 22 (s + 94 + 793 + 1932 +33s + 20 (a) Determine the asymptotes of the root-locus diagram for K > 0, if any. (06pts) Answer: The real-axis crossing of the asymptote(s), a = The angle(s) of the asymptote(s), 0q = _ (b) Determine the break-away and the break-in points of the root-locus diagram for K > 0,...
9. Consider a negative unity-feedback control system with the loop transfer function s +8 D(s) G(8)=K- s+1) ((s + 1)2 + 22 (s + 94 + 793 + 1932 +33s + 20 (a) Determine the asymptotes of the root-locus diagram for K > 0, if any. (06pts) Answer: The real-axis crossing of the asymptote(s), a = The angle(s) of the asymptote(s), 0q = _ (b) Determine the break-away and the break-in points of the root-locus diagram for K > 0,...
 Due Date: April 20, 2 Problem 2: Consider a unity-feedback control system with the following open-loop transfer function: K G(s)H(s) = s(s2 + 4s + 8) 1. Sketch the root-locus plot. 2. IfK 2, where are the closed-loop poles located? 3. If x = 0.5, where are the closed-loop poles located?
Due Date: April 20, 2 Problem 2: Consider a unity-feedback control system with the following open-loop transfer function: K G(s)H(s) = s(s2 + 4s + 8) 1. Sketch the root-locus plot. 2. IfK 2, where are the closed-loop poles located? 3. If x = 0.5, where are the closed-loop poles located?
 Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
 7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
7. Consider a unity feedback control system with open-loop transfer function G(s) = k 5 s + 2)(52 + 4s + 5) Find the value of gain K > 0 for which the root locus crosses the imaginary axis.
 3. Suppose you have a system with open-loop transfer function K(s +1) (s + 2)(8 + 4)(s +6) R(s) + © (3) SY(s) (a) Draw the real-axis portion of the root locus. (b) Are there break-in or break-away points? (c) If so, compute their locations. (d) Find the asymptotes of the root locus by finding the center of gravity and the asymptote angles. (e) Is the location of the center of gravity the same as the break-away point?
3. Suppose you have a system with open-loop transfer function K(s +1) (s + 2)(8 + 4)(s +6) R(s) + © (3) SY(s) (a) Draw the real-axis portion of the root locus. (b) Are there break-in or break-away points? (c) If so, compute their locations. (d) Find the asymptotes of the root locus by finding the center of gravity and the asymptote angles. (e) Is the location of the center of gravity the same as the break-away point?
 R(5) " 9**** = Y($) To stabilize the unstable Open Loop system. a) Find the break away / break-in point and plot the root trajectory by indicating where the root trajectory meets the imaginary axis. b) Find the range of K for which the closed-loop system is stable.
R(5) " 9**** = Y($) To stabilize the unstable Open Loop system. a) Find the break away / break-in point and plot the root trajectory by indicating where the root trajectory meets the imaginary axis. b) Find the range of K for which the closed-loop system is stable.
Most questions answered within 3 hours.
-
Explain in detail
Germany is the fifth largest economy
explain what goods and services Germany specializes...
asked 3 minutes ago -
The density of platinum is 21.45 g/mL. If a cube of platinum
with a mass of...
asked 8 minutes ago -
Accounts Receivable
Sales
A/R Posting
Extended Sales Invoice
Packing Slip
Compare invoice to packing slip 2...
asked 11 minutes ago -
Michaella, age 23, is a full-time law student and is claimed by
her parents as a...
asked 12 minutes ago -
Why are polymers not typically casted into products?
asked 29 minutes ago -
When rolling a die 129 times, what is the probability of rolling
a 6 no more...
asked 46 minutes ago -
4. A call option currently sells for $7.75. It has a strike
price of $85 and...
asked 34 minutes ago -
1.
You need to prepare 10.0 liters of an acid aqueous solution with a
pH of...
asked 37 minutes ago -
Along an aggregate supply curve, if the level of output is less
than the natural level...
asked 38 minutes ago -
By 2025, annual consumption in emerging markets will total $30
trillion and contribute more than ________...
asked 43 minutes ago -
At what point does reformation cease to be a viable option for
those who are oppressed...
asked 47 minutes ago -
Place letters corresponding to amounts in the proper order for
lightest to heaviest samples:
a) 2100...
asked 51 minutes ago