
Homework Answers
![75 +12 YO! Ś (5+015+4)(8+3) het, - = $15+1)(519)5+3) 75+12 A + B +sti 5+4 st3 15+12 This > A[ sis+vis+3)(s+a)] +B[ sus+)(st33](http://img.homeworklib.com/questions/a9a8faa0-d138-11ea-bab6-cfbdf264522e.png?x-oss-process=image/resize,w_560)
![3 75+12 - WLES+25+3)(8+4)] + b[ses+01+3)(8+13) + [5(5+3) (s+)) - { $$t121543) +{{sis+y)s+43] compaye the co-efficients of](http://img.homeworklib.com/questions/aa495500-d138-11ea-9f01-41a27f184552.png?x-oss-process=image/resize,w_560)
Add Answer to:
The following control system is given U(s) E(s) 7s +12 (s+2)(+6) G() GS) At the time...
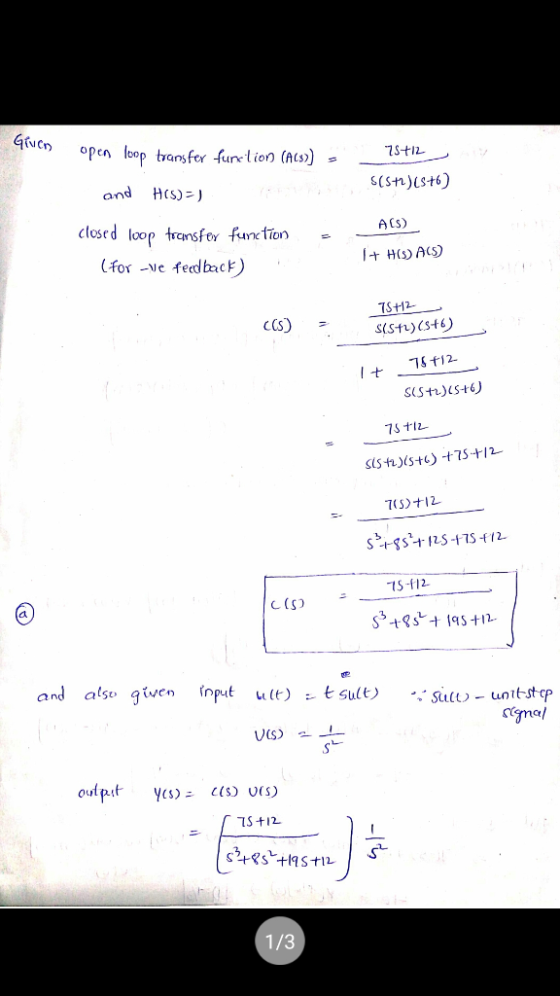
12. Consider the standard second-order system with input as shown. t u(t 2 1n. G(s) Time...
 12. Consider the standard second-order system with input as shown. t u(t 2 1n. G(s) Time (sec) a) Write the Laplace transform of the input signal. b) What is the transform of the output c Find the output of the system in time domain.
12. Consider the standard second-order system with input as shown. t u(t 2 1n. G(s) Time (sec) a) Write the Laplace transform of the input signal. b) What is the transform of the output c Find the output of the system in time domain.
QUESTION 2 (12 marks) The step response of an LTI system is given by g(t) =...
 QUESTION 2 (12 marks) The step response of an LTI system is given by g(t) = (1 - e-3t)u(t) (a) Determine the impulse response, h(t), of the system. (b) Use the linearity and time invariance properties to determine the response of the system to the input x(t) = 38(t) + 2u(t – 2). (c) Determine the frequency response of the system H(jw). [Hint: Use the tables in the formula sheet]. (d) Hence determine the output y(t) for the input signal...
QUESTION 2 (12 marks) The step response of an LTI system is given by g(t) = (1 - e-3t)u(t) (a) Determine the impulse response, h(t), of the system. (b) Use the linearity and time invariance properties to determine the response of the system to the input x(t) = 38(t) + 2u(t – 2). (c) Determine the frequency response of the system H(jw). [Hint: Use the tables in the formula sheet]. (d) Hence determine the output y(t) for the input signal...
Example 3.3.1 A control system shown in following Figure G(s)=(s+1) C(s) N(s) E(s) G,(S) R(s) S...
 Example 3.3.1 A control system shown in following Figure G(s)=(s+1) C(s) N(s) E(s) G,(S) R(s) S G2(s) 100 G2(s)= s(s+10) H(s) H(s) 1 1. If n(t) 0, r(t)=5+2t+10t?, make e 0.1, k-? 2. If n(t)=t, r(t)=5+2t+10t2, k=1, e=? sS I ess0.1, k=?. Question14 A control system shown in following Figure, obtain the steady-state error transfer function E(s)/N(s). N(s) E(S) GS C(S) G.(S) R(s) H(s) Question12 Obtain both analytically and computationally the rise time, peak time, maximum overshoot, and settling time...
Example 3.3.1 A control system shown in following Figure G(s)=(s+1) C(s) N(s) E(s) G,(S) R(s) S G2(s) 100 G2(s)= s(s+10) H(s) H(s) 1 1. If n(t) 0, r(t)=5+2t+10t?, make e 0.1, k-? 2. If n(t)=t, r(t)=5+2t+10t2, k=1, e=? sS I ess0.1, k=?. Question14 A control system shown in following Figure, obtain the steady-state error transfer function E(s)/N(s). N(s) E(S) GS C(S) G.(S) R(s) H(s) Question12 Obtain both analytically and computationally the rise time, peak time, maximum overshoot, and settling time...
QUESTION 2 Given that a control system has a forward path of G(s) and negative unity...
 QUESTION 2 Given that a control system has a forward path of G(s) and negative unity feedback and unit- step input is applied to the system. If G(s) is given as: K G(s)= s(s4) Draw the block diagram of the system. a) Derive the closed-loop transfer function of the system. b) If the gain K 6, determine the settling time of the resulting second-order system at 2% c) tolerance band Its corresponding steady state error. d) Sketch the controlled output...
QUESTION 2 Given that a control system has a forward path of G(s) and negative unity feedback and unit- step input is applied to the system. If G(s) is given as: K G(s)= s(s4) Draw the block diagram of the system. a) Derive the closed-loop transfer function of the system. b) If the gain K 6, determine the settling time of the resulting second-order system at 2% c) tolerance band Its corresponding steady state error. d) Sketch the controlled output...
Question 2 20 Marks Consider the transfer function, (6-1)(8-2) (82 7s 12)(s +13) G(s) = 1....
 Question 2 20 Marks Consider the transfer function, (6-1)(8-2) (82 7s 12)(s +13) G(s) = 1. Using direct synthesis, synthesize a biproper controller with integral action for this process The desired complementary sensitivity function is given by: (T(s)d- where r is a positive integer to be specified in the design, η1 and η2 are constants to be assigned. 2. What will be the dominant feature of the closed-loop response of the output to a step change in the set-point? Justify...
Question 2 20 Marks Consider the transfer function, (6-1)(8-2) (82 7s 12)(s +13) G(s) = 1. Using direct synthesis, synthesize a biproper controller with integral action for this process The desired complementary sensitivity function is given by: (T(s)d- where r is a positive integer to be specified in the design, η1 and η2 are constants to be assigned. 2. What will be the dominant feature of the closed-loop response of the output to a step change in the set-point? Justify...
Automatic Course.. Please answer S4 The differential equation that de s cribe Control System is given...
 Automatic Course.. Please answer
S4 The differential equation that de s cribe Control System is given as y is the system out fut and u is the where inPut signal a) Find the system resPonse yct),if the input Signal is unit step at t 2 scend Uelue b) what is the outPut
Automatic Course.. Please answer
S4 The differential equation that de s cribe Control System is given as y is the system out fut and u is the where inPut signal a) Find the system resPonse yct),if the input Signal is unit step at t 2 scend Uelue b) what is the outPut
Problem 2: (40 pts) Part A: (20pts) A third-order system has an of Y(s)-L[y(t) corresponding to...
 Problem 2: (40 pts) Part A: (20pts) A third-order system has an of Y(s)-L[y(t) corresponding to a unit step input u(t) is known to be input of u(t) and an output of y(t). The forced response portion 1 Ys) (3 +3s2+ 4s +5) = a) Determine the input-output differential equation for the system b) From your result in a), determine the transformed free response Yee (s) corresponding to initial conditions of: y(0)= y(0) = 0 and ý(0)-6 Part B (20pts)...
Problem 2: (40 pts) Part A: (20pts) A third-order system has an of Y(s)-L[y(t) corresponding to a unit step input u(t) is known to be input of u(t) and an output of y(t). The forced response portion 1 Ys) (3 +3s2+ 4s +5) = a) Determine the input-output differential equation for the system b) From your result in a), determine the transformed free response Yee (s) corresponding to initial conditions of: y(0)= y(0) = 0 and ý(0)-6 Part B (20pts)...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5...
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Control Systems 3. Y(s) Derive the transfer function G(s) = rule. U(S) of the following system...
 Control Systems
3. Y(s) Derive the transfer function G(s) = rule. U(S) of the following system using Mason's gain (18 marks) G9 G Gs Gi G2 G3 G4 GS G6 UO юү Hi H2 H3
Control Systems
3. Y(s) Derive the transfer function G(s) = rule. U(S) of the following system using Mason's gain (18 marks) G9 G Gs Gi G2 G3 G4 GS G6 UO юү Hi H2 H3
Automatic Control In unity feedback system with Gs) (s-IXs-2) With out controller, is this system stable, and why? For Gc K (proportional control) sketch the root locus. Find the range of K to mak...
 Automatic Control
In unity feedback system with Gs) (s-IXs-2) With out controller, is this system stable, and why? For Gc K (proportional control) sketch the root locus. Find the range of K to make the system stable. Determine the range of K, so that the system has no overshoot Determine the range of K for steady state error to unit step input less than 20% a) b) c) d) e)
In unity feedback system with Gs) (s-IXs-2) With out controller,...
Automatic Control
In unity feedback system with Gs) (s-IXs-2) With out controller, is this system stable, and why? For Gc K (proportional control) sketch the root locus. Find the range of K to make the system stable. Determine the range of K, so that the system has no overshoot Determine the range of K for steady state error to unit step input less than 20% a) b) c) d) e)
In unity feedback system with Gs) (s-IXs-2) With out controller,...
 12. Consider the standard second-order system with input as shown. t u(t 2 1n. G(s) Time (sec) a) Write the Laplace transform of the input signal. b) What is the transform of the output c Find the output of the system in time domain.
12. Consider the standard second-order system with input as shown. t u(t 2 1n. G(s) Time (sec) a) Write the Laplace transform of the input signal. b) What is the transform of the output c Find the output of the system in time domain.
 QUESTION 2 (12 marks) The step response of an LTI system is given by g(t) = (1 - e-3t)u(t) (a) Determine the impulse response, h(t), of the system. (b) Use the linearity and time invariance properties to determine the response of the system to the input x(t) = 38(t) + 2u(t – 2). (c) Determine the frequency response of the system H(jw). [Hint: Use the tables in the formula sheet]. (d) Hence determine the output y(t) for the input signal...
QUESTION 2 (12 marks) The step response of an LTI system is given by g(t) = (1 - e-3t)u(t) (a) Determine the impulse response, h(t), of the system. (b) Use the linearity and time invariance properties to determine the response of the system to the input x(t) = 38(t) + 2u(t – 2). (c) Determine the frequency response of the system H(jw). [Hint: Use the tables in the formula sheet]. (d) Hence determine the output y(t) for the input signal...
 Example 3.3.1 A control system shown in following Figure G(s)=(s+1) C(s) N(s) E(s) G,(S) R(s) S G2(s) 100 G2(s)= s(s+10) H(s) H(s) 1 1. If n(t) 0, r(t)=5+2t+10t?, make e 0.1, k-? 2. If n(t)=t, r(t)=5+2t+10t2, k=1, e=? sS I ess0.1, k=?. Question14 A control system shown in following Figure, obtain the steady-state error transfer function E(s)/N(s). N(s) E(S) GS C(S) G.(S) R(s) H(s) Question12 Obtain both analytically and computationally the rise time, peak time, maximum overshoot, and settling time...
Example 3.3.1 A control system shown in following Figure G(s)=(s+1) C(s) N(s) E(s) G,(S) R(s) S G2(s) 100 G2(s)= s(s+10) H(s) H(s) 1 1. If n(t) 0, r(t)=5+2t+10t?, make e 0.1, k-? 2. If n(t)=t, r(t)=5+2t+10t2, k=1, e=? sS I ess0.1, k=?. Question14 A control system shown in following Figure, obtain the steady-state error transfer function E(s)/N(s). N(s) E(S) GS C(S) G.(S) R(s) H(s) Question12 Obtain both analytically and computationally the rise time, peak time, maximum overshoot, and settling time...
 QUESTION 2 Given that a control system has a forward path of G(s) and negative unity feedback and unit- step input is applied to the system. If G(s) is given as: K G(s)= s(s4) Draw the block diagram of the system. a) Derive the closed-loop transfer function of the system. b) If the gain K 6, determine the settling time of the resulting second-order system at 2% c) tolerance band Its corresponding steady state error. d) Sketch the controlled output...
QUESTION 2 Given that a control system has a forward path of G(s) and negative unity feedback and unit- step input is applied to the system. If G(s) is given as: K G(s)= s(s4) Draw the block diagram of the system. a) Derive the closed-loop transfer function of the system. b) If the gain K 6, determine the settling time of the resulting second-order system at 2% c) tolerance band Its corresponding steady state error. d) Sketch the controlled output...
 Question 2 20 Marks Consider the transfer function, (6-1)(8-2) (82 7s 12)(s +13) G(s) = 1. Using direct synthesis, synthesize a biproper controller with integral action for this process The desired complementary sensitivity function is given by: (T(s)d- where r is a positive integer to be specified in the design, η1 and η2 are constants to be assigned. 2. What will be the dominant feature of the closed-loop response of the output to a step change in the set-point? Justify...
Question 2 20 Marks Consider the transfer function, (6-1)(8-2) (82 7s 12)(s +13) G(s) = 1. Using direct synthesis, synthesize a biproper controller with integral action for this process The desired complementary sensitivity function is given by: (T(s)d- where r is a positive integer to be specified in the design, η1 and η2 are constants to be assigned. 2. What will be the dominant feature of the closed-loop response of the output to a step change in the set-point? Justify...
 Automatic Course.. Please answer
S4 The differential equation that de s cribe Control System is given as y is the system out fut and u is the where inPut signal a) Find the system resPonse yct),if the input Signal is unit step at t 2 scend Uelue b) what is the outPut
Automatic Course.. Please answer
S4 The differential equation that de s cribe Control System is given as y is the system out fut and u is the where inPut signal a) Find the system resPonse yct),if the input Signal is unit step at t 2 scend Uelue b) what is the outPut
 Problem 2: (40 pts) Part A: (20pts) A third-order system has an of Y(s)-L[y(t) corresponding to a unit step input u(t) is known to be input of u(t) and an output of y(t). The forced response portion 1 Ys) (3 +3s2+ 4s +5) = a) Determine the input-output differential equation for the system b) From your result in a), determine the transformed free response Yee (s) corresponding to initial conditions of: y(0)= y(0) = 0 and ý(0)-6 Part B (20pts)...
Problem 2: (40 pts) Part A: (20pts) A third-order system has an of Y(s)-L[y(t) corresponding to a unit step input u(t) is known to be input of u(t) and an output of y(t). The forced response portion 1 Ys) (3 +3s2+ 4s +5) = a) Determine the input-output differential equation for the system b) From your result in a), determine the transformed free response Yee (s) corresponding to initial conditions of: y(0)= y(0) = 0 and ý(0)-6 Part B (20pts)...
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
 Control Systems
3. Y(s) Derive the transfer function G(s) = rule. U(S) of the following system using Mason's gain (18 marks) G9 G Gs Gi G2 G3 G4 GS G6 UO юү Hi H2 H3
Control Systems
3. Y(s) Derive the transfer function G(s) = rule. U(S) of the following system using Mason's gain (18 marks) G9 G Gs Gi G2 G3 G4 GS G6 UO юү Hi H2 H3
 Automatic Control
In unity feedback system with Gs) (s-IXs-2) With out controller, is this system stable, and why? For Gc K (proportional control) sketch the root locus. Find the range of K to make the system stable. Determine the range of K, so that the system has no overshoot Determine the range of K for steady state error to unit step input less than 20% a) b) c) d) e)
In unity feedback system with Gs) (s-IXs-2) With out controller,...
Automatic Control
In unity feedback system with Gs) (s-IXs-2) With out controller, is this system stable, and why? For Gc K (proportional control) sketch the root locus. Find the range of K to make the system stable. Determine the range of K, so that the system has no overshoot Determine the range of K for steady state error to unit step input less than 20% a) b) c) d) e)
In unity feedback system with Gs) (s-IXs-2) With out controller,...
Most questions answered within 3 hours.
-
Minitab Problem: Take the Lake Hume June rainfall data and find
use the processes outlined in...
asked 8 minutes ago -
X Company is trying to decide whether to continue using old
equipment to make Product A...
asked 9 minutes ago -
IN PYTHON ONLY !! Program 2: Re-work
program #5 (WeeklyHours) from the previous assignment such that...
asked 45 minutes ago -
The average length of time between arrivals at a turnpike
toll-booth is 26 seconds. What is...
asked 2 hours ago -
(a) A piston at 6.1 atm contains a gas that occupies a volume of
3.5 L....
asked 3 hours ago -
Please answer true or false. Words
cannot be changed or added in to make it true...
asked 3 hours ago -
An empty test tube weighs 15.923 grams. Then,
MgCl2•6H2O is added into the test tube. After...
asked 3 hours ago -
Assume memory access is 10 units of time and disk access is
10000 units of time....
asked 3 hours ago -
1. Are all good samples random?
2. Magazines often report surveys giving statistics such as “63%...
asked 4 hours ago -
Under all the various types of market structures, firms
must eventually earn some economic profits for...
asked 4 hours ago -
Consider the following fitness regime for a single locus trait
with two co-dominant alleles: w11 =...
asked 4 hours ago -
A large cable company reports the following.
80% of its customers subscribe to its cable TV...
asked 4 hours ago