It has the following transfer function:

-What happens to the plant with different values of ( )
(relative damping factor), also analyze how it influences if the
values of
)
(relative damping factor), also analyze how it influences if the
values of  ,
,  and
and  vary, for this implement scripts in Matlab.m and show the results
in graphs
vary, for this implement scripts in Matlab.m and show the results
in graphs
corresponding.
- Implement models of transfer functions in:
a) open loop
b) closed loop with unit feedback
b) closed loop with unit feedback and a PID controller
**DO IT IN SIMULINK
LIKE THIS:

Homework Answers



The corresponding responses are shown below
Open-loop response

Close-loop response

PID controlled response


Open-loop response

close-loop response
PID controlled response



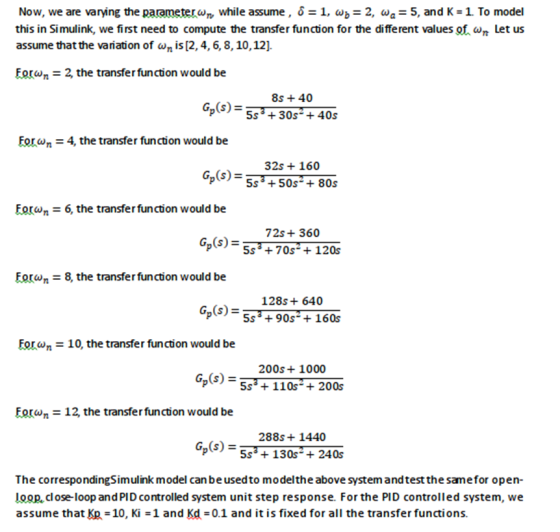
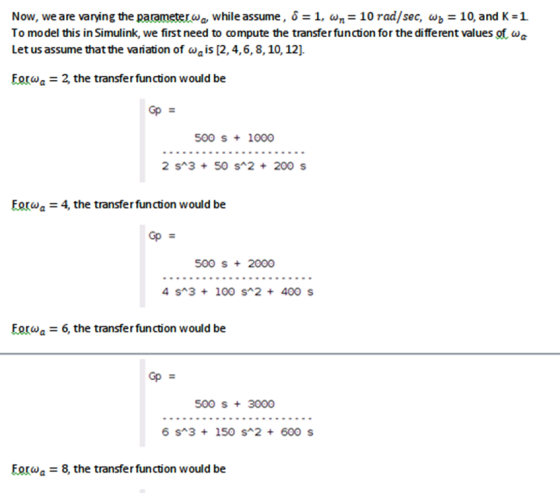
For ω_b=4, the transfer function would be
For ω_b=6, the transfer function would be

For ω_b=8, the transfer function would be

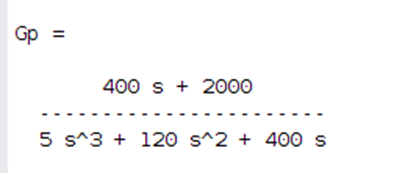
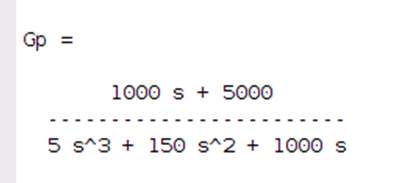
For ω_b=10, the transfer function would be
For ω_b=12, the transfer function would be

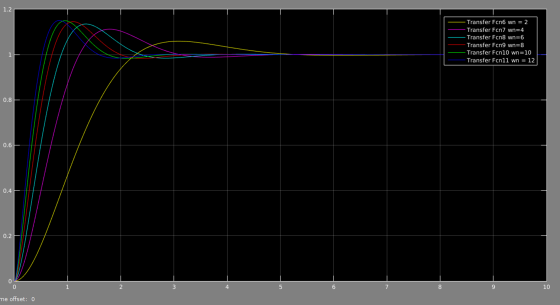
The corresponding Simulink model can be used to model the above system and test the same for open-loop, close-loop and PID controlled system unit step response. For the PID controlled system, we assume that Kp = 10, Ki = 1 and Kd = 0.1 and it is fixed for all the transfer functions.

Open-loop Response

Close-loop Response

PID controlled Response



open-loop response

Close-loop response

PID controlled response

Add Answer to:
It has the following transfer function:
-What happens to the plant with different values of ()...
It has the following transfer function: -What happens to the plant with different values of ()...
 It has the following transfer function:
-What happens to the plant with different values of ()
(relative damping factor), also analyze how it influences if the
values of
,
and
vary, for this implement scripts in Matlab.m and show the results
in graphs
corresponding.
- Implement models of transfer functions in:
a) open loop
b) closed loop with unit feedback
b) closed loop with unit feedback and a PID controller
-what are the values of
,
and
called
We were...
It has the following transfer function:
-What happens to the plant with different values of ()
(relative damping factor), also analyze how it influences if the
values of
,
and
vary, for this implement scripts in Matlab.m and show the results
in graphs
corresponding.
- Implement models of transfer functions in:
a) open loop
b) closed loop with unit feedback
b) closed loop with unit feedback and a PID controller
-what are the values of
,
and
called
We were...
Implement a PID controller to control the transfer function shown below. The PID controller and plant...
 Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
Help with SIMULINK of Matlab: I want to put the transfer function, I have already located...
 Help with SIMULINK of Matlab:
I want to put the transfer function, I have already located
function # 1, but how do I put function 2, so that it comes out as
well as the original function, what should I put in the numerator
and denominator? ..
Block Parameters: Transfer Fcn5 Х Transfer Fon Function1: K*wn^2 S2+2*zhita*wns The numerator coefficient can be a vector or matrix expression. The denominator coefficient must be a vector. The output width equals the number...
Help with SIMULINK of Matlab:
I want to put the transfer function, I have already located
function # 1, but how do I put function 2, so that it comes out as
well as the original function, what should I put in the numerator
and denominator? ..
Block Parameters: Transfer Fcn5 Х Transfer Fon Function1: K*wn^2 S2+2*zhita*wns The numerator coefficient can be a vector or matrix expression. The denominator coefficient must be a vector. The output width equals the number...
Help with SIMULINK of Matlab: I want to put the transfer function,, but how do I...
 Help with SIMULINK of Matlab:
I want to put the transfer function,, but how do I put function 2,
so that it comes out as well as the original function, what should
I put in the numerator and denominator? ..
I know that I cannot use the constant (s) in the block,
for that reason I find it difficult to put that equation in the
block and the program works for me!
PLease, write clearly the final answer for numerator...
Help with SIMULINK of Matlab:
I want to put the transfer function,, but how do I put function 2,
so that it comes out as well as the original function, what should
I put in the numerator and denominator? ..
I know that I cannot use the constant (s) in the block,
for that reason I find it difficult to put that equation in the
block and the program works for me!
PLease, write clearly the final answer for numerator...
Consider the feedback sy PID COntroller Plant R(S) Y(s) the closed-loop transfer function T(s) = Y...
 Consider the feedback sy PID COntroller Plant R(S) Y(s) the closed-loop transfer function T(s) = Y controller (Kp Find er p 1, Ks K ) and show that the system is marginally stable with two imaginary roots. (s)/R(s) with no sabl thosed-loop transfer function T(s) Y (S/R(s) with the (three- term) PID controller added to stabilize the system. suming that Kd 4 and K, -100, find the values (range) of Kp that will stabilize the system.
Consider the feedback sy PID COntroller Plant R(S) Y(s) the closed-loop transfer function T(s) = Y controller (Kp Find er p 1, Ks K ) and show that the system is marginally stable with two imaginary roots. (s)/R(s) with no sabl thosed-loop transfer function T(s) Y (S/R(s) with the (three- term) PID controller added to stabilize the system. suming that Kd 4 and K, -100, find the values (range) of Kp that will stabilize the system.
I have no more posting for this month, please solve these for me thanks 1. Given...
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%....
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Required Plant Transfer Function! 사, (H183) 3. Design the proportional (Kp) and derivative (Ka) ...
 I need help with the following:
Required Plant Transfer Function! 사, (H183) 3. Design the proportional (Kp) and derivative (Ka) coefficients for a controller in Propotional- Derivative with Derivative on Output Only (PD-DOO) form. (Fig. 4). T(t) Gp(s) Figure 4: Proportional-Derivative closed loop control with Derivative-on-Output-Only Derive the closed loop transfer function, G2(s). Let the desired specifications of the compensated, closed loop system be wn 12 and-0.6 -In this configuration the known parameters are J, c, wn and Ç. Determine...
I need help with the following:
Required Plant Transfer Function! 사, (H183) 3. Design the proportional (Kp) and derivative (Ka) coefficients for a controller in Propotional- Derivative with Derivative on Output Only (PD-DOO) form. (Fig. 4). T(t) Gp(s) Figure 4: Proportional-Derivative closed loop control with Derivative-on-Output-Only Derive the closed loop transfer function, G2(s). Let the desired specifications of the compensated, closed loop system be wn 12 and-0.6 -In this configuration the known parameters are J, c, wn and Ç. Determine...
Exercise: Given the mass-damper-spring network below: x(t) flt) m- 1kg; X(s) F(s) (s2 +10s + 20) ...
 Exercise: Given the mass-damper-spring network below: x(t) flt) m- 1kg; X(s) F(s) (s2 +10s + 20) b-10N-m/s 20N/m; f(t)-1 N Show how each of the controller gain, Kp, Kd and Ki contributes to obtain Fast rise time Minimum overshoot i. No steady state error MATLAB code S-tf('s') Sys 1/(sA2+10*s+20) Step Proportional Controller: Kp 300 % for faster reponse Gpspid(Кр) sys_p-feedback(sys Gp, 1) t-0:0.01:2 step(sys, sys p) Proportional-Derivative Controller: Kp 300 Kd-10 Gpdspid(Kp,0,Kd) sys pd feedback(Gpd sys, 1) step( sys, sys_p,...
Exercise: Given the mass-damper-spring network below: x(t) flt) m- 1kg; X(s) F(s) (s2 +10s + 20) b-10N-m/s 20N/m; f(t)-1 N Show how each of the controller gain, Kp, Kd and Ki contributes to obtain Fast rise time Minimum overshoot i. No steady state error MATLAB code S-tf('s') Sys 1/(sA2+10*s+20) Step Proportional Controller: Kp 300 % for faster reponse Gpspid(Кр) sys_p-feedback(sys Gp, 1) t-0:0.01:2 step(sys, sys p) Proportional-Derivative Controller: Kp 300 Kd-10 Gpdspid(Kp,0,Kd) sys pd feedback(Gpd sys, 1) step( sys, sys_p,...
SIMULINK the first function is already simplified and located in the block: NOw,I have problem with...
 SIMULINK
the first function is already simplified and located in the
block:
NOw,I have problem with function # 2,I need help to properly put
function # 2 in the simulink "trnafer fcn5 'block, ... I cannot add
the letter' s' in neither the numerator nor the denominator,
because since I already have a script code, it only calls the
matlab.m file.That is why '0' or '1' is used in this case to call
the code 's' variable. m
if I...
SIMULINK
the first function is already simplified and located in the
block:
NOw,I have problem with function # 2,I need help to properly put
function # 2 in the simulink "trnafer fcn5 'block, ... I cannot add
the letter' s' in neither the numerator nor the denominator,
because since I already have a script code, it only calls the
matlab.m file.That is why '0' or '1' is used in this case to call
the code 's' variable. m
if I...
 It has the following transfer function:
-What happens to the plant with different values of ()
(relative damping factor), also analyze how it influences if the
values of
,
and
vary, for this implement scripts in Matlab.m and show the results
in graphs
corresponding.
- Implement models of transfer functions in:
a) open loop
b) closed loop with unit feedback
b) closed loop with unit feedback and a PID controller
-what are the values of
,
and
called
We were...
It has the following transfer function:
-What happens to the plant with different values of ()
(relative damping factor), also analyze how it influences if the
values of
,
and
vary, for this implement scripts in Matlab.m and show the results
in graphs
corresponding.
- Implement models of transfer functions in:
a) open loop
b) closed loop with unit feedback
b) closed loop with unit feedback and a PID controller
-what are the values of
,
and
called
We were...
 Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
 Help with SIMULINK of Matlab:
I want to put the transfer function, I have already located
function # 1, but how do I put function 2, so that it comes out as
well as the original function, what should I put in the numerator
and denominator? ..
Block Parameters: Transfer Fcn5 Х Transfer Fon Function1: K*wn^2 S2+2*zhita*wns The numerator coefficient can be a vector or matrix expression. The denominator coefficient must be a vector. The output width equals the number...
Help with SIMULINK of Matlab:
I want to put the transfer function, I have already located
function # 1, but how do I put function 2, so that it comes out as
well as the original function, what should I put in the numerator
and denominator? ..
Block Parameters: Transfer Fcn5 Х Transfer Fon Function1: K*wn^2 S2+2*zhita*wns The numerator coefficient can be a vector or matrix expression. The denominator coefficient must be a vector. The output width equals the number...
 Help with SIMULINK of Matlab:
I want to put the transfer function,, but how do I put function 2,
so that it comes out as well as the original function, what should
I put in the numerator and denominator? ..
I know that I cannot use the constant (s) in the block,
for that reason I find it difficult to put that equation in the
block and the program works for me!
PLease, write clearly the final answer for numerator...
Help with SIMULINK of Matlab:
I want to put the transfer function,, but how do I put function 2,
so that it comes out as well as the original function, what should
I put in the numerator and denominator? ..
I know that I cannot use the constant (s) in the block,
for that reason I find it difficult to put that equation in the
block and the program works for me!
PLease, write clearly the final answer for numerator...
 Consider the feedback sy PID COntroller Plant R(S) Y(s) the closed-loop transfer function T(s) = Y controller (Kp Find er p 1, Ks K ) and show that the system is marginally stable with two imaginary roots. (s)/R(s) with no sabl thosed-loop transfer function T(s) Y (S/R(s) with the (three- term) PID controller added to stabilize the system. suming that Kd 4 and K, -100, find the values (range) of Kp that will stabilize the system.
Consider the feedback sy PID COntroller Plant R(S) Y(s) the closed-loop transfer function T(s) = Y controller (Kp Find er p 1, Ks K ) and show that the system is marginally stable with two imaginary roots. (s)/R(s) with no sabl thosed-loop transfer function T(s) Y (S/R(s) with the (three- term) PID controller added to stabilize the system. suming that Kd 4 and K, -100, find the values (range) of Kp that will stabilize the system.
 I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
I have no more posting for this month, please solve these for me
thanks
1. Given the following unity feedback system where s+z s2 (s + 10) and the controller is a proportional controller Ge = K, do the following: a. If z = 2, find K so that the damped frequency of the oscillation of the transient response is 5 rad/s. b. The system is to be redesigned by changing the values of z and K. If the new...
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
 I need help with the following:
Required Plant Transfer Function! 사, (H183) 3. Design the proportional (Kp) and derivative (Ka) coefficients for a controller in Propotional- Derivative with Derivative on Output Only (PD-DOO) form. (Fig. 4). T(t) Gp(s) Figure 4: Proportional-Derivative closed loop control with Derivative-on-Output-Only Derive the closed loop transfer function, G2(s). Let the desired specifications of the compensated, closed loop system be wn 12 and-0.6 -In this configuration the known parameters are J, c, wn and Ç. Determine...
I need help with the following:
Required Plant Transfer Function! 사, (H183) 3. Design the proportional (Kp) and derivative (Ka) coefficients for a controller in Propotional- Derivative with Derivative on Output Only (PD-DOO) form. (Fig. 4). T(t) Gp(s) Figure 4: Proportional-Derivative closed loop control with Derivative-on-Output-Only Derive the closed loop transfer function, G2(s). Let the desired specifications of the compensated, closed loop system be wn 12 and-0.6 -In this configuration the known parameters are J, c, wn and Ç. Determine...
 Exercise: Given the mass-damper-spring network below: x(t) flt) m- 1kg; X(s) F(s) (s2 +10s + 20) b-10N-m/s 20N/m; f(t)-1 N Show how each of the controller gain, Kp, Kd and Ki contributes to obtain Fast rise time Minimum overshoot i. No steady state error MATLAB code S-tf('s') Sys 1/(sA2+10*s+20) Step Proportional Controller: Kp 300 % for faster reponse Gpspid(Кр) sys_p-feedback(sys Gp, 1) t-0:0.01:2 step(sys, sys p) Proportional-Derivative Controller: Kp 300 Kd-10 Gpdspid(Kp,0,Kd) sys pd feedback(Gpd sys, 1) step( sys, sys_p,...
Exercise: Given the mass-damper-spring network below: x(t) flt) m- 1kg; X(s) F(s) (s2 +10s + 20) b-10N-m/s 20N/m; f(t)-1 N Show how each of the controller gain, Kp, Kd and Ki contributes to obtain Fast rise time Minimum overshoot i. No steady state error MATLAB code S-tf('s') Sys 1/(sA2+10*s+20) Step Proportional Controller: Kp 300 % for faster reponse Gpspid(Кр) sys_p-feedback(sys Gp, 1) t-0:0.01:2 step(sys, sys p) Proportional-Derivative Controller: Kp 300 Kd-10 Gpdspid(Kp,0,Kd) sys pd feedback(Gpd sys, 1) step( sys, sys_p,...
 SIMULINK
the first function is already simplified and located in the
block:
NOw,I have problem with function # 2,I need help to properly put
function # 2 in the simulink "trnafer fcn5 'block, ... I cannot add
the letter' s' in neither the numerator nor the denominator,
because since I already have a script code, it only calls the
matlab.m file.That is why '0' or '1' is used in this case to call
the code 's' variable. m
if I...
SIMULINK
the first function is already simplified and located in the
block:
NOw,I have problem with function # 2,I need help to properly put
function # 2 in the simulink "trnafer fcn5 'block, ... I cannot add
the letter' s' in neither the numerator nor the denominator,
because since I already have a script code, it only calls the
matlab.m file.That is why '0' or '1' is used in this case to call
the code 's' variable. m
if I...
Most questions answered within 3 hours.
-
3) What are the typical social structures in a global city?
asked 2 hours ago -
Luther Corporation
Consolidated Balance Sheet
December 31, 2019 and 2018 (in $ millions)
Assets
2019
2018...
asked 2 hours ago -
(Expected rate of return and risk) Carter Inc. is evaluating a
security. Calculate the investment’s expected...
asked 4 hours ago -
What specific indicators can point to lack of progress for
African Americans in American society?
asked 5 hours ago -
1-The Electrons in a beam are moving at 2.7×108 m/s in an
electric field of 15000...
asked 6 hours ago -
A gas tank is a vertical cylinder. It has a radius of 1m, a
height of...
asked 6 hours ago -
Accent Software faces the following conditions. All of these
support Accent’s use of a market-penetration pricing...
asked 7 hours ago -
A mathematically inclined friend emails you the following
instructions: "Meet me in the cafeteria the first...
asked 7 hours ago -
A monopoly sells in two countries . The demand curves in the two
countries are p1...
asked 8 hours ago -
A .15kg rubber ball is bounced off a wall. Before hitting the
wall, the ball moves...
asked 9 hours ago -
A manufacturing company preparing to build a new plant is
considering three potential locations for it....
asked 9 hours ago -
B. If compound Y has approximately the same values of solubility
in toluene as compound X,...
asked 9 hours ago