It has the following transfer function:

-What happens to the plant with different values of ( )
(relative damping factor), also analyze how it influences if the
values of
)
(relative damping factor), also analyze how it influences if the
values of  ,
,  and
and  vary, for this implement scripts in Matlab.m and show the results
in graphs
vary, for this implement scripts in Matlab.m and show the results
in graphs
corresponding.
- Implement models of transfer functions in:
a) open loop
b) closed loop with unit feedback
b) closed loop with unit feedback and a PID controller
-what are the values of
,
and
called
Homework Answers
clear all
clc
s = tf('s');
%% model the system
wn = 1; % in rad/sec
wb = 2;
wa = 5;
K = 1;
% Varying the parameter zeta
zeta = [0;0.2;0.4;0.8;1];
% time of simulation
time = 0:0.1:10;
% control input
u = ones(1,length(time));
for i = 1:length(zeta)
% model the transfer function
Gp = (K*(s/wa + 1)*wn^2)/(s*(s +
2*zeta(i)*wn)*(s/wb + 1));
% compute the open-loop TF for step input
[y,t] = lsim(Gp,u,time);
y_ol(:,i) = y;
% model the close-loop TF with unity
feedback
Tp = feedback(Gp,1);
% compute the close-loop TF for step input
[y_c,t_c] = lsim(Tp,u,time);
y_cl(:,i) = y_c;
% PID controller TF
Kp = 10;
Ki = 1;
Kd = 0.1;
Gc = pid(Kp,Ki,Kd);
% model the close-loop TF with PID
controller
Tpid = feedback(Gp*Gc,1);
% compute the PID controlled close-loop TF for
step input
[y_p,t_p] = lsim(Tpid,u,time);
y_pid(:,i) = y_p;
end
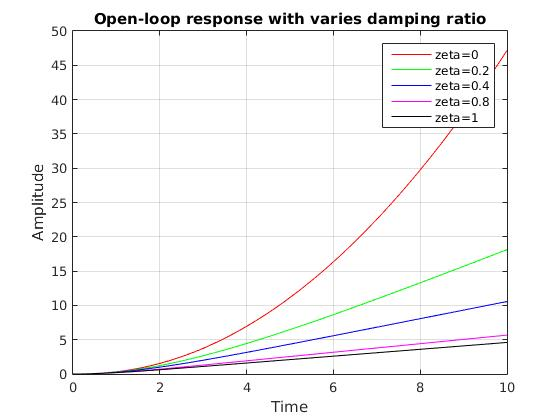
% plot the open-loop response
figure(1)
plot(time,y_ol(:,1),'r')
hold on
plot(time,y_ol(:,2),'g')
hold on
plot(time,y_ol(:,3),'b')
hold on
plot(time,y_ol(:,4),'m')
hold on
plot(time,y_ol(:,5),'k')
grid
xlabel('Time')
ylabel('Amplitude')
legend('zeta=0','zeta=0.2','zeta=0.4','zeta=0.8','zeta=1')
title('Open-loop response with varies damping ratio')
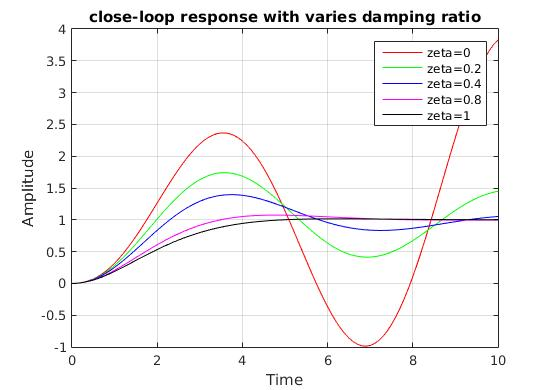
% plot the close-loop response
figure(2)
plot(time,y_cl(:,1),'r')
hold on
plot(time,y_cl(:,2),'g')
hold on
plot(time,y_cl(:,3),'b')
hold on
plot(time,y_cl(:,4),'m')
hold on
plot(time,y_cl(:,5),'k')
grid
xlabel('Time')
ylabel('Amplitude')
legend('zeta=0','zeta=0.2','zeta=0.4','zeta=0.8','zeta=1')
title('close-loop response with varies damping ratio')
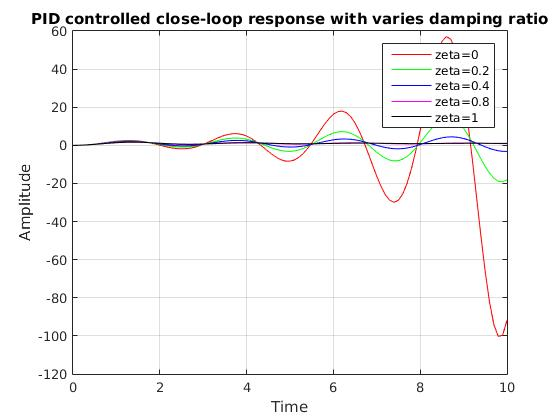
% plot the PID controlled close-loop response
figure(3)
plot(time,y_pid(:,1),'r')
hold on
plot(time,y_pid(:,2),'g')
hold on
plot(time,y_pid(:,3),'b')
hold on
plot(time,y_pid(:,4),'m')
hold on
plot(time,y_pid(:,5),'k')
grid
xlabel('Time')
ylabel('Amplitude')
legend('zeta=0','zeta=0.2','zeta=0.4','zeta=0.8','zeta=1')
title('PID controlled close-loop response with varies damping
ratio')

clear all
clc
s = tf('s');
%% model the system
zeta = 1; % damping ratio
wb = 2;
wa = 5;
K = 1;
% Varying the parameter wn
wn = [0;2;4;8;10];
% time of simulation
time = 0:0.1:10;
% control input
u = ones(1,length(time));
for i = 1:length(wn)
% model the trnasfer function
Gp = (K*(s/wa + 1)*wn(i)^2)/(s*(s +
2*zeta*wn(i))*(s/wb + 1));
% compute the open-loop TF for step input
[y,t] = lsim(Gp,u,time);
y_ol(:,i) = y;
% model the close-loop TF with unity
feedback
Tp = feedback(Gp,1);
% compute the close-loop TF for step input
[y_c,t_c] = lsim(Tp,u,time);
y_cl(:,i) = y_c;
% PID controller TF
Kp = 10;
Ki = 1;
Kd = 0.1;
Gc = pid(Kp,Ki,Kd);
% model the close-loop TF with PID
controller
Tpid = feedback(Gp*Gc,1);
% compute the PID controlled close-loop TF for
step input
[y_p,t_p] = lsim(Tpid,u,time);
y_pid(:,i) = y_p;
end
% plot the open-loop response
figure(1)
plot(time,y_ol(:,1),'r')
hold on
plot(time,y_ol(:,2),'g')
hold on
plot(time,y_ol(:,3),'b')
hold on
plot(time,y_ol(:,4),'m')
hold on
plot(time,y_ol(:,5),'k')
grid
xlabel('Time')
ylabel('Amplitude')
legend('wn=0','wn=2','wn=4','wn=8','wn=10')
title('Open-loop response with varies wn')
% plot the close-loop response
figure(2)
plot(time,y_cl(:,1),'r')
hold on
plot(time,y_cl(:,2),'g')
hold on
plot(time,y_cl(:,3),'b')
hold on
plot(time,y_cl(:,4),'m')
hold on
plot(time,y_cl(:,5),'k')
grid
xlabel('Time')
ylabel('Amplitude')
legend('wn=0','wn=2','wn=4','wn=8','wn=10')
title('close-loop response with varies wn')
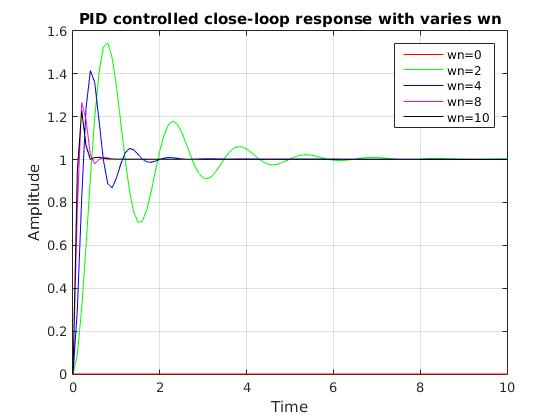
% plot the PID controlled close-loop response
figure(3)
plot(time,y_pid(:,1),'r')
hold on
plot(time,y_pid(:,2),'g')
hold on
plot(time,y_pid(:,3),'b')
hold on
plot(time,y_pid(:,4),'m')
hold on
plot(time,y_pid(:,5),'k')
grid
xlabel('Time')
ylabel('Amplitude')
legend('wn=0','wn=2','wn=4','wn=8','wn=10')
title('PID controlled close-loop response with varies wn')
The corresponding plots are shown below



clear all
clc
s = tf('s');
%% model the system
zeta = 1; % damping ratio
wn = 10; % rad/sec
wa = 5;
K = 1;
% Varying the parameter wb
wb = [1;2;4;8;10];
% time of simulation
time = 0:0.1:10;
% control input
u = ones(1,length(time));
for i = 1:length(wb)
% model the trnasfer function
Gp = (K*(s/wa + 1)*wn^2)/(s*(s +
2*zeta*wn)*(s/wb(i) + 1));
% compute the open-loop TF for step input
[y,t] = lsim(Gp,u,time);
y_ol(:,i) = y;
% model the close-loop TF with unity
feedback
Tp = feedback(Gp,1);
% compute the close-loop TF for step input
[y_c,t_c] = lsim(Tp,u,time);
y_cl(:,i) = y_c;
% PID controller TF
Kp = 10;
Ki = 1;
Kd = 0.1;
Gc = pid(Kp,Ki,Kd);
% model the close-loop TF with PID
controller
Tpid = feedback(Gp*Gc,1);
% compute the PID controlled close-loop TF for
step input
[y_p,t_p] = lsim(Tpid,u,time);
y_pid(:,i) = y_p;
end
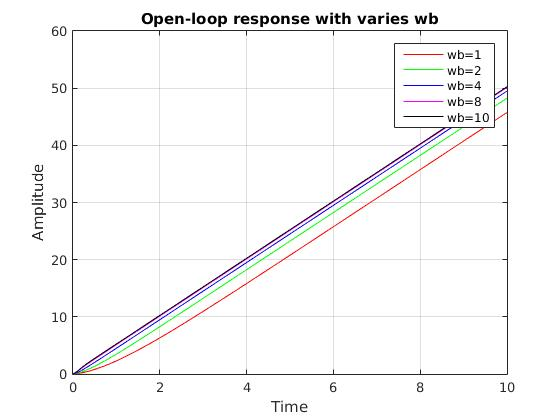
% plot the open-loop response
figure(1)
plot(time,y_ol(:,1),'r')
hold on
plot(time,y_ol(:,2),'g')
hold on
plot(time,y_ol(:,3),'b')
hold on
plot(time,y_ol(:,4),'m')
hold on
plot(time,y_ol(:,5),'k')
grid
xlabel('Time')
ylabel('Amplitude')
legend('wb=1','wb=2','wb=4','wb=8','wb=10')
title('Open-loop response with varies wb')
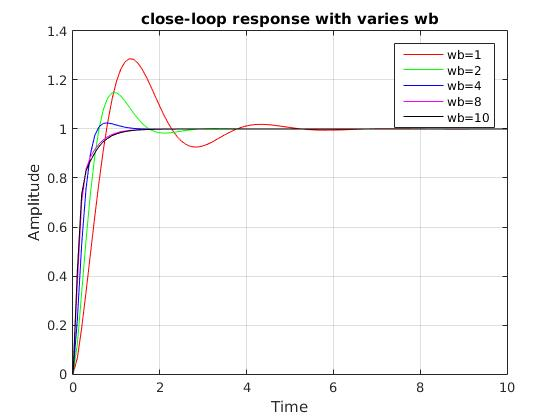
% plot the close-loop response
figure(2)
plot(time,y_cl(:,1),'r')
hold on
plot(time,y_cl(:,2),'g')
hold on
plot(time,y_cl(:,3),'b')
hold on
plot(time,y_cl(:,4),'m')
hold on
plot(time,y_cl(:,5),'k')
grid
xlabel('Time')
ylabel('Amplitude')
legend('wb=1','wb=2','wb=4','wb=8','wb=10')
title('close-loop response with varies wb')
% plot the PID controlled close-loop response
figure(3)
plot(time,y_pid(:,1),'r')
hold on
plot(time,y_pid(:,2),'g')
hold on
plot(time,y_pid(:,3),'b')
hold on
plot(time,y_pid(:,4),'m')
hold on
plot(time,y_pid(:,5),'k')
grid
xlabel('Time')
ylabel('Amplitude')
legend('wb=1','wb=2','wb=4','wb=8','wb=10')
title('PID controlled close-loop response with varies wb')
The corresponding responses are shown below


clear all
clc
s = tf('s');
%% model the system
zeta = 1; % damping ratio
wn = 10; % rad/sec
wb = 5;
K = 1;
% Varying the parameter wb
wa = [2;4;6;8;10];
% time of simulation
time = 0:0.1:10;
% control input
u = ones(1,length(time));
for i = 1:length(wa)
% model the trnasfer function
Gp = (K*(s/wa(i) + 1)*wn^2)/(s*(s +
2*zeta*wn)*(s/wb + 1));
% compute the open-loop TF for step input
[y,t] = lsim(Gp,u,time);
y_ol(:,i) = y;
% model the close-loop TF with unity
feedback
Tp = feedback(Gp,1);
% compute the close-loop TF for step input
[y_c,t_c] = lsim(Tp,u,time);
y_cl(:,i) = y_c;
% PID controller TF
Kp = 10;
Ki = 1;
Kd = 0.1;
Gc = pid(Kp,Ki,Kd);
% model the close-loop TF with PID
controller
Tpid = feedback(Gp*Gc,1);
% compute the PID controlled close-loop TF for
step input
[y_p,t_p] = lsim(Tpid,u,time);
y_pid(:,i) = y_p;
end
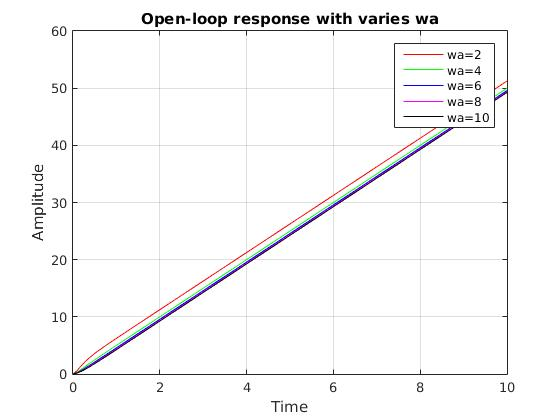
% plot the open-loop response
figure(1)
plot(time,y_ol(:,1),'r')
hold on
plot(time,y_ol(:,2),'g')
hold on
plot(time,y_ol(:,3),'b')
hold on
plot(time,y_ol(:,4),'m')
hold on
plot(time,y_ol(:,5),'k')
grid
xlabel('Time')
ylabel('Amplitude')
legend('wa=2','wa=4','wa=6','wa=8','wa=10')
title('Open-loop response with varies wa')
% plot the close-loop response
figure(2)
plot(time,y_cl(:,1),'r')
hold on
plot(time,y_cl(:,2),'g')
hold on
plot(time,y_cl(:,3),'b')
hold on
plot(time,y_cl(:,4),'m')
hold on
plot(time,y_cl(:,5),'k')
grid
xlabel('Time')
ylabel('Amplitude')
legend('wa=2','wa=4','wa=6','wa=8','wa=10')
title('close-loop response with varies wa')
% plot the PID controlled close-loop response
figure(3)
plot(time,y_pid(:,1),'r')
hold on
plot(time,y_pid(:,2),'g')
hold on
plot(time,y_pid(:,3),'b')
hold on
plot(time,y_pid(:,4),'m')
hold on
plot(time,y_pid(:,5),'k')
grid
xlabel('Time')
ylabel('Amplitude')
legend('wa=2','wa=4','wa=6','wa=8','wa=10')
title('PID controlled close-loop response with varies wa')
The corresponding responses are shown below

Here, Where δ is the damping ratio, ωn is the natural damping frequency, ωb is the location of a pole and ωa is the location of zero of the system.
Add Answer to:
It has the following transfer function:
-What happens to the plant with different values of ()...
It has the following transfer function: -What happens to the plant with different values of ()...
 It has the following transfer function:
-What happens to the plant with different values of ()
(relative damping factor), also analyze how it influences if the
values of
,
and
vary, for this implement scripts in Matlab.m and show the results
in graphs
corresponding.
- Implement models of transfer functions in:
a) open loop
b) closed loop with unit feedback
b) closed loop with unit feedback and a PID controller
**DO IT IN SIMULINK
LIKE THIS:
2 Gp(s) K* (+1)...
It has the following transfer function:
-What happens to the plant with different values of ()
(relative damping factor), also analyze how it influences if the
values of
,
and
vary, for this implement scripts in Matlab.m and show the results
in graphs
corresponding.
- Implement models of transfer functions in:
a) open loop
b) closed loop with unit feedback
b) closed loop with unit feedback and a PID controller
**DO IT IN SIMULINK
LIKE THIS:
2 Gp(s) K* (+1)...
Implement a PID controller to control the transfer function shown below. The PID controller and plant...
 Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
7. For a negative feedback control system with unit feedback gain, its open-loop 100 transfer function...
 7. For a negative feedback control system with unit feedback gain, its open-loop 100 transfer function is G (s) Design a PID controller, so that the open s(10s) corresponding closed-loop poles are -2+jl and -5. (10 scores)
7. For a negative feedback control system with unit feedback gain, its open-loop 100 transfer function is G (s) Design a PID controller, so that the open s(10s) corresponding closed-loop poles are -2+jl and -5. (10 scores)
7. For a negative feedback control system with unit feedback gain, its open-loop 100 transfer function is G (s) Design a PID controller, so that the open s(10s) corresponding closed-loop poles are -2+jl and -5. (10 scores)
7. For a negative feedback control system with unit feedback gain, its open-loop 100 transfer function is G (s) Design a PID controller, so that the open s(10s) corresponding closed-loop poles are -2+jl and -5. (10 scores)
4.35 Consider the feedback control system with the plant transfer function G(s) = (5+0.1)(5+0.5) (a) Design...
 4.35 Consider the feedback control system with the plant transfer function G(s) = (5+0.1)(5+0.5) (a) Design a proportional controller so the closed-loop system has damping of 5 = 0.707. Under what conditions on kp is the closed-loop system stable? (b) Design a PI controller so that the closed-loop system has no over- shoot. Under what conditions on (kp, kt) is the closed-loop system is stable? (©) Design a PID controller such that the settling time is less than 1.7 sec.
4.35 Consider the feedback control system with the plant transfer function G(s) = (5+0.1)(5+0.5) (a) Design a proportional controller so the closed-loop system has damping of 5 = 0.707. Under what conditions on kp is the closed-loop system stable? (b) Design a PI controller so that the closed-loop system has no over- shoot. Under what conditions on (kp, kt) is the closed-loop system is stable? (©) Design a PID controller such that the settling time is less than 1.7 sec.
PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s)...
 PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%....
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Consider the feedback sy PID COntroller Plant R(S) Y(s) the closed-loop transfer function T(s) = Y...
 Consider the feedback sy PID COntroller Plant R(S) Y(s) the closed-loop transfer function T(s) = Y controller (Kp Find er p 1, Ks K ) and show that the system is marginally stable with two imaginary roots. (s)/R(s) with no sabl thosed-loop transfer function T(s) Y (S/R(s) with the (three- term) PID controller added to stabilize the system. suming that Kd 4 and K, -100, find the values (range) of Kp that will stabilize the system.
Consider the feedback sy PID COntroller Plant R(S) Y(s) the closed-loop transfer function T(s) = Y controller (Kp Find er p 1, Ks K ) and show that the system is marginally stable with two imaginary roots. (s)/R(s) with no sabl thosed-loop transfer function T(s) Y (S/R(s) with the (three- term) PID controller added to stabilize the system. suming that Kd 4 and K, -100, find the values (range) of Kp that will stabilize the system.
show steps please 10 A second-order open-loop system with transfer function G(s) = is to be...
 show steps please
10 A second-order open-loop system with transfer function G(s) = is to be $2+45+10 controlled with unity negative feedback. (a) Derive the error transfer functions E(s) of the closed-loop system subjected to a unit step input, when using a P controller and a PI controller, respectively, in terms P control gain kp, and PI control gains kp and ki, respectively. [7] (b) Determine the steady-state errors in (a). Briefly comment on the differences in control performance by...
show steps please
10 A second-order open-loop system with transfer function G(s) = is to be $2+45+10 controlled with unity negative feedback. (a) Derive the error transfer functions E(s) of the closed-loop system subjected to a unit step input, when using a P controller and a PI controller, respectively, in terms P control gain kp, and PI control gains kp and ki, respectively. [7] (b) Determine the steady-state errors in (a). Briefly comment on the differences in control performance by...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller trans...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider the following transfer function of a linear control system Determine the state feedba...
 Consider the following transfer function of a linear control
system
Determine the state feedback gain matrix that places the closed
system at s=-32, -3.234 ± j3.3.
Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control system (a)...
Consider the following transfer function of a linear control
system
Determine the state feedback gain matrix that places the closed
system at s=-32, -3.234 ± j3.3.
Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control system (a)...
 It has the following transfer function:
-What happens to the plant with different values of ()
(relative damping factor), also analyze how it influences if the
values of
,
and
vary, for this implement scripts in Matlab.m and show the results
in graphs
corresponding.
- Implement models of transfer functions in:
a) open loop
b) closed loop with unit feedback
b) closed loop with unit feedback and a PID controller
**DO IT IN SIMULINK
LIKE THIS:
2 Gp(s) K* (+1)...
It has the following transfer function:
-What happens to the plant with different values of ()
(relative damping factor), also analyze how it influences if the
values of
,
and
vary, for this implement scripts in Matlab.m and show the results
in graphs
corresponding.
- Implement models of transfer functions in:
a) open loop
b) closed loop with unit feedback
b) closed loop with unit feedback and a PID controller
**DO IT IN SIMULINK
LIKE THIS:
2 Gp(s) K* (+1)...
 Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
 7. For a negative feedback control system with unit feedback gain, its open-loop 100 transfer function is G (s) Design a PID controller, so that the open s(10s) corresponding closed-loop poles are -2+jl and -5. (10 scores)
7. For a negative feedback control system with unit feedback gain, its open-loop 100 transfer function is G (s) Design a PID controller, so that the open s(10s) corresponding closed-loop poles are -2+jl and -5. (10 scores)
7. For a negative feedback control system with unit feedback gain, its open-loop 100 transfer function is G (s) Design a PID controller, so that the open s(10s) corresponding closed-loop poles are -2+jl and -5. (10 scores)
7. For a negative feedback control system with unit feedback gain, its open-loop 100 transfer function is G (s) Design a PID controller, so that the open s(10s) corresponding closed-loop poles are -2+jl and -5. (10 scores)
 4.35 Consider the feedback control system with the plant transfer function G(s) = (5+0.1)(5+0.5) (a) Design a proportional controller so the closed-loop system has damping of 5 = 0.707. Under what conditions on kp is the closed-loop system stable? (b) Design a PI controller so that the closed-loop system has no over- shoot. Under what conditions on (kp, kt) is the closed-loop system is stable? (©) Design a PID controller such that the settling time is less than 1.7 sec.
4.35 Consider the feedback control system with the plant transfer function G(s) = (5+0.1)(5+0.5) (a) Design a proportional controller so the closed-loop system has damping of 5 = 0.707. Under what conditions on kp is the closed-loop system stable? (b) Design a PI controller so that the closed-loop system has no over- shoot. Under what conditions on (kp, kt) is the closed-loop system is stable? (©) Design a PID controller such that the settling time is less than 1.7 sec.
 PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
 Consider the feedback sy PID COntroller Plant R(S) Y(s) the closed-loop transfer function T(s) = Y controller (Kp Find er p 1, Ks K ) and show that the system is marginally stable with two imaginary roots. (s)/R(s) with no sabl thosed-loop transfer function T(s) Y (S/R(s) with the (three- term) PID controller added to stabilize the system. suming that Kd 4 and K, -100, find the values (range) of Kp that will stabilize the system.
Consider the feedback sy PID COntroller Plant R(S) Y(s) the closed-loop transfer function T(s) = Y controller (Kp Find er p 1, Ks K ) and show that the system is marginally stable with two imaginary roots. (s)/R(s) with no sabl thosed-loop transfer function T(s) Y (S/R(s) with the (three- term) PID controller added to stabilize the system. suming that Kd 4 and K, -100, find the values (range) of Kp that will stabilize the system.
 show steps please
10 A second-order open-loop system with transfer function G(s) = is to be $2+45+10 controlled with unity negative feedback. (a) Derive the error transfer functions E(s) of the closed-loop system subjected to a unit step input, when using a P controller and a PI controller, respectively, in terms P control gain kp, and PI control gains kp and ki, respectively. [7] (b) Determine the steady-state errors in (a). Briefly comment on the differences in control performance by...
show steps please
10 A second-order open-loop system with transfer function G(s) = is to be $2+45+10 controlled with unity negative feedback. (a) Derive the error transfer functions E(s) of the closed-loop system subjected to a unit step input, when using a P controller and a PI controller, respectively, in terms P control gain kp, and PI control gains kp and ki, respectively. [7] (b) Determine the steady-state errors in (a). Briefly comment on the differences in control performance by...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
 Consider the following transfer function of a linear control
system
Determine the state feedback gain matrix that places the closed
system at s=-32, -3.234 ± j3.3.
Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control system (a)...
Consider the following transfer function of a linear control
system
Determine the state feedback gain matrix that places the closed
system at s=-32, -3.234 ± j3.3.
Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control system (a)...
Most questions answered within 3 hours.
-
For this exercise, round all regression parameters to three
decimal places.
One of the two tables...
asked 16 minutes ago -
What is the 5% level of significance for mean = 3.60, standard
deviation = 0.94, and...
asked 20 minutes ago -
Prior to beginning work on this discussion, please read the
article by Hayley Peterson, 15 Companies...
asked 49 minutes ago -
Which pair of aqueous solutions, when mixed, will form a
precipitate?
A) NaNO3 and AgC2H3O2
B)...
asked 1 hour ago -
1-Write an algorithm to get two numbers from the user (as
inputs) and calculate the sum...
asked 4 hours ago -
Define white-collar crime. What is the difference between
offender and offense-based definitions of white-collar crime? What...
asked 5 hours ago -
Consider a reaction which is 1st order with respect to A and 1st
order with respect...
asked 5 hours ago -
c++
The length of the hypotenuse of a right-angled triangle is the
square root of the...
asked 5 hours ago -
When a metal rod is heated, not only its resistance but also its
length and cross‐sectional...
asked 5 hours ago -
write a c++ program that computes the L^1 - Norm of a given
vector (L^1 norm...
asked 5 hours ago -
A manufacturer of banana chips would like to know whether its
bag filling machine works correctly...
asked 5 hours ago -
Complete the chapter case, "Turnover Analysis".
Chapter Case
Turnover Analysis
You recently completed your company’s new...
asked 5 hours ago