
Homework Answers

Add Answer to:
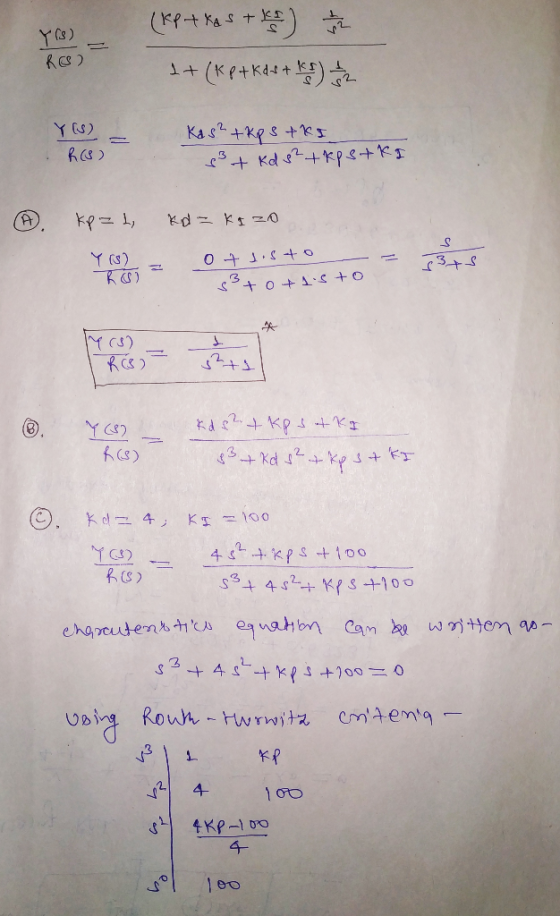
Consider the feedback sy PID COntroller Plant R(S) Y(s) the closed-loop transfer function T(s) = Y...
Implement a PID controller to control the transfer function shown below. The PID controller and plant...
 Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5...
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s)...
 PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
4.35 Consider the feedback control system with the plant transfer function G(s) = (5+0.1)(5+0.5) (a) Design...
 4.35 Consider the feedback control system with the plant transfer function G(s) = (5+0.1)(5+0.5) (a) Design a proportional controller so the closed-loop system has damping of 5 = 0.707. Under what conditions on kp is the closed-loop system stable? (b) Design a PI controller so that the closed-loop system has no over- shoot. Under what conditions on (kp, kt) is the closed-loop system is stable? (©) Design a PID controller such that the settling time is less than 1.7 sec.
4.35 Consider the feedback control system with the plant transfer function G(s) = (5+0.1)(5+0.5) (a) Design a proportional controller so the closed-loop system has damping of 5 = 0.707. Under what conditions on kp is the closed-loop system stable? (b) Design a PI controller so that the closed-loop system has no over- shoot. Under what conditions on (kp, kt) is the closed-loop system is stable? (©) Design a PID controller such that the settling time is less than 1.7 sec.
question b or the control system in Figure 1: C(s) Find the closed-loop transfer function T(s)-- R(s) a) b) Find a...
 question b
or the control system in Figure 1: C(s) Find the closed-loop transfer function T(s)-- R(s) a) b) Find a value of Kp that will yield less than 15% overshoot for the closed-loop system. (Note: ignore the zero dynamics to calculate Kp initially). c IIsing vour K from nart h) write a MATI AR scrint that calculates the closedloon Motor Plant R(s)+ C(s) Controller 10 Kp (s+9) s2 +6s15 12 Figure 1: Unity feedback with PD control
or the...
question b
or the control system in Figure 1: C(s) Find the closed-loop transfer function T(s)-- R(s) a) b) Find a value of Kp that will yield less than 15% overshoot for the closed-loop system. (Note: ignore the zero dynamics to calculate Kp initially). c IIsing vour K from nart h) write a MATI AR scrint that calculates the closedloon Motor Plant R(s)+ C(s) Controller 10 Kp (s+9) s2 +6s15 12 Figure 1: Unity feedback with PD control
or the...
Consider the unity feedback system is given below R(S) C(s) G() with transfer function: G(s) =...
 Consider the unity feedback system is given below R(S) C(s) G() with transfer function: G(s) = K s(s + 1)(s + 2)(8 + 6) a) Find the value of the gain K, that will make the system stable. b) Find the value of the gain K, that will make the system marginally stable. c) Find the actual location of the closed-loop poles when the system is marginally stable.
Consider the unity feedback system is given below R(S) C(s) G() with transfer function: G(s) = K s(s + 1)(s + 2)(8 + 6) a) Find the value of the gain K, that will make the system stable. b) Find the value of the gain K, that will make the system marginally stable. c) Find the actual location of the closed-loop poles when the system is marginally stable.
Give me the explanation plz 2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) =...
 Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
1. (10 points) o Consider the unity feedback system with open loop transfer function Ко L(s)...
 1. (10 points) o Consider the unity feedback system with open loop transfer function Ко L(s) = s(s+ 7) (s+ 3) Let Tf = 0.15 and Tm = 0.3. What value(s) of Ko produce a marginally stable system? Should K, be pushed larger or samller than those value(s) to stabilize the closed-loop system?
1. (10 points) o Consider the unity feedback system with open loop transfer function Ко L(s) = s(s+ 7) (s+ 3) Let Tf = 0.15 and Tm = 0.3. What value(s) of Ko produce a marginally stable system? Should K, be pushed larger or samller than those value(s) to stabilize the closed-loop system?
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller trans...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e()...
 Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e() r(t) y(t) closed-loop transfer-function: Hyr(sD t the closed-loop transfer-function be Hyr(s) Y (s) R(s) Let the transfer-function of the plant be P(s) 10 s (s 1) (s 5) The open-loop transfer-function is G(s) P(s) C(s) DESIGN OBJECTIVES: Find a controller C(s) such that the following are satisfied i) The closed-loop system is stable. ii) The steady-state error ess due to a unit-ramp input r(t)...
Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e() r(t) y(t) closed-loop transfer-function: Hyr(sD t the closed-loop transfer-function be Hyr(s) Y (s) R(s) Let the transfer-function of the plant be P(s) 10 s (s 1) (s 5) The open-loop transfer-function is G(s) P(s) C(s) DESIGN OBJECTIVES: Find a controller C(s) such that the following are satisfied i) The closed-loop system is stable. ii) The steady-state error ess due to a unit-ramp input r(t)...
 Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
Implement a PID controller to control the transfer function
shown below. The PID controller and plant transfer function should
be in a closed feedback loop. Assume the feedback loop has a Gain
of 5 associated with it i.e. . The Transfer function of a PID
controller is also given below. Start by:
6. Implement a PID controller to control the transfer function shown below. The PID feedback loop has a Gain of 5 associated with it i.e. (HS) = 5)....
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
 PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
PD & PID controller design Consider a unity feedback system with open loop transfer function, G(s) = 20/s(s+2)(8+4). Design a PD controller so that the closed loop has a damping ratio of 0.8 and natural frequency of oscillation as 2 rad/sec. b) 100 Consider a unity feedback system with open loop transfer function, aus. Design a PID controller, so that the phase margin of (S-1) (s + 2) (s+10) the system is 45° at a frequency of 4 rad/scc and...
 4.35 Consider the feedback control system with the plant transfer function G(s) = (5+0.1)(5+0.5) (a) Design a proportional controller so the closed-loop system has damping of 5 = 0.707. Under what conditions on kp is the closed-loop system stable? (b) Design a PI controller so that the closed-loop system has no over- shoot. Under what conditions on (kp, kt) is the closed-loop system is stable? (©) Design a PID controller such that the settling time is less than 1.7 sec.
4.35 Consider the feedback control system with the plant transfer function G(s) = (5+0.1)(5+0.5) (a) Design a proportional controller so the closed-loop system has damping of 5 = 0.707. Under what conditions on kp is the closed-loop system stable? (b) Design a PI controller so that the closed-loop system has no over- shoot. Under what conditions on (kp, kt) is the closed-loop system is stable? (©) Design a PID controller such that the settling time is less than 1.7 sec.
 question b
or the control system in Figure 1: C(s) Find the closed-loop transfer function T(s)-- R(s) a) b) Find a value of Kp that will yield less than 15% overshoot for the closed-loop system. (Note: ignore the zero dynamics to calculate Kp initially). c IIsing vour K from nart h) write a MATI AR scrint that calculates the closedloon Motor Plant R(s)+ C(s) Controller 10 Kp (s+9) s2 +6s15 12 Figure 1: Unity feedback with PD control
or the...
question b
or the control system in Figure 1: C(s) Find the closed-loop transfer function T(s)-- R(s) a) b) Find a value of Kp that will yield less than 15% overshoot for the closed-loop system. (Note: ignore the zero dynamics to calculate Kp initially). c IIsing vour K from nart h) write a MATI AR scrint that calculates the closedloon Motor Plant R(s)+ C(s) Controller 10 Kp (s+9) s2 +6s15 12 Figure 1: Unity feedback with PD control
or the...
 Consider the unity feedback system is given below R(S) C(s) G() with transfer function: G(s) = K s(s + 1)(s + 2)(8 + 6) a) Find the value of the gain K, that will make the system stable. b) Find the value of the gain K, that will make the system marginally stable. c) Find the actual location of the closed-loop poles when the system is marginally stable.
Consider the unity feedback system is given below R(S) C(s) G() with transfer function: G(s) = K s(s + 1)(s + 2)(8 + 6) a) Find the value of the gain K, that will make the system stable. b) Find the value of the gain K, that will make the system marginally stable. c) Find the actual location of the closed-loop poles when the system is marginally stable.
 Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
 1. (10 points) o Consider the unity feedback system with open loop transfer function Ко L(s) = s(s+ 7) (s+ 3) Let Tf = 0.15 and Tm = 0.3. What value(s) of Ko produce a marginally stable system? Should K, be pushed larger or samller than those value(s) to stabilize the closed-loop system?
1. (10 points) o Consider the unity feedback system with open loop transfer function Ко L(s) = s(s+ 7) (s+ 3) Let Tf = 0.15 and Tm = 0.3. What value(s) of Ko produce a marginally stable system? Should K, be pushed larger or samller than those value(s) to stabilize the closed-loop system?
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
 Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e() r(t) y(t) closed-loop transfer-function: Hyr(sD t the closed-loop transfer-function be Hyr(s) Y (s) R(s) Let the transfer-function of the plant be P(s) 10 s (s 1) (s 5) The open-loop transfer-function is G(s) P(s) C(s) DESIGN OBJECTIVES: Find a controller C(s) such that the following are satisfied i) The closed-loop system is stable. ii) The steady-state error ess due to a unit-ramp input r(t)...
Consider the unity-feedback system shown below: R(s) E(s) input: r(t), output: y(t) C(s) P(s) error: e() r(t) y(t) closed-loop transfer-function: Hyr(sD t the closed-loop transfer-function be Hyr(s) Y (s) R(s) Let the transfer-function of the plant be P(s) 10 s (s 1) (s 5) The open-loop transfer-function is G(s) P(s) C(s) DESIGN OBJECTIVES: Find a controller C(s) such that the following are satisfied i) The closed-loop system is stable. ii) The steady-state error ess due to a unit-ramp input r(t)...
Most questions answered within 3 hours.
-
The outstanding bonds of Alpha Extracts have a yield to maturity
of 7.4 percent and a...
asked 18 minutes ago -
A 8.15- g bullet from a 9-mm pistol has a velocity of 366.0 m/s.
It strikes...
asked 21 minutes ago -
The Problem: The Case of the Harmonizing Vacations
Your CEO is exploring partnering with a European...
asked 1 hour ago -
A chemical equation is balanced by adding coefficients in front
of some formulas so that the...
asked 1 hour ago -
From the literature (reference your sources): What are the
lattice parameters of calcite and aragonite? Why...
asked 2 hours ago -
Your system is rejecting the question am asking which is
preceded by a case study. It...
asked 2 hours ago -
3. On January 2, 2000, Larry creates a trust with himself as
trustee. Larry as trustee...
asked 2 hours ago -
A member of the volleyball team spikes the ball. During this
process, she changes the velocity...
asked 2 hours ago -
Are adult gamers less likely to use a gaming console (Xbox,
PlayStation, Wii, etc...) than teen...
asked 3 hours ago -
The University of
Texas recently reported that 43% of college students aged 18-24
would spend their...
asked 3 hours ago -
The length of stay at a specific emergency department in
Phoenix, Arizona, in 2009 had a...
asked 2 hours ago -
. Please give the mechanism for this type of problem. Step by
Step
The toxin that...
asked 2 hours ago