![k c M mm] F M = 70kg C = 1 Ns/m k = 26N/m FO = 5N/S a = 9s (duration of the couple in seconds) b = 45N (magnitude of the step](http://img.homeworklib.com/questions/a6dc64a0-3c08-11eb-af99-6d2bc4c6600a.png?x-oss-process=image/resize,w_560)

Homework Answers
Kindly go through the solution and let me know in case
of any doubt or further clarification in the comment box.
Thanks for the question :)
And your upvote will be really appreciable ;)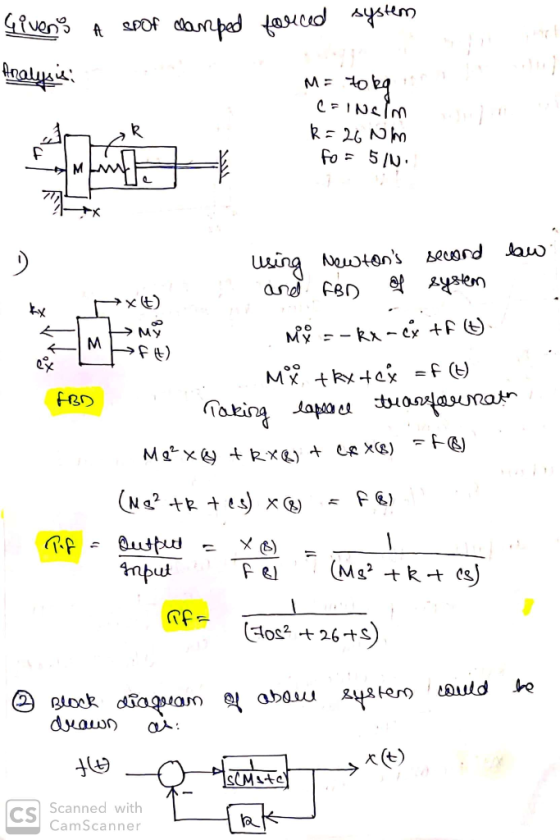
Introduction Many doors in public places are fitted with simple and inexpensive mechanisms that are designed...
 Introduction Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. Figure 1 Figure 1 depicts one such mechanism while Figure 2 provides a schematic description. The spring is mounted in order to push the door back to close once it is opened. The role of the hydraulic dashpot is to provide a viscous force that will prevent the door from slamming against...
Introduction Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. Figure 1 Figure 1 depicts one such mechanism while Figure 2 provides a schematic description. The spring is mounted in order to push the door back to close once it is opened. The role of the hydraulic dashpot is to provide a viscous force that will prevent the door from slamming against...
Introduction Many doors in public places are fitted with simple and inexpensive mechanisms that are designed...
 Introduction Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. Figure 1 Figure 1 depicts one such mechanism while Figure 2 provides a schematic description. The spring is mounted in order to push the door back to close once it is opened. The role of the hydraulic dashpot is to provide a viscous force that will prevent the door from slamming against...
Introduction Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. Figure 1 Figure 1 depicts one such mechanism while Figure 2 provides a schematic description. The spring is mounted in order to push the door back to close once it is opened. The role of the hydraulic dashpot is to provide a viscous force that will prevent the door from slamming against...
Introduction Many doors in public places are fitted with simple and inexpensive mechanisms that are designed...
 Introduction Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. Figure 1 Figure 1 depicts one such mechanism while Figure 2 provides a schematic description. The spring is mounted in order to push the door back to close once it is opened. The role of the hydraulic dashpot is to provide a viscous force that will prevent the door from slamming against...
Introduction Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. Figure 1 Figure 1 depicts one such mechanism while Figure 2 provides a schematic description. The spring is mounted in order to push the door back to close once it is opened. The role of the hydraulic dashpot is to provide a viscous force that will prevent the door from slamming against...
Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to...
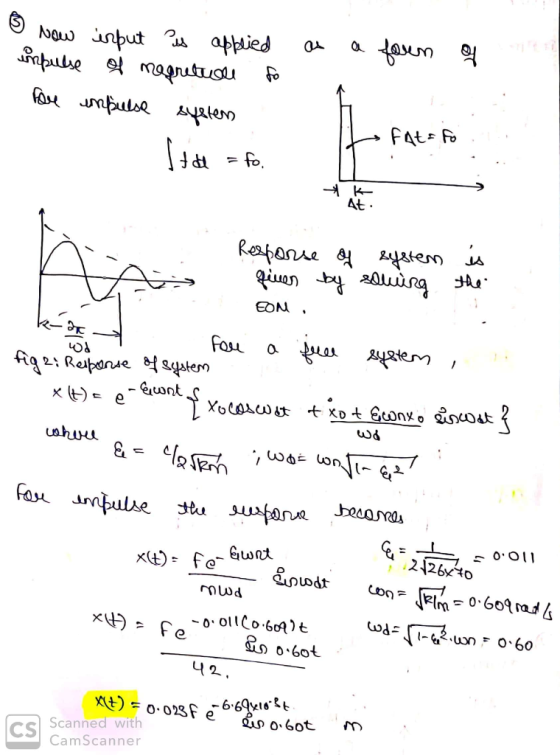
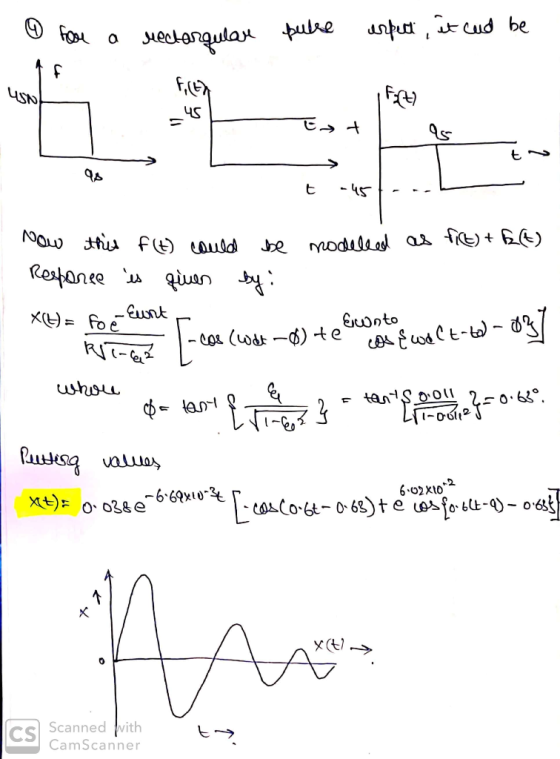
 Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. mm с M F M = 70kg C = 1Ns/m k = 26N/m FO = 5N/S 9 = 95 (duration of the couple in seconds) b = 45N (magnitude of the step in N) z = 2.4 (zero of the controller) p = 4.3 (pole of the controller) Assume you are a newly...
Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. mm с M F M = 70kg C = 1Ns/m k = 26N/m FO = 5N/S 9 = 95 (duration of the couple in seconds) b = 45N (magnitude of the step in N) z = 2.4 (zero of the controller) p = 4.3 (pole of the controller) Assume you are a newly...
Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to...
 Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. mm с M F M = 70kg C = 1Ns/m k = 26N/m FO = 5N/S 9 = 95 (duration of the couple in seconds) b = 45N (magnitude of the step in N) z = 2.4 (zero of the controller) p = 4.3 (pole of the controller) Assume you are a newly...
Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. mm с M F M = 70kg C = 1Ns/m k = 26N/m FO = 5N/S 9 = 95 (duration of the couple in seconds) b = 45N (magnitude of the step in N) z = 2.4 (zero of the controller) p = 4.3 (pole of the controller) Assume you are a newly...
Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to...
 Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. mm с M F M = 70kg C = 1Ns/m k = 26N/m FO = 5N/S 9 = 95 (duration of the couple in seconds) b = 45N (magnitude of the step in N) z = 2.4 (zero of the controller) p = 4.3 (pole of the controller) Assume you are a newly...
Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. mm с M F M = 70kg C = 1Ns/m k = 26N/m FO = 5N/S 9 = 95 (duration of the couple in seconds) b = 45N (magnitude of the step in N) z = 2.4 (zero of the controller) p = 4.3 (pole of the controller) Assume you are a newly...
Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to...
 Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. mm с M F M = 70kg C = 1Ns/m k = 26N/m FO = 5N/S 9 = 95 (duration of the couple in seconds) b = 45N (magnitude of the step in N) z = 2.4 (zero of the controller) p = 4.3 (pole of the controller) Assume you are a newly...
Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. mm с M F M = 70kg C = 1Ns/m k = 26N/m FO = 5N/S 9 = 95 (duration of the couple in seconds) b = 45N (magnitude of the step in N) z = 2.4 (zero of the controller) p = 4.3 (pole of the controller) Assume you are a newly...
3. Consider the following mass-spring-damper system. Let m= 1 kg, b = 10 Ns/m, and k...
 3. Consider the following mass-spring-damper system. Let m= 1 kg, b = 10 Ns/m, and k = 20 N/m. b m F k a) Derive the open-loop transfer function X(S) F(s) Plot the step response using matlab. b) Derive the closed-loop transfer function with P-controller with Kp = 300. Plot the step response using matlab. c) Derive the closed-loop transfer function with PD-controller with Ky and Ka = 10. Plot the step response using matlab. d) Derive the closed-loop transfer...
3. Consider the following mass-spring-damper system. Let m= 1 kg, b = 10 Ns/m, and k = 20 N/m. b m F k a) Derive the open-loop transfer function X(S) F(s) Plot the step response using matlab. b) Derive the closed-loop transfer function with P-controller with Kp = 300. Plot the step response using matlab. c) Derive the closed-loop transfer function with PD-controller with Ky and Ka = 10. Plot the step response using matlab. d) Derive the closed-loop transfer...
Plot the following data, then find the slope and intercept. F = 1/K(x + a) F...
 Plot the following data, then find the slope and intercept. F = 1/K(x + a) F = force x = position m (slope) = (intercept) = From the value of slope and intercept found in problem #5, find the following constants.(Do not find them by solving the equation and plugging in values.) K = force coefficient = a = initial position = For the data of problem #1, find a change of variable substitution that will transform the data to...
Plot the following data, then find the slope and intercept. F = 1/K(x + a) F = force x = position m (slope) = (intercept) = From the value of slope and intercept found in problem #5, find the following constants.(Do not find them by solving the equation and plugging in values.) K = force coefficient = a = initial position = For the data of problem #1, find a change of variable substitution that will transform the data to...
Consider the plant sDs2) 1) What is the plant's type? 2) Let C(s) - K (a...
 Consider the plant sDs2) 1) What is the plant's type? 2) Let C(s) - K (a proportional controller). Find the closed-loop transfer function from reference to output using unity feedback. ) Choose different gains for K within the range 1 to 100. Plot the unit step response for the different gains. What happens with the transient response of the closed-loop as K increases? 4) For K 20 find the maximum value attained by the output y(t) and the settling time...
Consider the plant sDs2) 1) What is the plant's type? 2) Let C(s) - K (a proportional controller). Find the closed-loop transfer function from reference to output using unity feedback. ) Choose different gains for K within the range 1 to 100. Plot the unit step response for the different gains. What happens with the transient response of the closed-loop as K increases? 4) For K 20 find the maximum value attained by the output y(t) and the settling time...
 Introduction Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. Figure 1 Figure 1 depicts one such mechanism while Figure 2 provides a schematic description. The spring is mounted in order to push the door back to close once it is opened. The role of the hydraulic dashpot is to provide a viscous force that will prevent the door from slamming against...
Introduction Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. Figure 1 Figure 1 depicts one such mechanism while Figure 2 provides a schematic description. The spring is mounted in order to push the door back to close once it is opened. The role of the hydraulic dashpot is to provide a viscous force that will prevent the door from slamming against...
 Introduction Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. Figure 1 Figure 1 depicts one such mechanism while Figure 2 provides a schematic description. The spring is mounted in order to push the door back to close once it is opened. The role of the hydraulic dashpot is to provide a viscous force that will prevent the door from slamming against...
Introduction Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. Figure 1 Figure 1 depicts one such mechanism while Figure 2 provides a schematic description. The spring is mounted in order to push the door back to close once it is opened. The role of the hydraulic dashpot is to provide a viscous force that will prevent the door from slamming against...
 Introduction Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. Figure 1 Figure 1 depicts one such mechanism while Figure 2 provides a schematic description. The spring is mounted in order to push the door back to close once it is opened. The role of the hydraulic dashpot is to provide a viscous force that will prevent the door from slamming against...
Introduction Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. Figure 1 Figure 1 depicts one such mechanism while Figure 2 provides a schematic description. The spring is mounted in order to push the door back to close once it is opened. The role of the hydraulic dashpot is to provide a viscous force that will prevent the door from slamming against...
 Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. mm с M F M = 70kg C = 1Ns/m k = 26N/m FO = 5N/S 9 = 95 (duration of the couple in seconds) b = 45N (magnitude of the step in N) z = 2.4 (zero of the controller) p = 4.3 (pole of the controller) Assume you are a newly...
Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. mm с M F M = 70kg C = 1Ns/m k = 26N/m FO = 5N/S 9 = 95 (duration of the couple in seconds) b = 45N (magnitude of the step in N) z = 2.4 (zero of the controller) p = 4.3 (pole of the controller) Assume you are a newly...
 Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. mm с M F M = 70kg C = 1Ns/m k = 26N/m FO = 5N/S 9 = 95 (duration of the couple in seconds) b = 45N (magnitude of the step in N) z = 2.4 (zero of the controller) p = 4.3 (pole of the controller) Assume you are a newly...
Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. mm с M F M = 70kg C = 1Ns/m k = 26N/m FO = 5N/S 9 = 95 (duration of the couple in seconds) b = 45N (magnitude of the step in N) z = 2.4 (zero of the controller) p = 4.3 (pole of the controller) Assume you are a newly...
 Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. mm с M F M = 70kg C = 1Ns/m k = 26N/m FO = 5N/S 9 = 95 (duration of the couple in seconds) b = 45N (magnitude of the step in N) z = 2.4 (zero of the controller) p = 4.3 (pole of the controller) Assume you are a newly...
Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. mm с M F M = 70kg C = 1Ns/m k = 26N/m FO = 5N/S 9 = 95 (duration of the couple in seconds) b = 45N (magnitude of the step in N) z = 2.4 (zero of the controller) p = 4.3 (pole of the controller) Assume you are a newly...
 Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. mm с M F M = 70kg C = 1Ns/m k = 26N/m FO = 5N/S 9 = 95 (duration of the couple in seconds) b = 45N (magnitude of the step in N) z = 2.4 (zero of the controller) p = 4.3 (pole of the controller) Assume you are a newly...
Many doors in public places are fitted with simple and inexpensive mechanisms that are designed to close the doors while reducing the slamming force to a minimum. mm с M F M = 70kg C = 1Ns/m k = 26N/m FO = 5N/S 9 = 95 (duration of the couple in seconds) b = 45N (magnitude of the step in N) z = 2.4 (zero of the controller) p = 4.3 (pole of the controller) Assume you are a newly...
 3. Consider the following mass-spring-damper system. Let m= 1 kg, b = 10 Ns/m, and k = 20 N/m. b m F k a) Derive the open-loop transfer function X(S) F(s) Plot the step response using matlab. b) Derive the closed-loop transfer function with P-controller with Kp = 300. Plot the step response using matlab. c) Derive the closed-loop transfer function with PD-controller with Ky and Ka = 10. Plot the step response using matlab. d) Derive the closed-loop transfer...
3. Consider the following mass-spring-damper system. Let m= 1 kg, b = 10 Ns/m, and k = 20 N/m. b m F k a) Derive the open-loop transfer function X(S) F(s) Plot the step response using matlab. b) Derive the closed-loop transfer function with P-controller with Kp = 300. Plot the step response using matlab. c) Derive the closed-loop transfer function with PD-controller with Ky and Ka = 10. Plot the step response using matlab. d) Derive the closed-loop transfer...
 Plot the following data, then find the slope and intercept. F = 1/K(x + a) F = force x = position m (slope) = (intercept) = From the value of slope and intercept found in problem #5, find the following constants.(Do not find them by solving the equation and plugging in values.) K = force coefficient = a = initial position = For the data of problem #1, find a change of variable substitution that will transform the data to...
Plot the following data, then find the slope and intercept. F = 1/K(x + a) F = force x = position m (slope) = (intercept) = From the value of slope and intercept found in problem #5, find the following constants.(Do not find them by solving the equation and plugging in values.) K = force coefficient = a = initial position = For the data of problem #1, find a change of variable substitution that will transform the data to...
 Consider the plant sDs2) 1) What is the plant's type? 2) Let C(s) - K (a proportional controller). Find the closed-loop transfer function from reference to output using unity feedback. ) Choose different gains for K within the range 1 to 100. Plot the unit step response for the different gains. What happens with the transient response of the closed-loop as K increases? 4) For K 20 find the maximum value attained by the output y(t) and the settling time...
Consider the plant sDs2) 1) What is the plant's type? 2) Let C(s) - K (a proportional controller). Find the closed-loop transfer function from reference to output using unity feedback. ) Choose different gains for K within the range 1 to 100. Plot the unit step response for the different gains. What happens with the transient response of the closed-loop as K increases? 4) For K 20 find the maximum value attained by the output y(t) and the settling time...
Most questions answered within 3 hours.
-
HELP WITH SAS
Run the following DATA step to create a SAS data set called
ABC_CORP....
asked 6 minutes ago -
A researcher wishes to study the cumulative effects of several
combinations of HIV drugs. There are...
asked 25 minutes ago -
How
to make a simple game of whack a mole in pygame
asked 9 minutes ago -
Write a c/c++ program to read a list of students from a file and
create a...
asked 18 minutes ago -
Identify two different methods for collecting data in
qualitative research. What are the benefits and challenges...
asked 19 minutes ago -
I am suppose to have my array before the main class but I am
getting the...
asked 20 minutes ago -
Your task is to design the page table for the 32bit Pentium
microprocessor. Answer the following...
asked 27 minutes ago -
The Paradise Shoes Company has estimated its weekly TVC function
from data collected over the past...
asked 25 minutes ago -
Although Epicurus advocates pursuing pleasure for the
good life, discuss a few reasons why he does...
asked 43 minutes ago -
Problem 1: Present entries to record the selected transactions
described below:
(a)
Issued $2,790,000 of 5-year,...
asked 49 minutes ago -
Using technology to support HR activities increases:
a.
the efficiency of the administrative HR functions.
b....
asked 50 minutes ago -
1. List the features used to classify leaf
types.
2. List some characteristics that are shared...
asked 55 minutes ago