
![8.1 Given X(0) = [ 21 1 c)+ [ 2 ]uco), y()= [1 1]XC)](http://img.homeworklib.com/questions/116ff150-9caf-11eb-8c8b-3ba2cebc220e.png?x-oss-process=image/resize,w_560)
Homework Answers
ANSWER
Given that
![@ [ty ta] [71- [+0] [ti tg) - 03 [1 ] (34-t2 1+ty] + (101 10t2] = [1 ] 24-t2 +10+1=” 1971 – 2 = 1 -- ti+tz+102= ti+litz=1 sol](http://img.homeworklib.com/questions/134bf9e0-9caf-11eb-bd74-593cba6ed0bb.png?x-oss-process=image/resize,w_560)
Add Answer to:
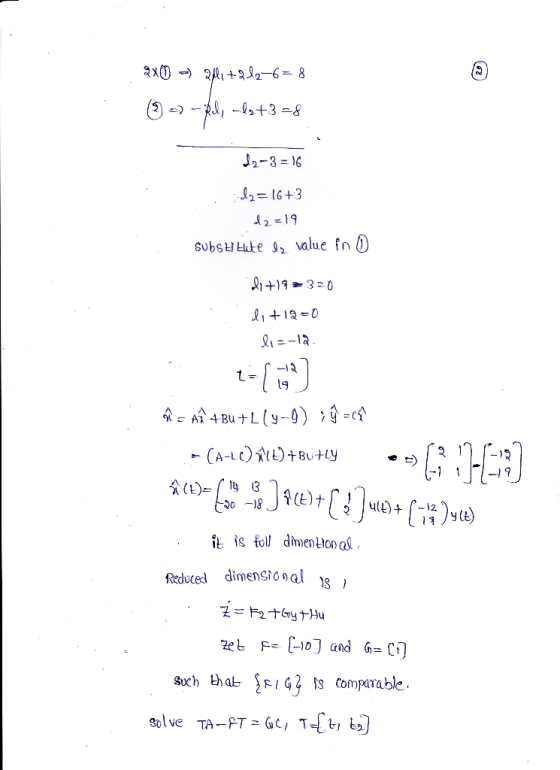
8.11 Design a full-dimensional and a reduced-dimensional state estimator for the state-space equation in Problem 8.1....
(Full Order Observer). Given the following state space equations =1-5-251-1 -1 0 1 0 CID |...
 (Full Order Observer). Given the following state space equations =1-5-251-1 -1 0 1 0 CID | a) Determine if the system is stable. b) Is the system Observable? Detectable? c) Design a full order observer that places the estimator-error poles at {-5±5 d) Check the entire set of eigenvalues of the estimator.
(Full Order Observer). Given the following state space equations =1-5-251-1 -1 0 1 0 CID | a) Determine if the system is stable. b) Is the system Observable? Detectable? c) Design a full order observer that places the estimator-error poles at {-5±5 d) Check the entire set of eigenvalues of the estimator.
Please show all work and write neatly so that I can understand. All information is given Problem 4 The state-space equations for the simple pendulum is 0 1 25 02 T2 C2 a) Design a state feedback con...
 Please show all work and write neatly so that I can understand.
All
information is given
Problem 4 The state-space equations for the simple pendulum is 0 1 25 02 T2 C2 a) Design a state feedback controller such that the roots of the closed-loop characteristic equation arc at s-41 4j b) Design an estimator that reconstructs the state of the pendulum. Pick the estimator roots to be at s--10 ± 10, (Make sure to provide the dynamics equation of...
Please show all work and write neatly so that I can understand.
All
information is given
Problem 4 The state-space equations for the simple pendulum is 0 1 25 02 T2 C2 a) Design a state feedback controller such that the roots of the closed-loop characteristic equation arc at s-41 4j b) Design an estimator that reconstructs the state of the pendulum. Pick the estimator roots to be at s--10 ± 10, (Make sure to provide the dynamics equation of...
Please only solve part C Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with th...
 Please only solve part C
Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with the difference equation in Problem 1 on Homework 2. This parenthetical comment is not a required part for Homework 8.) 2. 0.048371 u(n) 1.9048x(n) lo.04679 [1,0]x(n) y(n) Compute the open-loop eigenvalues of the system. That is, find the eigenvalues of Ф. Check controllability of the system. Or, answer the...
Please only solve part C
Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with the difference equation in Problem 1 on Homework 2. This parenthetical comment is not a required part for Homework 8.) 2. 0.048371 u(n) 1.9048x(n) lo.04679 [1,0]x(n) y(n) Compute the open-loop eigenvalues of the system. That is, find the eigenvalues of Ф. Check controllability of the system. Or, answer the...
Test 1 2: A state space representation of a system is given by: -2 011 y=[0...
 Test 1 2: A state space representation of a system is given by: -2 011 y=[0 1]x 1. Design a state variable feedback control to place the closed-loop poles s =-3 ±j2. Assume that the complete state vector is available for feedback.。 Find the resulted close loop transfer function.
Test 1 2: A state space representation of a system is given by: -2 011 y=[0 1]x 1. Design a state variable feedback control to place the closed-loop poles s =-3 ±j2. Assume that the complete state vector is available for feedback.。 Find the resulted close loop transfer function.
Question 1 [Total 20 marks] (a) [5 marks] In a steady-state two-dimensional heat flow problem, th...
 Question 1 [Total 20 marks] (a) [5 marks] In a steady-state two-dimensional heat flow problem, the temperature, u, at any point in the domain (t, ) satisfies the differential equation u y(2-y) u= U0F With the given temperature boundary condition as follows: u(x, 0) = 0, u(x, 2) = x(4-x), 0 < x < 4 Calculate the temperature at the interior points a, b, and c using a mesh size h-1.
Question 1 [Total 20 marks] (a) [5 marks] In...
Question 1 [Total 20 marks] (a) [5 marks] In a steady-state two-dimensional heat flow problem, the temperature, u, at any point in the domain (t, ) satisfies the differential equation u y(2-y) u= U0F With the given temperature boundary condition as follows: u(x, 0) = 0, u(x, 2) = x(4-x), 0 < x < 4 Calculate the temperature at the interior points a, b, and c using a mesh size h-1.
Question 1 [Total 20 marks] (a) [5 marks] In...
6. In Problem 1, show that θ2 is a consistent estimator for θ. Deduce that Y(n) is a consistent e...
 Please answer as neatly as possible.
Much thanks in advance!
Question 1:
6. In Problem 1, show that θ2 is a consistent estimator for θ. Deduce that Y(n) is a consistent estimator for θ and also asyınpt○tically unbiased estimator for θ. 1. Let Yi, ½, . . . ,y, denote a random sample from an uniform distribution on the interval (0,0). We have seen that (1) and 62 Ym are unbiased estimators for 0. Find the efficiency of 6 relative...
Please answer as neatly as possible.
Much thanks in advance!
Question 1:
6. In Problem 1, show that θ2 is a consistent estimator for θ. Deduce that Y(n) is a consistent estimator for θ and also asyınpt○tically unbiased estimator for θ. 1. Let Yi, ½, . . . ,y, denote a random sample from an uniform distribution on the interval (0,0). We have seen that (1) and 62 Ym are unbiased estimators for 0. Find the efficiency of 6 relative...
a-represent system in state space form? b-find output response y(t? c-design a state feedback gain controller? 3- A dyn...
 a-represent system in state space form?
b-find output response y(t?
c-design a state feedback gain controller?
3- A dynamic system is described by the following set of coupled linear ordinary differential equations: x1 + 2x1-4x2-5u x1-x2 + 4x1 + x2 = 5u EDQMS 2/3 Page 1 of 2 a. Represent the system in state-space form. b. For u(t) =1 and initial condition state vector x(0) = LII find the outp (10 marks) response y(t). c. Design a state feedback gain...
a-represent system in state space form?
b-find output response y(t?
c-design a state feedback gain controller?
3- A dynamic system is described by the following set of coupled linear ordinary differential equations: x1 + 2x1-4x2-5u x1-x2 + 4x1 + x2 = 5u EDQMS 2/3 Page 1 of 2 a. Represent the system in state-space form. b. For u(t) =1 and initial condition state vector x(0) = LII find the outp (10 marks) response y(t). c. Design a state feedback gain...
Can someone please explain how to solve the problem below? 6. State Space Systems: a. (5...
 Can someone please explain how to solve the problem below?
6. State Space Systems: a. (5 pts) Determine the state space system in controllable canonical form that implements the transfer function Y(s)_ 252 +5 U(s) s+4s+7s +12 b. (10 pts) For the state space system given below, design a controller u =-Kx+v such that the eigenvalues of the closed loop system are -10, – 20. To 17 , y = Cx C = [25] x = Ax+Bu with A= ln...
Can someone please explain how to solve the problem below?
6. State Space Systems: a. (5 pts) Determine the state space system in controllable canonical form that implements the transfer function Y(s)_ 252 +5 U(s) s+4s+7s +12 b. (10 pts) For the state space system given below, design a controller u =-Kx+v such that the eigenvalues of the closed loop system are -10, – 20. To 17 , y = Cx C = [25] x = Ax+Bu with A= ln...
In a steady-state two-dimensional heat flow problem, the temperature, u, at any point in the doma...
 In a steady-state two-dimensional heat flow problem, the temperature, u, at any point in the domain (x, y) satisfies the following differential equation. With the given temperature boundary condition, find the internal temperature at points a, b, and c using a numerical method. 0 4 4
In a steady-state two-dimensional heat flow problem, the temperature, u, at any point in the domain (x, y) satisfies the following differential equation. With the given temperature boundary condition, find the internal temperature at...
In a steady-state two-dimensional heat flow problem, the temperature, u, at any point in the domain (x, y) satisfies the following differential equation. With the given temperature boundary condition, find the internal temperature at points a, b, and c using a numerical method. 0 4 4
In a steady-state two-dimensional heat flow problem, the temperature, u, at any point in the domain (x, y) satisfies the following differential equation. With the given temperature boundary condition, find the internal temperature at...
Q3. The state-space representation of a dynamical system is given as follows: (2) (y = 2...
 Q3. The state-space representation of a dynamical system is given as follows: (2) (y = 2 x 1. By finding the eigenvalues, eigenvectors of the A matrix, compute el via the diagonal transformation. 2. Assume that the control input is u(t) = 0, compute x(1) and y(t). 3. Assume that the input is u(t) = 1 + 2e-21, compute x(t) and y(t). 4. Given your answers to the previous question, compute x(t) when 1 00
Q3. The state-space representation of a dynamical system is given as follows: (2) (y = 2 x 1. By finding the eigenvalues, eigenvectors of the A matrix, compute el via the diagonal transformation. 2. Assume that the control input is u(t) = 0, compute x(1) and y(t). 3. Assume that the input is u(t) = 1 + 2e-21, compute x(t) and y(t). 4. Given your answers to the previous question, compute x(t) when 1 00
 (Full Order Observer). Given the following state space equations =1-5-251-1 -1 0 1 0 CID | a) Determine if the system is stable. b) Is the system Observable? Detectable? c) Design a full order observer that places the estimator-error poles at {-5±5 d) Check the entire set of eigenvalues of the estimator.
(Full Order Observer). Given the following state space equations =1-5-251-1 -1 0 1 0 CID | a) Determine if the system is stable. b) Is the system Observable? Detectable? c) Design a full order observer that places the estimator-error poles at {-5±5 d) Check the entire set of eigenvalues of the estimator.
 Please show all work and write neatly so that I can understand.
All
information is given
Problem 4 The state-space equations for the simple pendulum is 0 1 25 02 T2 C2 a) Design a state feedback controller such that the roots of the closed-loop characteristic equation arc at s-41 4j b) Design an estimator that reconstructs the state of the pendulum. Pick the estimator roots to be at s--10 ± 10, (Make sure to provide the dynamics equation of...
Please show all work and write neatly so that I can understand.
All
information is given
Problem 4 The state-space equations for the simple pendulum is 0 1 25 02 T2 C2 a) Design a state feedback controller such that the roots of the closed-loop characteristic equation arc at s-41 4j b) Design an estimator that reconstructs the state of the pendulum. Pick the estimator roots to be at s--10 ± 10, (Make sure to provide the dynamics equation of...
 Please only solve part C
Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with the difference equation in Problem 1 on Homework 2. This parenthetical comment is not a required part for Homework 8.) 2. 0.048371 u(n) 1.9048x(n) lo.04679 [1,0]x(n) y(n) Compute the open-loop eigenvalues of the system. That is, find the eigenvalues of Ф. Check controllability of the system. Or, answer the...
Please only solve part C
Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with the difference equation in Problem 1 on Homework 2. This parenthetical comment is not a required part for Homework 8.) 2. 0.048371 u(n) 1.9048x(n) lo.04679 [1,0]x(n) y(n) Compute the open-loop eigenvalues of the system. That is, find the eigenvalues of Ф. Check controllability of the system. Or, answer the...
 Test 1 2: A state space representation of a system is given by: -2 011 y=[0 1]x 1. Design a state variable feedback control to place the closed-loop poles s =-3 ±j2. Assume that the complete state vector is available for feedback.。 Find the resulted close loop transfer function.
Test 1 2: A state space representation of a system is given by: -2 011 y=[0 1]x 1. Design a state variable feedback control to place the closed-loop poles s =-3 ±j2. Assume that the complete state vector is available for feedback.。 Find the resulted close loop transfer function.
 Question 1 [Total 20 marks] (a) [5 marks] In a steady-state two-dimensional heat flow problem, the temperature, u, at any point in the domain (t, ) satisfies the differential equation u y(2-y) u= U0F With the given temperature boundary condition as follows: u(x, 0) = 0, u(x, 2) = x(4-x), 0 < x < 4 Calculate the temperature at the interior points a, b, and c using a mesh size h-1.
Question 1 [Total 20 marks] (a) [5 marks] In...
Question 1 [Total 20 marks] (a) [5 marks] In a steady-state two-dimensional heat flow problem, the temperature, u, at any point in the domain (t, ) satisfies the differential equation u y(2-y) u= U0F With the given temperature boundary condition as follows: u(x, 0) = 0, u(x, 2) = x(4-x), 0 < x < 4 Calculate the temperature at the interior points a, b, and c using a mesh size h-1.
Question 1 [Total 20 marks] (a) [5 marks] In...
 Please answer as neatly as possible.
Much thanks in advance!
Question 1:
6. In Problem 1, show that θ2 is a consistent estimator for θ. Deduce that Y(n) is a consistent estimator for θ and also asyınpt○tically unbiased estimator for θ. 1. Let Yi, ½, . . . ,y, denote a random sample from an uniform distribution on the interval (0,0). We have seen that (1) and 62 Ym are unbiased estimators for 0. Find the efficiency of 6 relative...
Please answer as neatly as possible.
Much thanks in advance!
Question 1:
6. In Problem 1, show that θ2 is a consistent estimator for θ. Deduce that Y(n) is a consistent estimator for θ and also asyınpt○tically unbiased estimator for θ. 1. Let Yi, ½, . . . ,y, denote a random sample from an uniform distribution on the interval (0,0). We have seen that (1) and 62 Ym are unbiased estimators for 0. Find the efficiency of 6 relative...
 a-represent system in state space form?
b-find output response y(t?
c-design a state feedback gain controller?
3- A dynamic system is described by the following set of coupled linear ordinary differential equations: x1 + 2x1-4x2-5u x1-x2 + 4x1 + x2 = 5u EDQMS 2/3 Page 1 of 2 a. Represent the system in state-space form. b. For u(t) =1 and initial condition state vector x(0) = LII find the outp (10 marks) response y(t). c. Design a state feedback gain...
a-represent system in state space form?
b-find output response y(t?
c-design a state feedback gain controller?
3- A dynamic system is described by the following set of coupled linear ordinary differential equations: x1 + 2x1-4x2-5u x1-x2 + 4x1 + x2 = 5u EDQMS 2/3 Page 1 of 2 a. Represent the system in state-space form. b. For u(t) =1 and initial condition state vector x(0) = LII find the outp (10 marks) response y(t). c. Design a state feedback gain...
 Can someone please explain how to solve the problem below?
6. State Space Systems: a. (5 pts) Determine the state space system in controllable canonical form that implements the transfer function Y(s)_ 252 +5 U(s) s+4s+7s +12 b. (10 pts) For the state space system given below, design a controller u =-Kx+v such that the eigenvalues of the closed loop system are -10, – 20. To 17 , y = Cx C = [25] x = Ax+Bu with A= ln...
Can someone please explain how to solve the problem below?
6. State Space Systems: a. (5 pts) Determine the state space system in controllable canonical form that implements the transfer function Y(s)_ 252 +5 U(s) s+4s+7s +12 b. (10 pts) For the state space system given below, design a controller u =-Kx+v such that the eigenvalues of the closed loop system are -10, – 20. To 17 , y = Cx C = [25] x = Ax+Bu with A= ln...
 In a steady-state two-dimensional heat flow problem, the temperature, u, at any point in the domain (x, y) satisfies the following differential equation. With the given temperature boundary condition, find the internal temperature at points a, b, and c using a numerical method. 0 4 4
In a steady-state two-dimensional heat flow problem, the temperature, u, at any point in the domain (x, y) satisfies the following differential equation. With the given temperature boundary condition, find the internal temperature at...
In a steady-state two-dimensional heat flow problem, the temperature, u, at any point in the domain (x, y) satisfies the following differential equation. With the given temperature boundary condition, find the internal temperature at points a, b, and c using a numerical method. 0 4 4
In a steady-state two-dimensional heat flow problem, the temperature, u, at any point in the domain (x, y) satisfies the following differential equation. With the given temperature boundary condition, find the internal temperature at...
 Q3. The state-space representation of a dynamical system is given as follows: (2) (y = 2 x 1. By finding the eigenvalues, eigenvectors of the A matrix, compute el via the diagonal transformation. 2. Assume that the control input is u(t) = 0, compute x(1) and y(t). 3. Assume that the input is u(t) = 1 + 2e-21, compute x(t) and y(t). 4. Given your answers to the previous question, compute x(t) when 1 00
Q3. The state-space representation of a dynamical system is given as follows: (2) (y = 2 x 1. By finding the eigenvalues, eigenvectors of the A matrix, compute el via the diagonal transformation. 2. Assume that the control input is u(t) = 0, compute x(1) and y(t). 3. Assume that the input is u(t) = 1 + 2e-21, compute x(t) and y(t). 4. Given your answers to the previous question, compute x(t) when 1 00
Most questions answered within 3 hours.
-
This is a homework for MATLAB. Please answer using MATLAB
functions and parameters. The answers are...
asked 1 minute from now -
1. Which of the following is a cost of unemployment? a.
Unemployed individuals suffer a loss...
asked 11 minutes ago -
What z Score do we need in order to have a total of 1% (or less)...
asked 17 minutes ago -
Which of the following is a query that you CANNOT write in
Standard SQL over a...
asked 27 minutes ago -
If all I have is a mean concentration, how can I
calculate the overall confidence limit,...
asked 22 minutes ago -
In the lab, you prepare a solution in a 150 mL volumetric flask
by mixing 25.0...
asked 28 minutes ago -
1. Consider the reaction: 2 NO (g) + 2 H2 (g) → N2 (g) + 2...
asked 29 minutes ago -
The equilibrium constant for the dissociation of trichloroacetic
acid at STP is 1.995 x 10^-1. What...
asked 37 minutes ago -
An ideal gas is confined to a container with constant volume.
The number of moles is...
asked 45 minutes ago -
FIVE-PART PROBLEM: The visible spectrum of colors ranges
from approximately 380 nm in wavelength at the...
asked 48 minutes ago -
Brooke and Georgia are neighbors. Each have 40 hours per week.
Brooke needs 5 hours to...
asked 1 hour ago -
Quantitative Problem: You are holding a
portfolio with the following investments and betas:
Stock
Dollar investment...
asked 1 hour ago