
Homework Answers
Answer:
given the
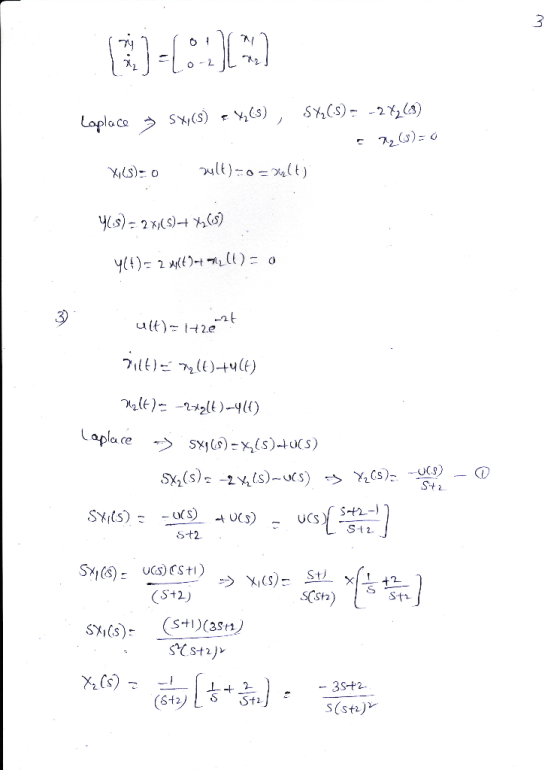
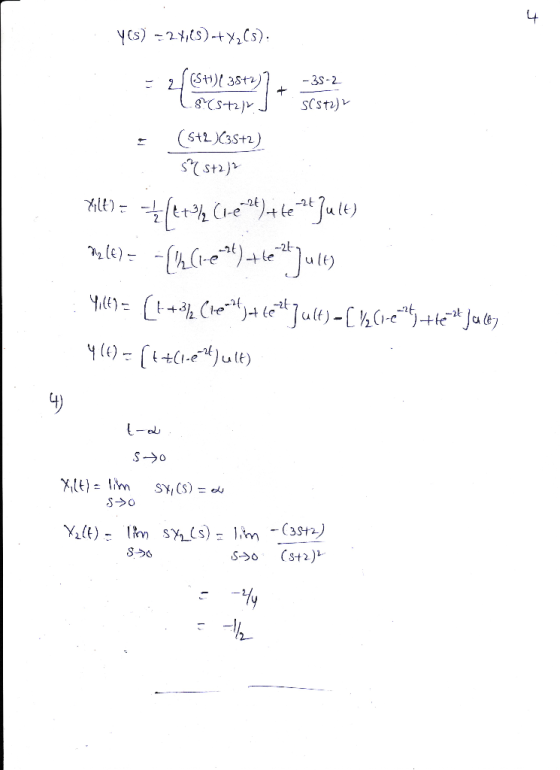
The state space representation of a dynamical system is given as follows
![5*=(3-13m +17 1 9 = (2 1Jn 7=66-23-+{-1} Y = [21] A5 0-) B:{] <= (211) . for eigen vakes 10-21)=0 1900)-(-) +17 TO 10- 21 1](http://img.homeworklib.com/questions/c0d68040-a0c2-11eb-99a2-e795699109cf.png?x-oss-process=image/resize,w_560)
![2= -2 2 17w LOOJl =) auto=0 - - - - - 272 bt 2] PCHE ente l(98-03- SL-R = []-[:-] - [50] (31-03= abre ] SI-A=1 0 ron LOS L](http://img.homeworklib.com/questions/c15e6d60-a0c2-11eb-91c1-47570b0f2492.png?x-oss-process=image/resize,w_560)
Add Answer to:
Q3. The state-space representation of a dynamical system is given as follows: (2) (y = 2...
Please only solve part C Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with th...
 Please only solve part C
Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with the difference equation in Problem 1 on Homework 2. This parenthetical comment is not a required part for Homework 8.) 2. 0.048371 u(n) 1.9048x(n) lo.04679 [1,0]x(n) y(n) Compute the open-loop eigenvalues of the system. That is, find the eigenvalues of Ф. Check controllability of the system. Or, answer the...
Please only solve part C
Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with the difference equation in Problem 1 on Homework 2. This parenthetical comment is not a required part for Homework 8.) 2. 0.048371 u(n) 1.9048x(n) lo.04679 [1,0]x(n) y(n) Compute the open-loop eigenvalues of the system. That is, find the eigenvalues of Ф. Check controllability of the system. Or, answer the...
Problem 2 (Eigenvalues and Eigenvectors). (a) If R2-R2 be defined by f(x,y) = (y,z), then find al...
 please answer both a and b
Problem 2 (Eigenvalues and Eigenvectors). (a) If R2-R2 be defined by f(x,y) = (y,z), then find all the eigenvalues and eigenvectors of f Hint: Use the matrix representation. (b) Let U be a vector subspace (U o, V) of a finite dimensional vector space V. Show that there exists a linear transformation V V such that U is not an invariant subspace of f. Hence, or otherwise, show that: a vector subspace U-o or...
please answer both a and b
Problem 2 (Eigenvalues and Eigenvectors). (a) If R2-R2 be defined by f(x,y) = (y,z), then find all the eigenvalues and eigenvectors of f Hint: Use the matrix representation. (b) Let U be a vector subspace (U o, V) of a finite dimensional vector space V. Show that there exists a linear transformation V V such that U is not an invariant subspace of f. Hence, or otherwise, show that: a vector subspace U-o or...
Problem 2 (Eigenvalues and Eigenvectors). (a) If R2 4 R2 be defined by f(x,y) (y,x), then find al...
 Problem 2 (Eigenvalues and Eigenvectors). (a) If R2 4 R2 be defined by f(x,y) (y,x), then find all the eigenvalues and eigenvectors of f Hint: Use the matrix representation. (b) Let U be a vector subspace (U o, V) of a finite dimensional vector space V. Show that there exists a linear transformation V V such that U is not an invariant subspace of f Hence, or otherwise, show that: a vector subspace U-0 or U = V, if and...
Problem 2 (Eigenvalues and Eigenvectors). (a) If R2 4 R2 be defined by f(x,y) (y,x), then find all the eigenvalues and eigenvectors of f Hint: Use the matrix representation. (b) Let U be a vector subspace (U o, V) of a finite dimensional vector space V. Show that there exists a linear transformation V V such that U is not an invariant subspace of f Hence, or otherwise, show that: a vector subspace U-0 or U = V, if and...
Font Styles Paragraph Definition 1: Given La linear transformation from a vector space V into itself,...
 Font Styles Paragraph Definition 1: Given La linear transformation from a vector space V into itself, we say that is diagonalizable iff there exists a basis S relevant to which can be represented by a diagonal matrix D. Definition 2: If the matrix A represents the linear transformation L with respect to the basis S, then the eigenvalues of L are the eigenvalues of the matrix A. I Definition 3: If the matrix A represents the linear transformation L with...
Font Styles Paragraph Definition 1: Given La linear transformation from a vector space V into itself, we say that is diagonalizable iff there exists a basis S relevant to which can be represented by a diagonal matrix D. Definition 2: If the matrix A represents the linear transformation L with respect to the basis S, then the eigenvalues of L are the eigenvalues of the matrix A. I Definition 3: If the matrix A represents the linear transformation L with...
Test 1 2: A state space representation of a system is given by: -2 011 y=[0...
 Test 1 2: A state space representation of a system is given by: -2 011 y=[0 1]x 1. Design a state variable feedback control to place the closed-loop poles s =-3 ±j2. Assume that the complete state vector is available for feedback.。 Find the resulted close loop transfer function.
Test 1 2: A state space representation of a system is given by: -2 011 y=[0 1]x 1. Design a state variable feedback control to place the closed-loop poles s =-3 ±j2. Assume that the complete state vector is available for feedback.。 Find the resulted close loop transfer function.
9. A control system is given by the following state-space representation -8 101 [2 dt 1-6 00 y [1...
 this problem needs to be done using SciLab
9. A control system is given by the following state-space representation -8 101 [2 dt 1-6 00 y [1 0 0]x Please do the following: a. Find its transfer function representation. b. Calculate its zeros and poles c. Write a Scilab program to draw the step response and impulse response graphs in the same window with the step response graph in the upper half the window and the impuise response graph in...
this problem needs to be done using SciLab
9. A control system is given by the following state-space representation -8 101 [2 dt 1-6 00 y [1 0 0]x Please do the following: a. Find its transfer function representation. b. Calculate its zeros and poles c. Write a Scilab program to draw the step response and impulse response graphs in the same window with the step response graph in the upper half the window and the impuise response graph in...
Problem 4: (65 points) Let a system be given by the state space representation 8 8...
 Problem 4: (65 points) Let a system be given by the state space representation 8 8 10 * = X+ u(t), y = [1 -1]x – u(t) 1 1 -1 0 Y(S) d) (7) Find the transfer function US) e) (5) Is the system BIBO stable? 3 f) (9) Let the initial state x(0) -3 u(t) = 0) for all t > 0. = Find the zero input response (i.e., with the input
Problem 4: (65 points) Let a system be given by the state space representation 8 8 10 * = X+ u(t), y = [1 -1]x – u(t) 1 1 -1 0 Y(S) d) (7) Find the transfer function US) e) (5) Is the system BIBO stable? 3 f) (9) Let the initial state x(0) -3 u(t) = 0) for all t > 0. = Find the zero input response (i.e., with the input
8. Write down the state space equation for the system shown below US) + 2 y(s)...
 8. Write down the state space equation for the system shown below US) + 2 y(s) $+3 2 s(s+1) 9. Derive the state space equation for the system shown where the coefficients of the system matrix are in diagonal form and the elements of the control matrix are unity. U(S) 1 X2 $+2 X 3+1 X = y $+3 $+4 S
8. Write down the state space equation for the system shown below US) + 2 y(s) $+3 2 s(s+1) 9. Derive the state space equation for the system shown where the coefficients of the system matrix are in diagonal form and the elements of the control matrix are unity. U(S) 1 X2 $+2 X 3+1 X = y $+3 $+4 S
15% - 3 – A system has a state variable representation as below face) = (4)...
 15% - 3 – A system has a state variable representation as below face) = (4) (0) + (C) u(e) y(t) = (1 0)x(t) It is desired that the canonical diagonal form of the system to be fact) = (94) z(t) + (7) u(t) y(t) = (-5 5)2(t) Determine the parameters a, b and d to yield the required diagonal matrix.
15% - 3 – A system has a state variable representation as below face) = (4) (0) + (C) u(e) y(t) = (1 0)x(t) It is desired that the canonical diagonal form of the system to be fact) = (94) z(t) + (7) u(t) y(t) = (-5 5)2(t) Determine the parameters a, b and d to yield the required diagonal matrix.
Given a linear time-invariant system in state-space representation: -100 5*+u(t) y=[1 0]x (i) Determine the transfer...
 Given a linear time-invariant system in state-space representation: -100 5*+u(t) y=[1 0]x (i) Determine the transfer function of the system. (ii) Build an equivalent mechanical system showing all the parameters. (ii) Derive an expression x(t) for this system for step input. Is the mechanical system over damped, under damped or critically damped system?
Given a linear time-invariant system in state-space representation: -100 5*+u(t) y=[1 0]x (i) Determine the transfer function of the system. (ii) Build an equivalent mechanical system showing all the parameters. (ii) Derive an expression x(t) for this system for step input. Is the mechanical system over damped, under damped or critically damped system?
 Please only solve part C
Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with the difference equation in Problem 1 on Homework 2. This parenthetical comment is not a required part for Homework 8.) 2. 0.048371 u(n) 1.9048x(n) lo.04679 [1,0]x(n) y(n) Compute the open-loop eigenvalues of the system. That is, find the eigenvalues of Ф. Check controllability of the system. Or, answer the...
Please only solve part C
Assume the following state space representation of a discrete-time servomotor system. (As a review for the Final Exam, you might check this state space representation with the difference equation in Problem 1 on Homework 2. This parenthetical comment is not a required part for Homework 8.) 2. 0.048371 u(n) 1.9048x(n) lo.04679 [1,0]x(n) y(n) Compute the open-loop eigenvalues of the system. That is, find the eigenvalues of Ф. Check controllability of the system. Or, answer the...
 please answer both a and b
Problem 2 (Eigenvalues and Eigenvectors). (a) If R2-R2 be defined by f(x,y) = (y,z), then find all the eigenvalues and eigenvectors of f Hint: Use the matrix representation. (b) Let U be a vector subspace (U o, V) of a finite dimensional vector space V. Show that there exists a linear transformation V V such that U is not an invariant subspace of f. Hence, or otherwise, show that: a vector subspace U-o or...
please answer both a and b
Problem 2 (Eigenvalues and Eigenvectors). (a) If R2-R2 be defined by f(x,y) = (y,z), then find all the eigenvalues and eigenvectors of f Hint: Use the matrix representation. (b) Let U be a vector subspace (U o, V) of a finite dimensional vector space V. Show that there exists a linear transformation V V such that U is not an invariant subspace of f. Hence, or otherwise, show that: a vector subspace U-o or...
 Problem 2 (Eigenvalues and Eigenvectors). (a) If R2 4 R2 be defined by f(x,y) (y,x), then find all the eigenvalues and eigenvectors of f Hint: Use the matrix representation. (b) Let U be a vector subspace (U o, V) of a finite dimensional vector space V. Show that there exists a linear transformation V V such that U is not an invariant subspace of f Hence, or otherwise, show that: a vector subspace U-0 or U = V, if and...
Problem 2 (Eigenvalues and Eigenvectors). (a) If R2 4 R2 be defined by f(x,y) (y,x), then find all the eigenvalues and eigenvectors of f Hint: Use the matrix representation. (b) Let U be a vector subspace (U o, V) of a finite dimensional vector space V. Show that there exists a linear transformation V V such that U is not an invariant subspace of f Hence, or otherwise, show that: a vector subspace U-0 or U = V, if and...
 Font Styles Paragraph Definition 1: Given La linear transformation from a vector space V into itself, we say that is diagonalizable iff there exists a basis S relevant to which can be represented by a diagonal matrix D. Definition 2: If the matrix A represents the linear transformation L with respect to the basis S, then the eigenvalues of L are the eigenvalues of the matrix A. I Definition 3: If the matrix A represents the linear transformation L with...
Font Styles Paragraph Definition 1: Given La linear transformation from a vector space V into itself, we say that is diagonalizable iff there exists a basis S relevant to which can be represented by a diagonal matrix D. Definition 2: If the matrix A represents the linear transformation L with respect to the basis S, then the eigenvalues of L are the eigenvalues of the matrix A. I Definition 3: If the matrix A represents the linear transformation L with...
 Test 1 2: A state space representation of a system is given by: -2 011 y=[0 1]x 1. Design a state variable feedback control to place the closed-loop poles s =-3 ±j2. Assume that the complete state vector is available for feedback.。 Find the resulted close loop transfer function.
Test 1 2: A state space representation of a system is given by: -2 011 y=[0 1]x 1. Design a state variable feedback control to place the closed-loop poles s =-3 ±j2. Assume that the complete state vector is available for feedback.。 Find the resulted close loop transfer function.
 this problem needs to be done using SciLab
9. A control system is given by the following state-space representation -8 101 [2 dt 1-6 00 y [1 0 0]x Please do the following: a. Find its transfer function representation. b. Calculate its zeros and poles c. Write a Scilab program to draw the step response and impulse response graphs in the same window with the step response graph in the upper half the window and the impuise response graph in...
this problem needs to be done using SciLab
9. A control system is given by the following state-space representation -8 101 [2 dt 1-6 00 y [1 0 0]x Please do the following: a. Find its transfer function representation. b. Calculate its zeros and poles c. Write a Scilab program to draw the step response and impulse response graphs in the same window with the step response graph in the upper half the window and the impuise response graph in...
 Problem 4: (65 points) Let a system be given by the state space representation 8 8 10 * = X+ u(t), y = [1 -1]x – u(t) 1 1 -1 0 Y(S) d) (7) Find the transfer function US) e) (5) Is the system BIBO stable? 3 f) (9) Let the initial state x(0) -3 u(t) = 0) for all t > 0. = Find the zero input response (i.e., with the input
Problem 4: (65 points) Let a system be given by the state space representation 8 8 10 * = X+ u(t), y = [1 -1]x – u(t) 1 1 -1 0 Y(S) d) (7) Find the transfer function US) e) (5) Is the system BIBO stable? 3 f) (9) Let the initial state x(0) -3 u(t) = 0) for all t > 0. = Find the zero input response (i.e., with the input
 8. Write down the state space equation for the system shown below US) + 2 y(s) $+3 2 s(s+1) 9. Derive the state space equation for the system shown where the coefficients of the system matrix are in diagonal form and the elements of the control matrix are unity. U(S) 1 X2 $+2 X 3+1 X = y $+3 $+4 S
8. Write down the state space equation for the system shown below US) + 2 y(s) $+3 2 s(s+1) 9. Derive the state space equation for the system shown where the coefficients of the system matrix are in diagonal form and the elements of the control matrix are unity. U(S) 1 X2 $+2 X 3+1 X = y $+3 $+4 S
 15% - 3 – A system has a state variable representation as below face) = (4) (0) + (C) u(e) y(t) = (1 0)x(t) It is desired that the canonical diagonal form of the system to be fact) = (94) z(t) + (7) u(t) y(t) = (-5 5)2(t) Determine the parameters a, b and d to yield the required diagonal matrix.
15% - 3 – A system has a state variable representation as below face) = (4) (0) + (C) u(e) y(t) = (1 0)x(t) It is desired that the canonical diagonal form of the system to be fact) = (94) z(t) + (7) u(t) y(t) = (-5 5)2(t) Determine the parameters a, b and d to yield the required diagonal matrix.
 Given a linear time-invariant system in state-space representation: -100 5*+u(t) y=[1 0]x (i) Determine the transfer function of the system. (ii) Build an equivalent mechanical system showing all the parameters. (ii) Derive an expression x(t) for this system for step input. Is the mechanical system over damped, under damped or critically damped system?
Given a linear time-invariant system in state-space representation: -100 5*+u(t) y=[1 0]x (i) Determine the transfer function of the system. (ii) Build an equivalent mechanical system showing all the parameters. (ii) Derive an expression x(t) for this system for step input. Is the mechanical system over damped, under damped or critically damped system?
Most questions answered within 3 hours.
-
With a $16 Trillion national ebt, and projected annual budget
eficits in excess of $1 Trillion...
asked 2 minutes from now -
A machine shop owner wishes to assign each of three machinists
(labeled 1, 2, and 3)...
asked 11 minutes ago -
Regarding language development, which of the following
statements is FALSE?
Babies are able to cry from...
asked 11 minutes ago -
A couple of small ice cubes at 0 °C are added to glass of warm
water...
asked 9 minutes ago -
Slow 'n Steady, Inc., has a stock price of $30, will pay a
dividend next year...
asked 13 minutes ago -
During the current financial year, the owner of Omega
Enterprises withdrew supplies of $2,000 for personal...
asked 9 minutes ago -
PLEASE SHOW MATH CALCULATION(formulas)it has to be done on excel
P12-4 Last year (2016), Richter Condos...
asked 17 minutes ago -
A 0.25μF capacitor is charged to 50 V . It is then connected in
series with...
asked 33 minutes ago -
Calculate the current, I, through the batteries for:
- a 2-bulb parallel circuit
- How does...
asked 35 minutes ago -
Choose the sentence that uses correct punctuation.
1a. The prefatory parts of a report include the...
asked 41 minutes ago -
For the element arsenic, which one of the following sets of
quantum numbers could not apply...
asked 50 minutes ago -
Compare and contrast the architectures of 3 types of ADCs:
Flash, SAR, and pipelined. Use the...
asked 51 minutes ago