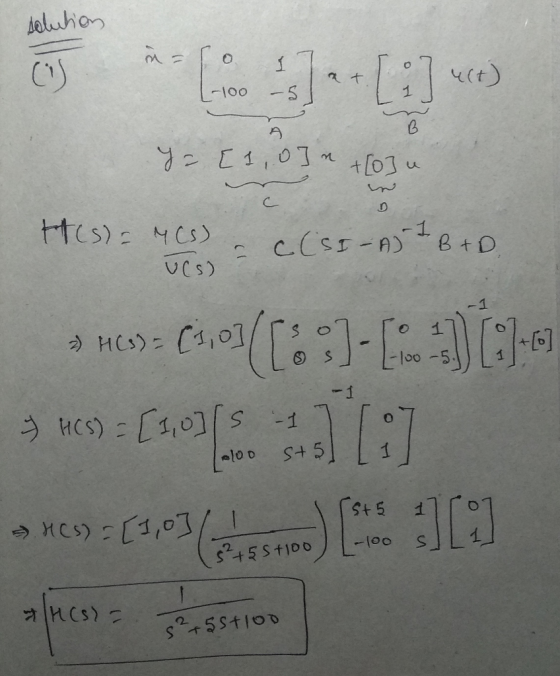
![Given a linear time-invariant system in state-space representation: -100 5*+u(t) y=[1 0]x (i) Determine the transfer function of the system. (ii) Build an equivalent mechanical system showing all the parameters. (ii) Derive an expression x(t) for this system for step input. Is the mechanical system over damped, under damped or critically damped system?](http://img.homeworklib.com/questions/04b6ebc0-3fa0-11eb-b474-a3bbaa6d4277.png?x-oss-process=image/resize,w_560)
Homework Answers
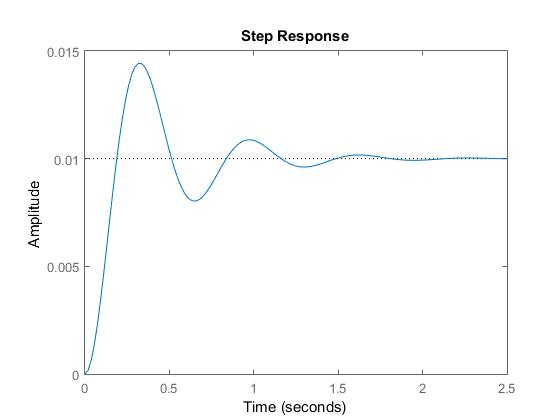
 iii.Matlab
code
iii.Matlab
code
clc, clear all,close all
a=[0 1;-100 -5];
b=[0;1];
c=[1 0];
sys=ss(a,b,c,0);
step(sys)
Result
Add Answer to:
Given a linear time-invariant system in state-space representation: -100 5*+u(t) y=[1 0]x (i) Determine the transfer...
3. a) Find a state space representation for a linear system represented by the following differen...
 3. a) Find a state space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(1) is the output: b) Consider a linear system represented by the following differential equation, where x() denotes the input and y(t) is the output: )+4()+4y()x(t) i) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input that has...
3. a) Find a state space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(1) is the output: b) Consider a linear system represented by the following differential equation, where x() denotes the input and y(t) is the output: )+4()+4y()x(t) i) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input that has...
Find the zero-state response of the linear system with transfer function with an > 0 and 0 <くく1, when the input u(t) is the unit step, that is, u(t)-1(t), for 12 o, using both 1) the transfer...
 Find the zero-state response of the linear system with transfer function with an > 0 and 0 <くく1, when the input u(t) is the unit step, that is, u(t)-1(t), for 12 o, using both 1) the transfer function approach and 2) the convolution approach
Find the zero-state response of the linear system with transfer function with an > 0 and 0
Find the zero-state response of the linear system with transfer function with an > 0 and 0 <くく1, when the input u(t) is the unit step, that is, u(t)-1(t), for 12 o, using both 1) the transfer function approach and 2) the convolution approach
Find the zero-state response of the linear system with transfer function with an > 0 and 0
A linear time invariant system has an impulse response given by h[n] = 2(-0.5)" u[n] –...
 A linear time invariant system has an impulse response given by h[n] = 2(-0.5)" u[n] – 3(0.5)2º u[n] where u[n] is the unit step function. a) Find the z-domain transfer function H(2). b) Draw pole-zero plot of the system and indicate the region of convergence. c) is the system stable? Explain. d) is the system causal? Explain. e) Find the unit step response s[n] of the system, that is, the response to the unit step input. f) Provide a linear...
A linear time invariant system has an impulse response given by h[n] = 2(-0.5)" u[n] – 3(0.5)2º u[n] where u[n] is the unit step function. a) Find the z-domain transfer function H(2). b) Draw pole-zero plot of the system and indicate the region of convergence. c) is the system stable? Explain. d) is the system causal? Explain. e) Find the unit step response s[n] of the system, that is, the response to the unit step input. f) Provide a linear...
For a continuous time linear time-invariant system, the input-output relation is the following (x(t) the input, y(t) the...
 For a continuous time linear time-invariant system, the
input-output relation is the following (x(t) the input, y(t)
the
output):
, where h(t) is the impulse response function of the
system.
Please explain why a signal like e/“* is always an eigenvector
of
this linear map for any w. Also, if ¥(w),X(w),and H(w) are
the
Fourier transforms of y(t),x(t),and h(t), respectively.
Please
derive in detail the relation between Y(w),X(w),and H(w),
which means to reproduce the proof of the basic convolution
property...
For a continuous time linear time-invariant system, the
input-output relation is the following (x(t) the input, y(t)
the
output):
, where h(t) is the impulse response function of the
system.
Please explain why a signal like e/“* is always an eigenvector
of
this linear map for any w. Also, if ¥(w),X(w),and H(w) are
the
Fourier transforms of y(t),x(t),and h(t), respectively.
Please
derive in detail the relation between Y(w),X(w),and H(w),
which means to reproduce the proof of the basic convolution
property...
8 The transfer function of a linear time invariant system is given as G(s) = 10/(S2...
 8 The transfer function of a linear time invariant system is given as G(s) = 10/(S2 + 10s + 10). The steady state value of the output of the system for step input (R(s) = 1/s^2) will be: DS (3 Points) 100 0.1 O infinity None of them 0.01 1 10
8 The transfer function of a linear time invariant system is given as G(s) = 10/(S2 + 10s + 10). The steady state value of the output of the system for step input (R(s) = 1/s^2) will be: DS (3 Points) 100 0.1 O infinity None of them 0.01 1 10
3. a) Find a sate space representation for a linear system represented by the following different...
 3. a) Find a sate space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(0) is the output: 4y(t)- 2(t)-2y(t)3(t) b) Consider a linear system represented by the following differential equation, where st) denotes the input and yt) is the output: )+4() +4y(t)x(t) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input...
3. a) Find a sate space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(0) is the output: 4y(t)- 2(t)-2y(t)3(t) b) Consider a linear system represented by the following differential equation, where st) denotes the input and yt) is the output: )+4() +4y(t)x(t) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input...
Problem 4: (65 points) Let a system be given by the state space representation 8 8...
 Problem 4: (65 points) Let a system be given by the state space representation 8 8 10 * = X+ u(t), y = [1 -1]x – u(t) 1 1 -1 0 Y(S) d) (7) Find the transfer function US) e) (5) Is the system BIBO stable? 3 f) (9) Let the initial state x(0) -3 u(t) = 0) for all t > 0. = Find the zero input response (i.e., with the input
Problem 4: (65 points) Let a system be given by the state space representation 8 8 10 * = X+ u(t), y = [1 -1]x – u(t) 1 1 -1 0 Y(S) d) (7) Find the transfer function US) e) (5) Is the system BIBO stable? 3 f) (9) Let the initial state x(0) -3 u(t) = 0) for all t > 0. = Find the zero input response (i.e., with the input
b) The transfer function of a causal linear time-invariant (LTI) discrete-time system is given by: 1+0.6z1-0.5z1 i Does...
 b) The transfer function of a causal linear time-invariant (LTI) discrete-time system is given by: 1+0.6z1-0.5z1 i Does the system have a finite impulse response (FIR) or infinite 3 impulse response (IIR)? Explain why. ii Determine the impulse response h[n] of the above system iii) Suppose that the system above was designed using the bilinear transformation method with sampling period T-0.5 s. Determine its original analogue transfer function.
b) The transfer function of a causal linear time-invariant (LTI) discrete-time system...
b) The transfer function of a causal linear time-invariant (LTI) discrete-time system is given by: 1+0.6z1-0.5z1 i Does the system have a finite impulse response (FIR) or infinite 3 impulse response (IIR)? Explain why. ii Determine the impulse response h[n] of the above system iii) Suppose that the system above was designed using the bilinear transformation method with sampling period T-0.5 s. Determine its original analogue transfer function.
b) The transfer function of a causal linear time-invariant (LTI) discrete-time system...
Consider a linear, time-invariant system with an input given by X(T) = A, sin(Wit) where w,...
 Consider a linear, time-invariant system with an input given by X(T) = A, sin(Wit) where w, is a specific frequency. The system has a frequency response given by the amplitude ratio (magnitude ratio) as a function of the frequency, Mw), and the phase difference as a function of frequency, °W). Write an expression for the corresponding output in terms of the input amplitude, A1, the input frequency, W1, the amplitude ratio, and the phase difference.
Consider a linear, time-invariant system with an input given by X(T) = A, sin(Wit) where w, is a specific frequency. The system has a frequency response given by the amplitude ratio (magnitude ratio) as a function of the frequency, Mw), and the phase difference as a function of frequency, °W). Write an expression for the corresponding output in terms of the input amplitude, A1, the input frequency, W1, the amplitude ratio, and the phase difference.
10.Represent the translational mechanical system shown in the Figure in state- space, where xX3(t) is the...
 10.Represent the translational mechanical system shown in the Figure in state- space, where xX3(t) is the output IN- 11.Find the state equations and output equation for the phase-variable representation of the transfer function G(s) 2s+1/(s2+7s+ 9) 12. Convert the state and output equations shown to a transfer function. -1.5 2 u(t) X = X 4 0 Y [1.5 0.625]x 13. For each system shown, write the state equations and the output equation for the phase- variable representation 8s10 sh25 t26...
10.Represent the translational mechanical system shown in the Figure in state- space, where xX3(t) is the output IN- 11.Find the state equations and output equation for the phase-variable representation of the transfer function G(s) 2s+1/(s2+7s+ 9) 12. Convert the state and output equations shown to a transfer function. -1.5 2 u(t) X = X 4 0 Y [1.5 0.625]x 13. For each system shown, write the state equations and the output equation for the phase- variable representation 8s10 sh25 t26...
 3. a) Find a state space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(1) is the output: b) Consider a linear system represented by the following differential equation, where x() denotes the input and y(t) is the output: )+4()+4y()x(t) i) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input that has...
3. a) Find a state space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(1) is the output: b) Consider a linear system represented by the following differential equation, where x() denotes the input and y(t) is the output: )+4()+4y()x(t) i) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input that has...
 Find the zero-state response of the linear system with transfer function with an > 0 and 0 <くく1, when the input u(t) is the unit step, that is, u(t)-1(t), for 12 o, using both 1) the transfer function approach and 2) the convolution approach
Find the zero-state response of the linear system with transfer function with an > 0 and 0
Find the zero-state response of the linear system with transfer function with an > 0 and 0 <くく1, when the input u(t) is the unit step, that is, u(t)-1(t), for 12 o, using both 1) the transfer function approach and 2) the convolution approach
Find the zero-state response of the linear system with transfer function with an > 0 and 0
 A linear time invariant system has an impulse response given by h[n] = 2(-0.5)" u[n] – 3(0.5)2º u[n] where u[n] is the unit step function. a) Find the z-domain transfer function H(2). b) Draw pole-zero plot of the system and indicate the region of convergence. c) is the system stable? Explain. d) is the system causal? Explain. e) Find the unit step response s[n] of the system, that is, the response to the unit step input. f) Provide a linear...
A linear time invariant system has an impulse response given by h[n] = 2(-0.5)" u[n] – 3(0.5)2º u[n] where u[n] is the unit step function. a) Find the z-domain transfer function H(2). b) Draw pole-zero plot of the system and indicate the region of convergence. c) is the system stable? Explain. d) is the system causal? Explain. e) Find the unit step response s[n] of the system, that is, the response to the unit step input. f) Provide a linear...
 For a continuous time linear time-invariant system, the
input-output relation is the following (x(t) the input, y(t)
the
output):
, where h(t) is the impulse response function of the
system.
Please explain why a signal like e/“* is always an eigenvector
of
this linear map for any w. Also, if ¥(w),X(w),and H(w) are
the
Fourier transforms of y(t),x(t),and h(t), respectively.
Please
derive in detail the relation between Y(w),X(w),and H(w),
which means to reproduce the proof of the basic convolution
property...
For a continuous time linear time-invariant system, the
input-output relation is the following (x(t) the input, y(t)
the
output):
, where h(t) is the impulse response function of the
system.
Please explain why a signal like e/“* is always an eigenvector
of
this linear map for any w. Also, if ¥(w),X(w),and H(w) are
the
Fourier transforms of y(t),x(t),and h(t), respectively.
Please
derive in detail the relation between Y(w),X(w),and H(w),
which means to reproduce the proof of the basic convolution
property...
 8 The transfer function of a linear time invariant system is given as G(s) = 10/(S2 + 10s + 10). The steady state value of the output of the system for step input (R(s) = 1/s^2) will be: DS (3 Points) 100 0.1 O infinity None of them 0.01 1 10
8 The transfer function of a linear time invariant system is given as G(s) = 10/(S2 + 10s + 10). The steady state value of the output of the system for step input (R(s) = 1/s^2) will be: DS (3 Points) 100 0.1 O infinity None of them 0.01 1 10
 3. a) Find a sate space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(0) is the output: 4y(t)- 2(t)-2y(t)3(t) b) Consider a linear system represented by the following differential equation, where st) denotes the input and yt) is the output: )+4() +4y(t)x(t) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input...
3. a) Find a sate space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(0) is the output: 4y(t)- 2(t)-2y(t)3(t) b) Consider a linear system represented by the following differential equation, where st) denotes the input and yt) is the output: )+4() +4y(t)x(t) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input...
 Problem 4: (65 points) Let a system be given by the state space representation 8 8 10 * = X+ u(t), y = [1 -1]x – u(t) 1 1 -1 0 Y(S) d) (7) Find the transfer function US) e) (5) Is the system BIBO stable? 3 f) (9) Let the initial state x(0) -3 u(t) = 0) for all t > 0. = Find the zero input response (i.e., with the input
Problem 4: (65 points) Let a system be given by the state space representation 8 8 10 * = X+ u(t), y = [1 -1]x – u(t) 1 1 -1 0 Y(S) d) (7) Find the transfer function US) e) (5) Is the system BIBO stable? 3 f) (9) Let the initial state x(0) -3 u(t) = 0) for all t > 0. = Find the zero input response (i.e., with the input
 b) The transfer function of a causal linear time-invariant (LTI) discrete-time system is given by: 1+0.6z1-0.5z1 i Does the system have a finite impulse response (FIR) or infinite 3 impulse response (IIR)? Explain why. ii Determine the impulse response h[n] of the above system iii) Suppose that the system above was designed using the bilinear transformation method with sampling period T-0.5 s. Determine its original analogue transfer function.
b) The transfer function of a causal linear time-invariant (LTI) discrete-time system...
b) The transfer function of a causal linear time-invariant (LTI) discrete-time system is given by: 1+0.6z1-0.5z1 i Does the system have a finite impulse response (FIR) or infinite 3 impulse response (IIR)? Explain why. ii Determine the impulse response h[n] of the above system iii) Suppose that the system above was designed using the bilinear transformation method with sampling period T-0.5 s. Determine its original analogue transfer function.
b) The transfer function of a causal linear time-invariant (LTI) discrete-time system...
 Consider a linear, time-invariant system with an input given by X(T) = A, sin(Wit) where w, is a specific frequency. The system has a frequency response given by the amplitude ratio (magnitude ratio) as a function of the frequency, Mw), and the phase difference as a function of frequency, °W). Write an expression for the corresponding output in terms of the input amplitude, A1, the input frequency, W1, the amplitude ratio, and the phase difference.
Consider a linear, time-invariant system with an input given by X(T) = A, sin(Wit) where w, is a specific frequency. The system has a frequency response given by the amplitude ratio (magnitude ratio) as a function of the frequency, Mw), and the phase difference as a function of frequency, °W). Write an expression for the corresponding output in terms of the input amplitude, A1, the input frequency, W1, the amplitude ratio, and the phase difference.
 10.Represent the translational mechanical system shown in the Figure in state- space, where xX3(t) is the output IN- 11.Find the state equations and output equation for the phase-variable representation of the transfer function G(s) 2s+1/(s2+7s+ 9) 12. Convert the state and output equations shown to a transfer function. -1.5 2 u(t) X = X 4 0 Y [1.5 0.625]x 13. For each system shown, write the state equations and the output equation for the phase- variable representation 8s10 sh25 t26...
10.Represent the translational mechanical system shown in the Figure in state- space, where xX3(t) is the output IN- 11.Find the state equations and output equation for the phase-variable representation of the transfer function G(s) 2s+1/(s2+7s+ 9) 12. Convert the state and output equations shown to a transfer function. -1.5 2 u(t) X = X 4 0 Y [1.5 0.625]x 13. For each system shown, write the state equations and the output equation for the phase- variable representation 8s10 sh25 t26...
Most questions answered within 3 hours.
-
The standard enthalpy of reaction (i.e. ΔH°) for a particular
reaction is −20.1 kJ/mol. At 16.0...
asked 6 minutes ago -
An object is placed 30 cm to the left of a converging lens of
focal length...
asked 6 minutes ago -
In a simple random sample of size 51, taken from a population,
24 of the individuals...
asked 7 minutes ago -
The following
sentences are choppy. Improve their coherence by supplying
transitions to make them effective sentences....
asked 20 minutes ago -
What is the frequency of the second hand of a clock, assuming it
is keeping correct...
asked 25 minutes ago -
Determine Heat of reaction (Hrxn) for: 2 C (s, graphite) + 3 H2
(g) ------> C2H6...
asked 44 minutes ago -
A 270 pF capacitor is charged to a potential difference of 120
V, and the charging...
asked 45 minutes ago -
1.8 zyLab training: Basics (Java)
While the zyLab platform can be used without training, a bit...
asked 48 minutes ago -
The figure below shows an electron passing between two charged
metal plates that create an 100...
asked 50 minutes ago -
A) Calculate the final temperature, in degrees Celsius,
if n and V do not change.
A...
asked 53 minutes ago -
Find the 60th percentile of a standard normal
distribution(3 decimal places) on StatCrunch
asked 1 hour ago -
This week we discuss the properly classified Balance Sheet.
Recall that the value of assets is...
asked 1 hour ago