
![12. Convert the state and output equations shown to a transfer function. -1.5 2 u(t) X = X 4 0 Y [1.5 0.625]x](http://img.homeworklib.com/images/fa52782d-5208-4966-9565-c0fe99f1a14d.png?x-oss-process=image/resize,w_560)

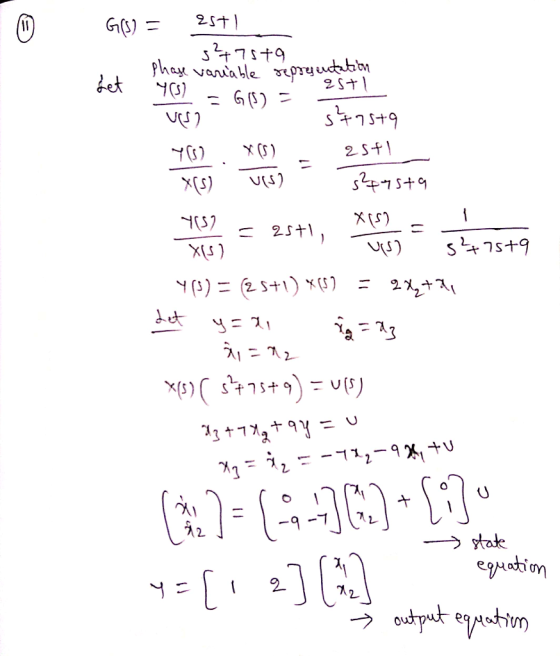
11.Find the state equations and output equation for the phase-variable representation of the transfer function G(s) 2s+1/(s2+7s+ 9)
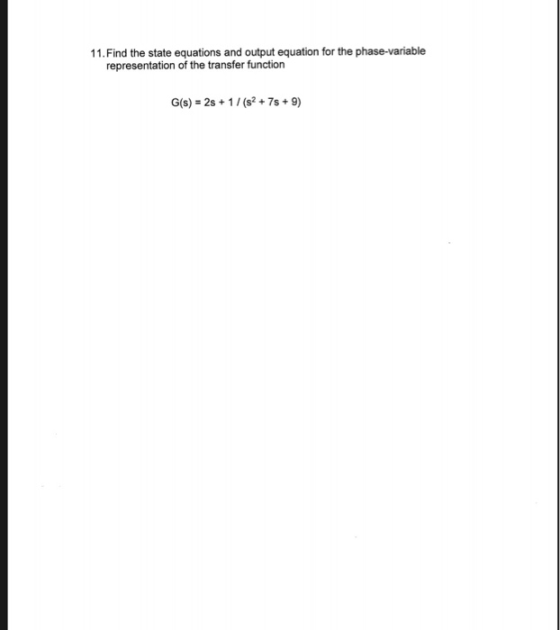
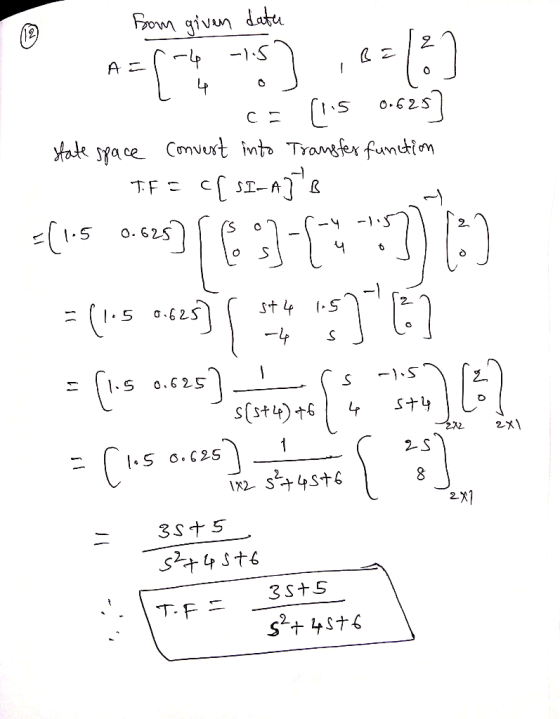
12. Convert the state and output equations shown to a transfer function. -1.5 2 u(t) X = X 4 0 Y [1.5 0.625]x
13. For each system shown, write the state equations and the output equation for the phase- variable representation 8s10 sh25 t26 59495t/35ES b Ple)
Homework Answers




Add Answer to:
10.Represent the translational mechanical system shown in the Figure in state- space, where xX3(t) is the...
Prelab 1. Perform Prelab 1 and Prel ab 2 of Experiment 3.1 if you have not already done so. 2. Us...
 Prelab 1. Perform Prelab 1 and Prel ab 2 of Experiment 3.1 if you have not already done so. 2. Using the equation T(s) C(I A) B to find a transfer function from a state-space repre sentation, write a MATLAB program usingthe Symbolic Math Toolbox to findthe symbolic transfer function from the state-space repre sentation of the translational mechanical system shown in Skill-Assessment Exercise 3.2 and found as a step in Prelab 1 3. Using the equations of motion of...
Prelab 1. Perform Prelab 1 and Prel ab 2 of Experiment 3.1 if you have not already done so. 2. Using the equation T(s) C(I A) B to find a transfer function from a state-space repre sentation, write a MATLAB program usingthe Symbolic Math Toolbox to findthe symbolic transfer function from the state-space repre sentation of the translational mechanical system shown in Skill-Assessment Exercise 3.2 and found as a step in Prelab 1 3. Using the equations of motion of...
For each form show both state space equation and signal flow graph. Can you also include the Matl...
 For each form show both state space equation and signal flow
graph.
Can you also include the Matlab code
Problem 2. The system is given by its phase variable form state space equations 0 1 0 x(t) = | |x(t) + r(t) 0 -48-44 -12 0 y(t) 7 30lx(t) a) Find the transfer function of the system, and represent the system in cascade, parallel, controller-canonical, and observer-canonical forms. For each form show both state space equations and signal-flow graph. Do...
For each form show both state space equation and signal flow
graph.
Can you also include the Matlab code
Problem 2. The system is given by its phase variable form state space equations 0 1 0 x(t) = | |x(t) + r(t) 0 -48-44 -12 0 y(t) 7 30lx(t) a) Find the transfer function of the system, and represent the system in cascade, parallel, controller-canonical, and observer-canonical forms. For each form show both state space equations and signal-flow graph. Do...
in the figure, obtain the state-space representation of the syster thè 1. Consider the mechanical system...
 in the figure, obtain the state-space representation of the syster thè 1. Consider the mechanical system shown ssume y() is the output. (25 marks) ce representation of systel. ki lu k2
in the figure, obtain the state-space representation of the syster thè 1. Consider the mechanical system shown ssume y() is the output. (25 marks) ce representation of systel. ki lu k2
3. a) Find a state space representation for a linear system represented by the following differen...
 3. a) Find a state space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(1) is the output: b) Consider a linear system represented by the following differential equation, where x() denotes the input and y(t) is the output: )+4()+4y()x(t) i) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input that has...
3. a) Find a state space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(1) is the output: b) Consider a linear system represented by the following differential equation, where x() denotes the input and y(t) is the output: )+4()+4y()x(t) i) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input that has...
2. For figure 2; a. Determine the dc parameters Vera1), VB(02), VE, Ica, VCEaQra1), VCEQ(a2). b....
 2. For figure 2; a. Determine the dc parameters Vera1), VB(02), VE, Ica, VCEaQra1), VCEQ(a2). b. For the 5 Vrms input, determine the power delivered to the load resistor. c. Draw the load line for the npn transistor. Label the saturation current, Ic(sat), and show the Q-point. +9 V 1.0 kn Di V RL 50 5.0V ms 1.0 kn Vc -9 V 10.Represent the translational mechanical system shown in the Figure in state- space, where xX3(t) is the output IN-...
2. For figure 2; a. Determine the dc parameters Vera1), VB(02), VE, Ica, VCEaQra1), VCEQ(a2). b. For the 5 Vrms input, determine the power delivered to the load resistor. c. Draw the load line for the npn transistor. Label the saturation current, Ic(sat), and show the Q-point. +9 V 1.0 kn Di V RL 50 5.0V ms 1.0 kn Vc -9 V 10.Represent the translational mechanical system shown in the Figure in state- space, where xX3(t) is the output IN-...
7. Consider the mechanical system shown below. The system initially at rest. The displacements u, y,...
 7. Consider the mechanical system shown below. The system initially at rest. The displacements u, y, and z are measured from their respective rest positions. Given that u is the input, y is the output, 1) Obtain the transfer function of the system (20pt). 2) Obtain a state-space representation of the system (20pt). I b, - obteranlara k, 12 WI
7. Consider the mechanical system shown below. The system initially at rest. The displacements u, y, and z are measured from their respective rest positions. Given that u is the input, y is the output, 1) Obtain the transfer function of the system (20pt). 2) Obtain a state-space representation of the system (20pt). I b, - obteranlara k, 12 WI
Given a linear time-invariant system in state-space representation: -100 5*+u(t) y=[1 0]x (i) Determine the transfer...
 Given a linear time-invariant system in state-space representation: -100 5*+u(t) y=[1 0]x (i) Determine the transfer function of the system. (ii) Build an equivalent mechanical system showing all the parameters. (ii) Derive an expression x(t) for this system for step input. Is the mechanical system over damped, under damped or critically damped system?
Given a linear time-invariant system in state-space representation: -100 5*+u(t) y=[1 0]x (i) Determine the transfer function of the system. (ii) Build an equivalent mechanical system showing all the parameters. (ii) Derive an expression x(t) for this system for step input. Is the mechanical system over damped, under damped or critically damped system?
Given a zero-state LTI system whose impulse response h(t) = u(t) u(t-2), if the input of...
 Given a zero-state LTI system whose impulse response h(t) = u(t) u(t-2), if the input of the system is r(t), find the system equation which relates the input to the output y(t) 4. (20 points) If a causal signal's s-domain representation is given as X (s) = (s+ 2)(s2 +2s + 5) (a) find all the poles and zero of the function. 2 1 52243 orr
Given a zero-state LTI system whose impulse response h(t) = u(t) u(t-2), if the input of the system is r(t), find the system equation which relates the input to the output y(t) 4. (20 points) If a causal signal's s-domain representation is given as X (s) = (s+ 2)(s2 +2s + 5) (a) find all the poles and zero of the function. 2 1 52243 orr
1- [25] Find the state-space representation of the system shown in the Figure. The output is...
 1- [25] Find the state-space representation of the system shown in the Figure. The output is Vo(t) R v;(t) C0000
1- [25] Find the state-space representation of the system shown in the Figure. The output is Vo(t) R v;(t) C0000
Fall 2017 Find the transfer function, G(s) X.(s)/F(s), for the translational mechanical network shown in Figure...
 Fall 2017 Find the transfer function, G(s) X.(s)/F(s), for the translational mechanical network shown in Figure P1 1. X, t) 2 N 2Ka IN-5Im
Fall 2017 Find the transfer function, G(s) X.(s)/F(s), for the translational mechanical network shown in Figure P1 1. X, t) 2 N 2Ka IN-5Im
 Prelab 1. Perform Prelab 1 and Prel ab 2 of Experiment 3.1 if you have not already done so. 2. Using the equation T(s) C(I A) B to find a transfer function from a state-space repre sentation, write a MATLAB program usingthe Symbolic Math Toolbox to findthe symbolic transfer function from the state-space repre sentation of the translational mechanical system shown in Skill-Assessment Exercise 3.2 and found as a step in Prelab 1 3. Using the equations of motion of...
Prelab 1. Perform Prelab 1 and Prel ab 2 of Experiment 3.1 if you have not already done so. 2. Using the equation T(s) C(I A) B to find a transfer function from a state-space repre sentation, write a MATLAB program usingthe Symbolic Math Toolbox to findthe symbolic transfer function from the state-space repre sentation of the translational mechanical system shown in Skill-Assessment Exercise 3.2 and found as a step in Prelab 1 3. Using the equations of motion of...
 For each form show both state space equation and signal flow
graph.
Can you also include the Matlab code
Problem 2. The system is given by its phase variable form state space equations 0 1 0 x(t) = | |x(t) + r(t) 0 -48-44 -12 0 y(t) 7 30lx(t) a) Find the transfer function of the system, and represent the system in cascade, parallel, controller-canonical, and observer-canonical forms. For each form show both state space equations and signal-flow graph. Do...
For each form show both state space equation and signal flow
graph.
Can you also include the Matlab code
Problem 2. The system is given by its phase variable form state space equations 0 1 0 x(t) = | |x(t) + r(t) 0 -48-44 -12 0 y(t) 7 30lx(t) a) Find the transfer function of the system, and represent the system in cascade, parallel, controller-canonical, and observer-canonical forms. For each form show both state space equations and signal-flow graph. Do...
 in the figure, obtain the state-space representation of the syster thè 1. Consider the mechanical system shown ssume y() is the output. (25 marks) ce representation of systel. ki lu k2
in the figure, obtain the state-space representation of the syster thè 1. Consider the mechanical system shown ssume y() is the output. (25 marks) ce representation of systel. ki lu k2
 3. a) Find a state space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(1) is the output: b) Consider a linear system represented by the following differential equation, where x() denotes the input and y(t) is the output: )+4()+4y()x(t) i) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input that has...
3. a) Find a state space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(1) is the output: b) Consider a linear system represented by the following differential equation, where x() denotes the input and y(t) is the output: )+4()+4y()x(t) i) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input that has...
 2. For figure 2; a. Determine the dc parameters Vera1), VB(02), VE, Ica, VCEaQra1), VCEQ(a2). b. For the 5 Vrms input, determine the power delivered to the load resistor. c. Draw the load line for the npn transistor. Label the saturation current, Ic(sat), and show the Q-point. +9 V 1.0 kn Di V RL 50 5.0V ms 1.0 kn Vc -9 V 10.Represent the translational mechanical system shown in the Figure in state- space, where xX3(t) is the output IN-...
2. For figure 2; a. Determine the dc parameters Vera1), VB(02), VE, Ica, VCEaQra1), VCEQ(a2). b. For the 5 Vrms input, determine the power delivered to the load resistor. c. Draw the load line for the npn transistor. Label the saturation current, Ic(sat), and show the Q-point. +9 V 1.0 kn Di V RL 50 5.0V ms 1.0 kn Vc -9 V 10.Represent the translational mechanical system shown in the Figure in state- space, where xX3(t) is the output IN-...
 7. Consider the mechanical system shown below. The system initially at rest. The displacements u, y, and z are measured from their respective rest positions. Given that u is the input, y is the output, 1) Obtain the transfer function of the system (20pt). 2) Obtain a state-space representation of the system (20pt). I b, - obteranlara k, 12 WI
7. Consider the mechanical system shown below. The system initially at rest. The displacements u, y, and z are measured from their respective rest positions. Given that u is the input, y is the output, 1) Obtain the transfer function of the system (20pt). 2) Obtain a state-space representation of the system (20pt). I b, - obteranlara k, 12 WI
 Given a linear time-invariant system in state-space representation: -100 5*+u(t) y=[1 0]x (i) Determine the transfer function of the system. (ii) Build an equivalent mechanical system showing all the parameters. (ii) Derive an expression x(t) for this system for step input. Is the mechanical system over damped, under damped or critically damped system?
Given a linear time-invariant system in state-space representation: -100 5*+u(t) y=[1 0]x (i) Determine the transfer function of the system. (ii) Build an equivalent mechanical system showing all the parameters. (ii) Derive an expression x(t) for this system for step input. Is the mechanical system over damped, under damped or critically damped system?
 Given a zero-state LTI system whose impulse response h(t) = u(t) u(t-2), if the input of the system is r(t), find the system equation which relates the input to the output y(t) 4. (20 points) If a causal signal's s-domain representation is given as X (s) = (s+ 2)(s2 +2s + 5) (a) find all the poles and zero of the function. 2 1 52243 orr
Given a zero-state LTI system whose impulse response h(t) = u(t) u(t-2), if the input of the system is r(t), find the system equation which relates the input to the output y(t) 4. (20 points) If a causal signal's s-domain representation is given as X (s) = (s+ 2)(s2 +2s + 5) (a) find all the poles and zero of the function. 2 1 52243 orr
 1- [25] Find the state-space representation of the system shown in the Figure. The output is Vo(t) R v;(t) C0000
1- [25] Find the state-space representation of the system shown in the Figure. The output is Vo(t) R v;(t) C0000
 Fall 2017 Find the transfer function, G(s) X.(s)/F(s), for the translational mechanical network shown in Figure P1 1. X, t) 2 N 2Ka IN-5Im
Fall 2017 Find the transfer function, G(s) X.(s)/F(s), for the translational mechanical network shown in Figure P1 1. X, t) 2 N 2Ka IN-5Im
Most questions answered within 3 hours.
-
The free energy change for the following reaction at 25 °C, when
[Sn2+] = 1.17 M...
asked 1 hour ago -
An MNE is this kind of industry when competition in one country
is essentially independent of...
asked 2 hours ago -
. For this set of questions, determine what
proportion of a normal distribution is located betweeneach...
asked 3 hours ago -
A college student is employed as a door-to-door newspaper
salesman. Historical data suggests that the student...
asked 4 hours ago -
MATLAB HW 11 problem using Switch Case and Input commands
Write a script file that calculates...
asked 3 hours ago -
Considering gravitational time dilation, calculate the time that
passes in Earth’s surface while 1 hour passes...
asked 4 hours ago -
Minitab Problem: Take the Lake Hume June rainfall data and find
use the processes outlined in...
asked 5 hours ago -
X Company is trying to decide whether to continue using old
equipment to make Product A...
asked 5 hours ago -
IN PYTHON ONLY !! Program 2: Re-work
program #5 (WeeklyHours) from the previous assignment such that...
asked 5 hours ago -
The average length of time between arrivals at a turnpike
toll-booth is 26 seconds. What is...
asked 7 hours ago -
(a) A piston at 6.1 atm contains a gas that occupies a volume of
3.5 L....
asked 8 hours ago -
Please answer true or false. Words
cannot be changed or added in to make it true...
asked 8 hours ago