
Homework Answers



Add Answer to:
3. a) Find a state space representation for a linear system represented by the following differen...
3. a) Find a sate space representation for a linear system represented by the following different...
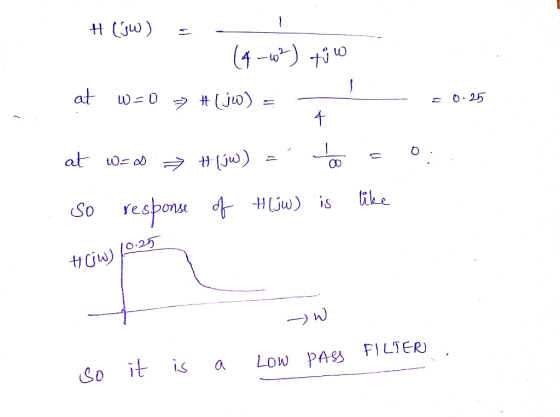
 3. a) Find a sate space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(0) is the output: 4y(t)- 2(t)-2y(t)3(t) b) Consider a linear system represented by the following differential equation, where st) denotes the input and yt) is the output: )+4() +4y(t)x(t) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input...
3. a) Find a sate space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(0) is the output: 4y(t)- 2(t)-2y(t)3(t) b) Consider a linear system represented by the following differential equation, where st) denotes the input and yt) is the output: )+4() +4y(t)x(t) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input...
3. (25 points) For parts a & b, determine the state space representation and write the matlab cod...
 3. (25 points) For parts a & b, determine the state space representation and write the matlab code to solve the transfer function a. The circuit below where the input is v, and the output is Va 500 mF V, LX 0 b. A system is represented by the differential equation below where the output is y() and the input is z(). 440180 + 5y0) 2) d' y(t) dr d y(t) dt ontpm ria bles 2L
3. (25 points) For...
3. (25 points) For parts a & b, determine the state space representation and write the matlab code to solve the transfer function a. The circuit below where the input is v, and the output is Va 500 mF V, LX 0 b. A system is represented by the differential equation below where the output is y() and the input is z(). 440180 + 5y0) 2) d' y(t) dr d y(t) dt ontpm ria bles 2L
3. (25 points) For...
3. Consider a linear time invariant system described by the differential equation dy(t) dt RCww +...
 3. Consider a linear time invariant system described by the differential equation dy(t) dt RCww + y(t)-x(t) where yt) is the system's output, x(t) ?s the system's input, and R and C are both positive real constants. a) Determine both the magnitude and phase of the system's frequency response. b) Determine the frequency spectrum of c) Determine the spectrum of the system's output, y(r), when d) Determine the system's steady state output response x()-1+cos(t) xu)+cost)
3. Consider a linear time invariant system described by the differential equation dy(t) dt RCww + y(t)-x(t) where yt) is the system's output, x(t) ?s the system's input, and R and C are both positive real constants. a) Determine both the magnitude and phase of the system's frequency response. b) Determine the frequency spectrum of c) Determine the spectrum of the system's output, y(r), when d) Determine the system's steady state output response x()-1+cos(t) xu)+cost)
53.) Determine the transfer function of the system represented by the following space state representation. 3=...
 53.) Determine the transfer function of the system represented by the following space state representation. 3= 13* = 11 (33+ [1] y = [1 01Q;}
53.) Determine the transfer function of the system represented by the following space state representation. 3= 13* = 11 (33+ [1] y = [1 01Q;}
3. Consider the Linear Time-Invariant (LTI) system decribed by the following differential equation: dy +504 +...
 3. Consider the Linear Time-Invariant (LTI) system decribed by the following differential equation: dy +504 + 4y = u(t) dt dt where y(t) is the output of the system and u(t) is the input. This is an Initial Value Problem (IVP) with initial conditions y(0) = 0, y = 0. Also by setting u(t) = (t) an input 8(t) is given to the system, where 8(t) is the unit impulse function. a. Write a function F(s) for a function f(t)...
3. Consider the Linear Time-Invariant (LTI) system decribed by the following differential equation: dy +504 + 4y = u(t) dt dt where y(t) is the output of the system and u(t) is the input. This is an Initial Value Problem (IVP) with initial conditions y(0) = 0, y = 0. Also by setting u(t) = (t) an input 8(t) is given to the system, where 8(t) is the unit impulse function. a. Write a function F(s) for a function f(t)...
UestionI. A system is represented by the following transfer function G(s)- (s+1)/(s2+5s+6) 1) Fin...
 uestionI. A system is represented by the following transfer function G(s)- (s+1)/(s2+5s+6) 1) Find a state equation and state transition matrices (A,B, C and D) of the system for a step input 6u(t). ii) Find the state transition matrix eAt) ii) Find the output response of system y(t) to a step input 6u(t) using state transition matrix, iv) Obtain the output response y(t) of the system with two other methods for step input óu(t). Question IV. A system is described...
uestionI. A system is represented by the following transfer function G(s)- (s+1)/(s2+5s+6) 1) Find a state equation and state transition matrices (A,B, C and D) of the system for a step input 6u(t). ii) Find the state transition matrix eAt) ii) Find the output response of system y(t) to a step input 6u(t) using state transition matrix, iv) Obtain the output response y(t) of the system with two other methods for step input óu(t). Question IV. A system is described...
Consider a causal, linear and time-invariant system of continuous time, with an input-output relation that obeys...
 Consider a causal, linear and time-invariant system of continuous time, with an input-output relation that obeys the following linear differential equation: y(t) + 2y(t) = x(t), where x(t) and y(t) stand for the input and output signals of the system, respectively, and the dot symbol over a signal denotes its first-order derivative with respect to time t. Use the Laplace transform to compute the output y(t) of the system, given the initial condition y(0-) = V2 and the input signal...
Consider a causal, linear and time-invariant system of continuous time, with an input-output relation that obeys the following linear differential equation: y(t) + 2y(t) = x(t), where x(t) and y(t) stand for the input and output signals of the system, respectively, and the dot symbol over a signal denotes its first-order derivative with respect to time t. Use the Laplace transform to compute the output y(t) of the system, given the initial condition y(0-) = V2 and the input signal...
Question 2 A linear time-invariant (LTI) system has its response described by the following second-order differential...
 Question 2 A linear time-invariant (LTI) system has its response described by the following second-order differential equation: d'y) 3-10))-3*0)-6x0) dy_hi dx(t) where x() is the input function and y(t) is the output function. (a) Determine the transfer function H(a) of the system. (b) Determine the impulse response h(t) of the system.
Question 2 A linear time-invariant (LTI) system has its response described by the following second-order differential equation: d'y) 3-10))-3*0)-6x0) dy_hi dx(t) where x() is the input function and y(t) is the output function. (a) Determine the transfer function H(a) of the system. (b) Determine the impulse response h(t) of the system.
Consider the linear system given by the following differential equation y(4) + 3y(3) + 2y +...
 Consider the linear system given by the following differential equation y(4) + 3y(3) + 2y + 3y + 2y = ů – u where u = r(t) is the input and y is the output. Do not use MATLAB! a) Find the transfer function of the system (assume zero initial conditions)? b) Is this system stable? Show your work to justify your claim. Note: y(4) is the fourth derivative of y. Hint: Use the Routh-Hurwitz stability criterion! c) Write the...
Consider the linear system given by the following differential equation y(4) + 3y(3) + 2y + 3y + 2y = ů – u where u = r(t) is the input and y is the output. Do not use MATLAB! a) Find the transfer function of the system (assume zero initial conditions)? b) Is this system stable? Show your work to justify your claim. Note: y(4) is the fourth derivative of y. Hint: Use the Routh-Hurwitz stability criterion! c) Write the...
10.Represent the translational mechanical system shown in the Figure in state- space, where xX3(t) is the...
 10.Represent the translational mechanical system shown in the Figure in state- space, where xX3(t) is the output IN- 11.Find the state equations and output equation for the phase-variable representation of the transfer function G(s) 2s+1/(s2+7s+ 9) 12. Convert the state and output equations shown to a transfer function. -1.5 2 u(t) X = X 4 0 Y [1.5 0.625]x 13. For each system shown, write the state equations and the output equation for the phase- variable representation 8s10 sh25 t26...
10.Represent the translational mechanical system shown in the Figure in state- space, where xX3(t) is the output IN- 11.Find the state equations and output equation for the phase-variable representation of the transfer function G(s) 2s+1/(s2+7s+ 9) 12. Convert the state and output equations shown to a transfer function. -1.5 2 u(t) X = X 4 0 Y [1.5 0.625]x 13. For each system shown, write the state equations and the output equation for the phase- variable representation 8s10 sh25 t26...
 3. a) Find a sate space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(0) is the output: 4y(t)- 2(t)-2y(t)3(t) b) Consider a linear system represented by the following differential equation, where st) denotes the input and yt) is the output: )+4() +4y(t)x(t) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input...
3. a) Find a sate space representation for a linear system represented by the following differential equation, where v(t) denotes the input and y(0) is the output: 4y(t)- 2(t)-2y(t)3(t) b) Consider a linear system represented by the following differential equation, where st) denotes the input and yt) is the output: )+4() +4y(t)x(t) Write down its transfer function and frequency response function i) What is the form of the steady state response of the above system due to a periodic input...
 3. (25 points) For parts a & b, determine the state space representation and write the matlab code to solve the transfer function a. The circuit below where the input is v, and the output is Va 500 mF V, LX 0 b. A system is represented by the differential equation below where the output is y() and the input is z(). 440180 + 5y0) 2) d' y(t) dr d y(t) dt ontpm ria bles 2L
3. (25 points) For...
3. (25 points) For parts a & b, determine the state space representation and write the matlab code to solve the transfer function a. The circuit below where the input is v, and the output is Va 500 mF V, LX 0 b. A system is represented by the differential equation below where the output is y() and the input is z(). 440180 + 5y0) 2) d' y(t) dr d y(t) dt ontpm ria bles 2L
3. (25 points) For...
 3. Consider a linear time invariant system described by the differential equation dy(t) dt RCww + y(t)-x(t) where yt) is the system's output, x(t) ?s the system's input, and R and C are both positive real constants. a) Determine both the magnitude and phase of the system's frequency response. b) Determine the frequency spectrum of c) Determine the spectrum of the system's output, y(r), when d) Determine the system's steady state output response x()-1+cos(t) xu)+cost)
3. Consider a linear time invariant system described by the differential equation dy(t) dt RCww + y(t)-x(t) where yt) is the system's output, x(t) ?s the system's input, and R and C are both positive real constants. a) Determine both the magnitude and phase of the system's frequency response. b) Determine the frequency spectrum of c) Determine the spectrum of the system's output, y(r), when d) Determine the system's steady state output response x()-1+cos(t) xu)+cost)
 53.) Determine the transfer function of the system represented by the following space state representation. 3= 13* = 11 (33+ [1] y = [1 01Q;}
53.) Determine the transfer function of the system represented by the following space state representation. 3= 13* = 11 (33+ [1] y = [1 01Q;}
 3. Consider the Linear Time-Invariant (LTI) system decribed by the following differential equation: dy +504 + 4y = u(t) dt dt where y(t) is the output of the system and u(t) is the input. This is an Initial Value Problem (IVP) with initial conditions y(0) = 0, y = 0. Also by setting u(t) = (t) an input 8(t) is given to the system, where 8(t) is the unit impulse function. a. Write a function F(s) for a function f(t)...
3. Consider the Linear Time-Invariant (LTI) system decribed by the following differential equation: dy +504 + 4y = u(t) dt dt where y(t) is the output of the system and u(t) is the input. This is an Initial Value Problem (IVP) with initial conditions y(0) = 0, y = 0. Also by setting u(t) = (t) an input 8(t) is given to the system, where 8(t) is the unit impulse function. a. Write a function F(s) for a function f(t)...
 uestionI. A system is represented by the following transfer function G(s)- (s+1)/(s2+5s+6) 1) Find a state equation and state transition matrices (A,B, C and D) of the system for a step input 6u(t). ii) Find the state transition matrix eAt) ii) Find the output response of system y(t) to a step input 6u(t) using state transition matrix, iv) Obtain the output response y(t) of the system with two other methods for step input óu(t). Question IV. A system is described...
uestionI. A system is represented by the following transfer function G(s)- (s+1)/(s2+5s+6) 1) Find a state equation and state transition matrices (A,B, C and D) of the system for a step input 6u(t). ii) Find the state transition matrix eAt) ii) Find the output response of system y(t) to a step input 6u(t) using state transition matrix, iv) Obtain the output response y(t) of the system with two other methods for step input óu(t). Question IV. A system is described...
 Consider a causal, linear and time-invariant system of continuous time, with an input-output relation that obeys the following linear differential equation: y(t) + 2y(t) = x(t), where x(t) and y(t) stand for the input and output signals of the system, respectively, and the dot symbol over a signal denotes its first-order derivative with respect to time t. Use the Laplace transform to compute the output y(t) of the system, given the initial condition y(0-) = V2 and the input signal...
Consider a causal, linear and time-invariant system of continuous time, with an input-output relation that obeys the following linear differential equation: y(t) + 2y(t) = x(t), where x(t) and y(t) stand for the input and output signals of the system, respectively, and the dot symbol over a signal denotes its first-order derivative with respect to time t. Use the Laplace transform to compute the output y(t) of the system, given the initial condition y(0-) = V2 and the input signal...
 Question 2 A linear time-invariant (LTI) system has its response described by the following second-order differential equation: d'y) 3-10))-3*0)-6x0) dy_hi dx(t) where x() is the input function and y(t) is the output function. (a) Determine the transfer function H(a) of the system. (b) Determine the impulse response h(t) of the system.
Question 2 A linear time-invariant (LTI) system has its response described by the following second-order differential equation: d'y) 3-10))-3*0)-6x0) dy_hi dx(t) where x() is the input function and y(t) is the output function. (a) Determine the transfer function H(a) of the system. (b) Determine the impulse response h(t) of the system.
 Consider the linear system given by the following differential equation y(4) + 3y(3) + 2y + 3y + 2y = ů – u where u = r(t) is the input and y is the output. Do not use MATLAB! a) Find the transfer function of the system (assume zero initial conditions)? b) Is this system stable? Show your work to justify your claim. Note: y(4) is the fourth derivative of y. Hint: Use the Routh-Hurwitz stability criterion! c) Write the...
Consider the linear system given by the following differential equation y(4) + 3y(3) + 2y + 3y + 2y = ů – u where u = r(t) is the input and y is the output. Do not use MATLAB! a) Find the transfer function of the system (assume zero initial conditions)? b) Is this system stable? Show your work to justify your claim. Note: y(4) is the fourth derivative of y. Hint: Use the Routh-Hurwitz stability criterion! c) Write the...
 10.Represent the translational mechanical system shown in the Figure in state- space, where xX3(t) is the output IN- 11.Find the state equations and output equation for the phase-variable representation of the transfer function G(s) 2s+1/(s2+7s+ 9) 12. Convert the state and output equations shown to a transfer function. -1.5 2 u(t) X = X 4 0 Y [1.5 0.625]x 13. For each system shown, write the state equations and the output equation for the phase- variable representation 8s10 sh25 t26...
10.Represent the translational mechanical system shown in the Figure in state- space, where xX3(t) is the output IN- 11.Find the state equations and output equation for the phase-variable representation of the transfer function G(s) 2s+1/(s2+7s+ 9) 12. Convert the state and output equations shown to a transfer function. -1.5 2 u(t) X = X 4 0 Y [1.5 0.625]x 13. For each system shown, write the state equations and the output equation for the phase- variable representation 8s10 sh25 t26...
Most questions answered within 3 hours.
-
For a class science experiment, the students had to grow beans
in a cup and see...
asked 7 seconds from now -
CASE STUDY
The phrase ‘OK Boomer’ has gone viral recently as a way to
shut down...
asked 13 minutes ago -
The following thermochemical equation is for the reaction of
nitrogen(g) with oxygen(g) to form nitrogen dioxide(g)....
asked 9 minutes ago -
the solubility of an unknown salt M3Z2 at 25 degrees is
4.9*10^-7 mol/L. what is the...
asked 9 minutes ago -
We would like to create an Assembly program whose executable is
called division.exe and that behaves...
asked 11 minutes ago -
Consider a simple paging system with the following parameters:
232 bytes of physical memory; page size...
asked 11 minutes ago -
a raindrop of mass 2.00 g falls on the roof of a car with an
initial...
asked 34 minutes ago -
An environmental economic consulting firm is hired to measure
the negative externalities associated with the pollution...
asked 34 minutes ago -
Express Catering contributed $8,000 to the American Lung
Association. If taxable income, before charitable contribution is...
asked 26 minutes ago -
Why we should not allow the Oil & Gas industry to
explore, exploit and extract oil...
asked 37 minutes ago -
In the readings for this topic, the methods for gathering data are
provided. However, there is...
asked 49 minutes ago -
Select from the option list provided the most likely
classification(s) of net assets, if any, that...
asked 49 minutes ago