
Homework Answers



Add Answer to:
Q4 For the following Proportional controller use the step response and root locus rules obtain the...
% We can couple the design of gain on the root locus with a % step-response...
 % We can couple the design of gain on the root locus with a
% step-response simulation for the gain selected. We introduce
the command
% rlocus(G,K), which allows us to specify the range of gain, K,
for plotting the root
% locus. This command will help us smooth the usual root locus
plot by equivalently
% specifying more points via the argument, K. Notice that the
first root locus
% plotted without the argument K is not smooth. We...
% We can couple the design of gain on the root locus with a
% step-response simulation for the gain selected. We introduce
the command
% rlocus(G,K), which allows us to specify the range of gain, K,
for plotting the root
% locus. This command will help us smooth the usual root locus
plot by equivalently
% specifying more points via the argument, K. Notice that the
first root locus
% plotted without the argument K is not smooth. We...
Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifica...
 Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifications require a closed-loop pole at (-3+j1). Design a lead compensator to make sure the root locus goes through this point. For the design, pick the pole of the compensator at-23 and analytically find its zero. (Hint: Lead compensator transfer function will be Ge (s)$+23 First plot the poles and zeros...
Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifications require a closed-loop pole at (-3+j1). Design a lead compensator to make sure the root locus goes through this point. For the design, pick the pole of the compensator at-23 and analytically find its zero. (Hint: Lead compensator transfer function will be Ge (s)$+23 First plot the poles and zeros...
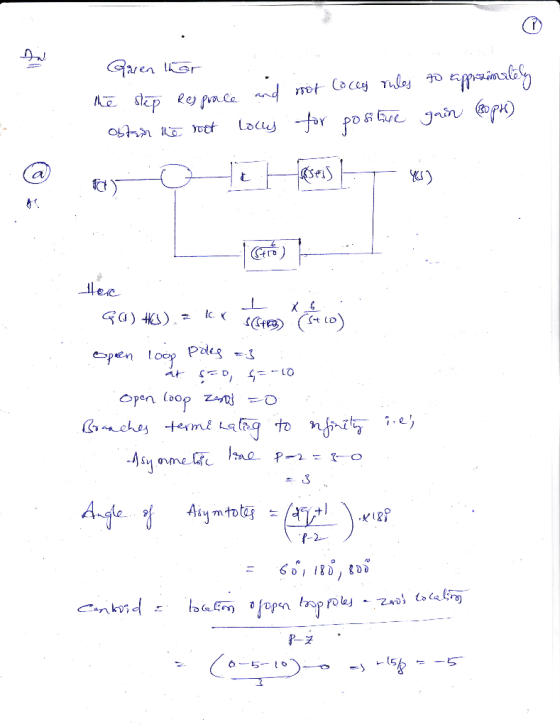
Question 4 (a) A feedback control system with a proportional controller is shown in Figure Q4...
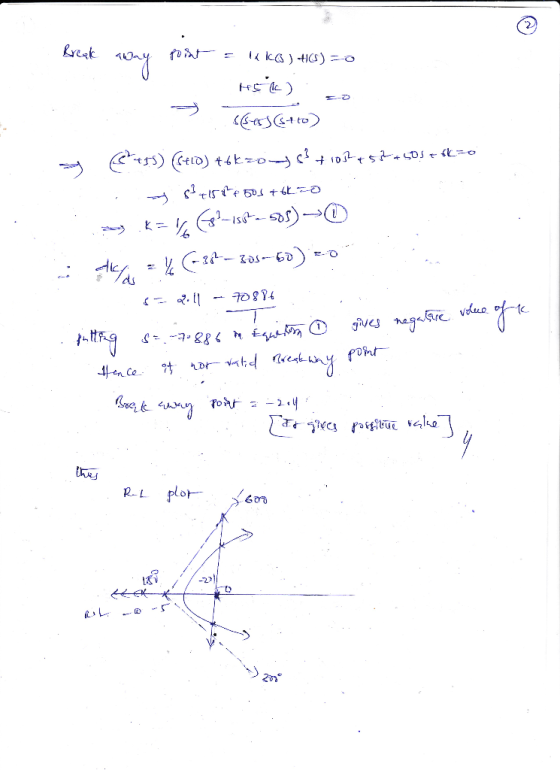
 Question 4 (a) A feedback control system with a proportional controller is shown in Figure Q4 (a). (i) Sketch the root locus of the system, (ii) Design the proportional controller (choose the value of K) such that the damping ratio does not exceed 0.5 and the time constant is less than 1 second. [All necessary steps of root locus construction and controller design must be shown). C(s) R(S) + s(s+4)(s + 10) Figure Q4 (a). A feedback control system [11...
Question 4 (a) A feedback control system with a proportional controller is shown in Figure Q4 (a). (i) Sketch the root locus of the system, (ii) Design the proportional controller (choose the value of K) such that the damping ratio does not exceed 0.5 and the time constant is less than 1 second. [All necessary steps of root locus construction and controller design must be shown). C(s) R(S) + s(s+4)(s + 10) Figure Q4 (a). A feedback control system [11...
root locus
 4. Consider the system described by the following block diagram. In this block diagram \(G(s)=\frac{1}{s+1}, C(z)=\frac{K}{1-z^{-}}\) are the system model and the digital controller.
(a) Sketch the root locus diagram of the system, \(C(z) G(z)\).
(b) Determine the range of gain \(K\) for the stability using the root locus.
(c) Determine the value of gain \(\mathrm{K}\) to get around \(10 \%\) maximum overshoot when a step input is applied using the root locus. Verify your results with plotting the closed...
4. Consider the system described by the following block diagram. In this block diagram \(G(s)=\frac{1}{s+1}, C(z)=\frac{K}{1-z^{-}}\) are the system model and the digital controller.
(a) Sketch the root locus diagram of the system, \(C(z) G(z)\).
(b) Determine the range of gain \(K\) for the stability using the root locus.
(c) Determine the value of gain \(\mathrm{K}\) to get around \(10 \%\) maximum overshoot when a step input is applied using the root locus. Verify your results with plotting the closed...
Prob. 3-25 points For this problem, use the root locus features to solve all parts: comp For: comp = a proportional controller = a positive gain Kp and z (z-1)/(z2 + 16) sys a) Draw a rough sket...
 Prob. 3-25 points For this problem, use the root locus features to solve all parts: comp For: comp = a proportional controller = a positive gain Kp and z (z-1)/(z2 + 16) sys a) Draw a rough sketch of the root-locus of the above system showing only the values of Kp at zeros and poles. b) 10 points: Find the range of Kp that makes the performance of the overall system underdamped. c) 10 points: Find the range of Kp...
Prob. 3-25 points For this problem, use the root locus features to solve all parts: comp For: comp = a proportional controller = a positive gain Kp and z (z-1)/(z2 + 16) sys a) Draw a rough sketch of the root-locus of the above system showing only the values of Kp at zeros and poles. b) 10 points: Find the range of Kp that makes the performance of the overall system underdamped. c) 10 points: Find the range of Kp...
Consider proportional feedback control as shown below. r(t) For each G(s) in the following problems A....
 Consider proportional feedback control as shown below. r(t) For each G(s) in the following problems A. Sketch the root locus. Clearly show the open-loop poles and zeros, and the high-gain asymptotes on your sketch. Calculate the centroid to assure that the high gain asymptotes are accurate. B. If your sketch reveals any break-in or break-away points, calculate those location C. Does your sketch reveal a jo- crossing? If so, stability may be an issue. D. A damping ratio of 7-...
Consider proportional feedback control as shown below. r(t) For each G(s) in the following problems A. Sketch the root locus. Clearly show the open-loop poles and zeros, and the high-gain asymptotes on your sketch. Calculate the centroid to assure that the high gain asymptotes are accurate. B. If your sketch reveals any break-in or break-away points, calculate those location C. Does your sketch reveal a jo- crossing? If so, stability may be an issue. D. A damping ratio of 7-...
A system having an open loop transfer function of G(S) = K10/(S+2)(3+1) has a root locus...
 A system having an open loop transfer function of G(S) = K10/(S+2)(3+1) has a root locus plot as shown below. The location of the roots for a system gain of K= 0.248 is show on the plot. At this location the system has a damping factor of 0.708 and a settling time of 4/1.5 = 2.67 seconds. A lead compensator is to be used to improve the transient response. (Note that nothing is plotted on the graph except for that...
A system having an open loop transfer function of G(S) = K10/(S+2)(3+1) has a root locus plot as shown below. The location of the roots for a system gain of K= 0.248 is show on the plot. At this location the system has a damping factor of 0.708 and a settling time of 4/1.5 = 2.67 seconds. A lead compensator is to be used to improve the transient response. (Note that nothing is plotted on the graph except for that...
Question 1 (60 points) Consider the following block diagram where G (s) Froarss RMs) GIs) Gls) (a) Sketch the root locus assuming a proportional controller is used. (b) Assume design spocifications r...
 Question 1 (60 points) Consider the following block diagram where G (s) Froarss RMs) GIs) Gls) (a) Sketch the root locus assuming a proportional controller is used. (b) Assume design spocifications require a closed-loop pole at (-3+ j1). Design a lead compensator sure the root locus goes through this point. For the design, pick the pole of the compensator at -23 and analytically find its zero location. (c) Sketch the root locus with the lead compensator in place.
Question 1...
Question 1 (60 points) Consider the following block diagram where G (s) Froarss RMs) GIs) Gls) (a) Sketch the root locus assuming a proportional controller is used. (b) Assume design spocifications require a closed-loop pole at (-3+ j1). Design a lead compensator sure the root locus goes through this point. For the design, pick the pole of the compensator at -23 and analytically find its zero location. (c) Sketch the root locus with the lead compensator in place.
Question 1...
Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus us...
 Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus using the below procedures. (1) find poles and zeros and locate on complex domain (2) find number of branches (3) find asymptotes including centroid and angles of asymptotes (4) intersection at imaginary axis (5) find the angle of departure (6) draw the root migration (b) Find the range of K for which the feedback system is asymptotically stable.
Problem 3:...
Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus using the below procedures. (1) find poles and zeros and locate on complex domain (2) find number of branches (3) find asymptotes including centroid and angles of asymptotes (4) intersection at imaginary axis (5) find the angle of departure (6) draw the root migration (b) Find the range of K for which the feedback system is asymptotically stable.
Problem 3:...
1 GH(s) (s24s3s2 + 10s 24) sketch the root locus and find the following: [Section: 8.5...
 1 GH(s) (s24s3s2 + 10s 24) sketch the root locus and find the following: [Section: 8.5 a. The breakaway and break-in points b. The jo-axis crossing c. The range of gain to keep the system stable d. The value of K to yield a stable system with second-order complex poles, with a damping ratio of 0.5
1 GH(s) (s24s3s2 + 10s 24) sketch the root locus and find the following: [Section: 8.5 a. The breakaway and break-in points b. The...
1 GH(s) (s24s3s2 + 10s 24) sketch the root locus and find the following: [Section: 8.5 a. The breakaway and break-in points b. The jo-axis crossing c. The range of gain to keep the system stable d. The value of K to yield a stable system with second-order complex poles, with a damping ratio of 0.5
1 GH(s) (s24s3s2 + 10s 24) sketch the root locus and find the following: [Section: 8.5 a. The breakaway and break-in points b. The...
 % We can couple the design of gain on the root locus with a
% step-response simulation for the gain selected. We introduce
the command
% rlocus(G,K), which allows us to specify the range of gain, K,
for plotting the root
% locus. This command will help us smooth the usual root locus
plot by equivalently
% specifying more points via the argument, K. Notice that the
first root locus
% plotted without the argument K is not smooth. We...
% We can couple the design of gain on the root locus with a
% step-response simulation for the gain selected. We introduce
the command
% rlocus(G,K), which allows us to specify the range of gain, K,
for plotting the root
% locus. This command will help us smooth the usual root locus
plot by equivalently
% specifying more points via the argument, K. Notice that the
first root locus
% plotted without the argument K is not smooth. We...
 Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifications require a closed-loop pole at (-3+j1). Design a lead compensator to make sure the root locus goes through this point. For the design, pick the pole of the compensator at-23 and analytically find its zero. (Hint: Lead compensator transfer function will be Ge (s)$+23 First plot the poles and zeros...
Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifications require a closed-loop pole at (-3+j1). Design a lead compensator to make sure the root locus goes through this point. For the design, pick the pole of the compensator at-23 and analytically find its zero. (Hint: Lead compensator transfer function will be Ge (s)$+23 First plot the poles and zeros...
 Question 4 (a) A feedback control system with a proportional controller is shown in Figure Q4 (a). (i) Sketch the root locus of the system, (ii) Design the proportional controller (choose the value of K) such that the damping ratio does not exceed 0.5 and the time constant is less than 1 second. [All necessary steps of root locus construction and controller design must be shown). C(s) R(S) + s(s+4)(s + 10) Figure Q4 (a). A feedback control system [11...
Question 4 (a) A feedback control system with a proportional controller is shown in Figure Q4 (a). (i) Sketch the root locus of the system, (ii) Design the proportional controller (choose the value of K) such that the damping ratio does not exceed 0.5 and the time constant is less than 1 second. [All necessary steps of root locus construction and controller design must be shown). C(s) R(S) + s(s+4)(s + 10) Figure Q4 (a). A feedback control system [11...
 Prob. 3-25 points For this problem, use the root locus features to solve all parts: comp For: comp = a proportional controller = a positive gain Kp and z (z-1)/(z2 + 16) sys a) Draw a rough sketch of the root-locus of the above system showing only the values of Kp at zeros and poles. b) 10 points: Find the range of Kp that makes the performance of the overall system underdamped. c) 10 points: Find the range of Kp...
Prob. 3-25 points For this problem, use the root locus features to solve all parts: comp For: comp = a proportional controller = a positive gain Kp and z (z-1)/(z2 + 16) sys a) Draw a rough sketch of the root-locus of the above system showing only the values of Kp at zeros and poles. b) 10 points: Find the range of Kp that makes the performance of the overall system underdamped. c) 10 points: Find the range of Kp...
 Consider proportional feedback control as shown below. r(t) For each G(s) in the following problems A. Sketch the root locus. Clearly show the open-loop poles and zeros, and the high-gain asymptotes on your sketch. Calculate the centroid to assure that the high gain asymptotes are accurate. B. If your sketch reveals any break-in or break-away points, calculate those location C. Does your sketch reveal a jo- crossing? If so, stability may be an issue. D. A damping ratio of 7-...
Consider proportional feedback control as shown below. r(t) For each G(s) in the following problems A. Sketch the root locus. Clearly show the open-loop poles and zeros, and the high-gain asymptotes on your sketch. Calculate the centroid to assure that the high gain asymptotes are accurate. B. If your sketch reveals any break-in or break-away points, calculate those location C. Does your sketch reveal a jo- crossing? If so, stability may be an issue. D. A damping ratio of 7-...
 A system having an open loop transfer function of G(S) = K10/(S+2)(3+1) has a root locus plot as shown below. The location of the roots for a system gain of K= 0.248 is show on the plot. At this location the system has a damping factor of 0.708 and a settling time of 4/1.5 = 2.67 seconds. A lead compensator is to be used to improve the transient response. (Note that nothing is plotted on the graph except for that...
A system having an open loop transfer function of G(S) = K10/(S+2)(3+1) has a root locus plot as shown below. The location of the roots for a system gain of K= 0.248 is show on the plot. At this location the system has a damping factor of 0.708 and a settling time of 4/1.5 = 2.67 seconds. A lead compensator is to be used to improve the transient response. (Note that nothing is plotted on the graph except for that...
 Question 1 (60 points) Consider the following block diagram where G (s) Froarss RMs) GIs) Gls) (a) Sketch the root locus assuming a proportional controller is used. (b) Assume design spocifications require a closed-loop pole at (-3+ j1). Design a lead compensator sure the root locus goes through this point. For the design, pick the pole of the compensator at -23 and analytically find its zero location. (c) Sketch the root locus with the lead compensator in place.
Question 1...
Question 1 (60 points) Consider the following block diagram where G (s) Froarss RMs) GIs) Gls) (a) Sketch the root locus assuming a proportional controller is used. (b) Assume design spocifications require a closed-loop pole at (-3+ j1). Design a lead compensator sure the root locus goes through this point. For the design, pick the pole of the compensator at -23 and analytically find its zero location. (c) Sketch the root locus with the lead compensator in place.
Question 1...
 Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus using the below procedures. (1) find poles and zeros and locate on complex domain (2) find number of branches (3) find asymptotes including centroid and angles of asymptotes (4) intersection at imaginary axis (5) find the angle of departure (6) draw the root migration (b) Find the range of K for which the feedback system is asymptotically stable.
Problem 3:...
Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus using the below procedures. (1) find poles and zeros and locate on complex domain (2) find number of branches (3) find asymptotes including centroid and angles of asymptotes (4) intersection at imaginary axis (5) find the angle of departure (6) draw the root migration (b) Find the range of K for which the feedback system is asymptotically stable.
Problem 3:...
 1 GH(s) (s24s3s2 + 10s 24) sketch the root locus and find the following: [Section: 8.5 a. The breakaway and break-in points b. The jo-axis crossing c. The range of gain to keep the system stable d. The value of K to yield a stable system with second-order complex poles, with a damping ratio of 0.5
1 GH(s) (s24s3s2 + 10s 24) sketch the root locus and find the following: [Section: 8.5 a. The breakaway and break-in points b. The...
1 GH(s) (s24s3s2 + 10s 24) sketch the root locus and find the following: [Section: 8.5 a. The breakaway and break-in points b. The jo-axis crossing c. The range of gain to keep the system stable d. The value of K to yield a stable system with second-order complex poles, with a damping ratio of 0.5
1 GH(s) (s24s3s2 + 10s 24) sketch the root locus and find the following: [Section: 8.5 a. The breakaway and break-in points b. The...
Most questions answered within 3 hours.
-
[1] Household statistics include individuals living alone or in
groups in:
A) apartments.
B) military barracks....
asked 13 minutes ago -
Japan’s combination of X and Y
Canada’s combination of X and Y
100x and 0y
50x...
asked 3 minutes ago -
Determine the temperature (in Celsius) at which 1.00 mole of an
ideal gas will have a...
asked 10 minutes ago -
What is the % w/v when 80 mL of a 2.0% solution is mixed with 50...
asked 17 minutes ago -
How can I solve the following using a TI83
Claim: Most adults would erase all of...
asked 29 minutes ago -
Analysis of 3-ethyl-3-buten-2-ol gave C, 72.13%; H, 11.92%.
Calculate the percent deviation of these results from...
asked 26 minutes ago -
Which VALS segment is most likely to have a top of the line
brand new (2015)...
asked 30 minutes ago -
Write a program to score the paper-rock-scissor game. Each of
two users types in either P,R...
asked 50 minutes ago -
Calculate the equillibrium constent K for a redox reaction that
has E°cell = -.98 V at...
asked 1 hour ago -
A concave spherical mirror has a radius of curvature of
magnitude 19.6 cm.
(a) Find the...
asked 1 hour ago -
3. draw a diagram of the magnetic field:
a. around a long straight wire with a...
asked 1 hour ago -
If you titrated 30.0 mL of 0.1 M HCl with 0.1 M NaOH, indicate
the approximate...
asked 1 hour ago