

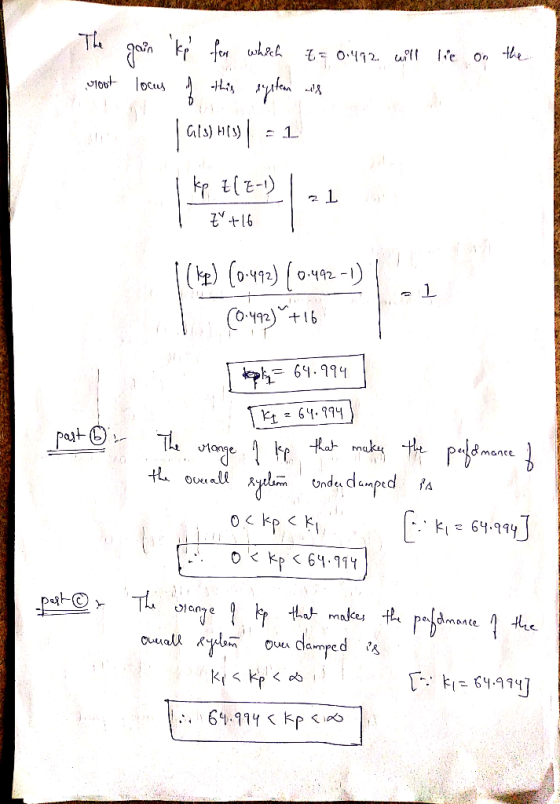
a) Draw a rough sketch of the root-locus of the above system showing only the values of Kp at zeros and poles. b) 10 points: Find the range of Kp that makes the performance of the overall system underdamped. c) 10 points: Find the range of Kp that makes the performance of the overall system overdamped.
Homework Answers


Add Answer to:
Prob. 3-25 points For this problem, use the root locus features to solve all parts: comp For: comp = a proportional controller = a positive gain Kp and z (z-1)/(z2 + 16) sys a) Draw a rough sket...
2. Consider the closed-loop system shown below Here Kp represents the gain of a proportional controller, and the proces...
 2. Consider the closed-loop system shown below
Here Kp represents the gain of a proportional controller, and
the process transfer function is given by
.
(a) Sketch the locus of the closed-loop poles as the
proportional gain, Kp, varies from 0 to ∞. Be sure to clearly mark
poles, zeros, asymptotes, angles of arrival/departure,
break-in/away points, and real axis portion of the locus.
(b) Using Routh's array, determine the range of the proportional
gain, Kp, for which the closed-loop system...
2. Consider the closed-loop system shown below
Here Kp represents the gain of a proportional controller, and
the process transfer function is given by
.
(a) Sketch the locus of the closed-loop poles as the
proportional gain, Kp, varies from 0 to ∞. Be sure to clearly mark
poles, zeros, asymptotes, angles of arrival/departure,
break-in/away points, and real axis portion of the locus.
(b) Using Routh's array, determine the range of the proportional
gain, Kp, for which the closed-loop system...
Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus us...
 Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus using the below procedures. (1) find poles and zeros and locate on complex domain (2) find number of branches (3) find asymptotes including centroid and angles of asymptotes (4) intersection at imaginary axis (5) find the angle of departure (6) draw the root migration (b) Find the range of K for which the feedback system is asymptotically stable.
Problem 3:...
Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus using the below procedures. (1) find poles and zeros and locate on complex domain (2) find number of branches (3) find asymptotes including centroid and angles of asymptotes (4) intersection at imaginary axis (5) find the angle of departure (6) draw the root migration (b) Find the range of K for which the feedback system is asymptotically stable.
Problem 3:...
Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifica...
 Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifications require a closed-loop pole at (-3+j1). Design a lead compensator to make sure the root locus goes through this point. For the design, pick the pole of the compensator at-23 and analytically find its zero. (Hint: Lead compensator transfer function will be Ge (s)$+23 First plot the poles and zeros...
Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifications require a closed-loop pole at (-3+j1). Design a lead compensator to make sure the root locus goes through this point. For the design, pick the pole of the compensator at-23 and analytically find its zero. (Hint: Lead compensator transfer function will be Ge (s)$+23 First plot the poles and zeros...
 2. Consider the closed-loop system shown below
Here Kp represents the gain of a proportional controller, and
the process transfer function is given by
.
(a) Sketch the locus of the closed-loop poles as the
proportional gain, Kp, varies from 0 to ∞. Be sure to clearly mark
poles, zeros, asymptotes, angles of arrival/departure,
break-in/away points, and real axis portion of the locus.
(b) Using Routh's array, determine the range of the proportional
gain, Kp, for which the closed-loop system...
2. Consider the closed-loop system shown below
Here Kp represents the gain of a proportional controller, and
the process transfer function is given by
.
(a) Sketch the locus of the closed-loop poles as the
proportional gain, Kp, varies from 0 to ∞. Be sure to clearly mark
poles, zeros, asymptotes, angles of arrival/departure,
break-in/away points, and real axis portion of the locus.
(b) Using Routh's array, determine the range of the proportional
gain, Kp, for which the closed-loop system...
 Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus using the below procedures. (1) find poles and zeros and locate on complex domain (2) find number of branches (3) find asymptotes including centroid and angles of asymptotes (4) intersection at imaginary axis (5) find the angle of departure (6) draw the root migration (b) Find the range of K for which the feedback system is asymptotically stable.
Problem 3:...
Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus using the below procedures. (1) find poles and zeros and locate on complex domain (2) find number of branches (3) find asymptotes including centroid and angles of asymptotes (4) intersection at imaginary axis (5) find the angle of departure (6) draw the root migration (b) Find the range of K for which the feedback system is asymptotically stable.
Problem 3:...
 Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifications require a closed-loop pole at (-3+j1). Design a lead compensator to make sure the root locus goes through this point. For the design, pick the pole of the compensator at-23 and analytically find its zero. (Hint: Lead compensator transfer function will be Ge (s)$+23 First plot the poles and zeros...
Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifications require a closed-loop pole at (-3+j1). Design a lead compensator to make sure the root locus goes through this point. For the design, pick the pole of the compensator at-23 and analytically find its zero. (Hint: Lead compensator transfer function will be Ge (s)$+23 First plot the poles and zeros...
Most questions answered within 3 hours.
-
1. Interferons elicit two types of responses to virus-infected
cells. What are these?
2. What are...
asked 25 seconds ago -
Manufacturer Limited ("Manufacturer") is a
dealer in carbon fiber. Stick Limited ("SL") makes
hockey sticks. On...
asked 6 minutes ago -
Two samples of n = 5 subjects were analyzed with an
independent-samples t-test, producing a t...
asked 5 minutes ago -
A bag of rice weighs 2.00 lb on Earth. What would it weigh on
the Moon,...
asked 10 minutes ago -
Discuss this concept: "In an economy without FIs, the level of
fund flows between household savers...
asked 15 minutes ago -
Rhonda Clark, a Slippery Rock, Pennsylvania, real estate
developer, has devised a regression model to help...
asked 20 minutes ago -
SO₂Cl₂(g) ⇌ SO₂(g) + Cl₂(g) Kp = 2.39 at 100°C. A quantity of
SO₂Cl₂ was introduced...
asked 43 minutes ago -
1. Using the ArrayList add() method, write the statement to
insert “July” in the first position...
asked 46 minutes ago -
Find the value of z such that 62.9% of the total area is to the
left...
asked 49 minutes ago -
How many moles are in 169 kg of Au?
asked 57 minutes ago -
If
a measure entity (thing) is a vector how many different types of
information are required...
asked 1 hour ago -
A speeding driver sees a police officer, hits her brakes, and
changes her speed from 45...
asked 1 hour ago