2. Consider the closed-loop system shown below
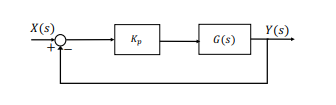
Here Kp represents the gain of a proportional controller, and
the process transfer function is given by 
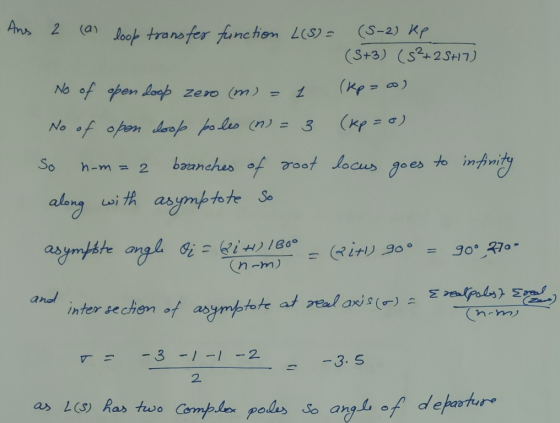
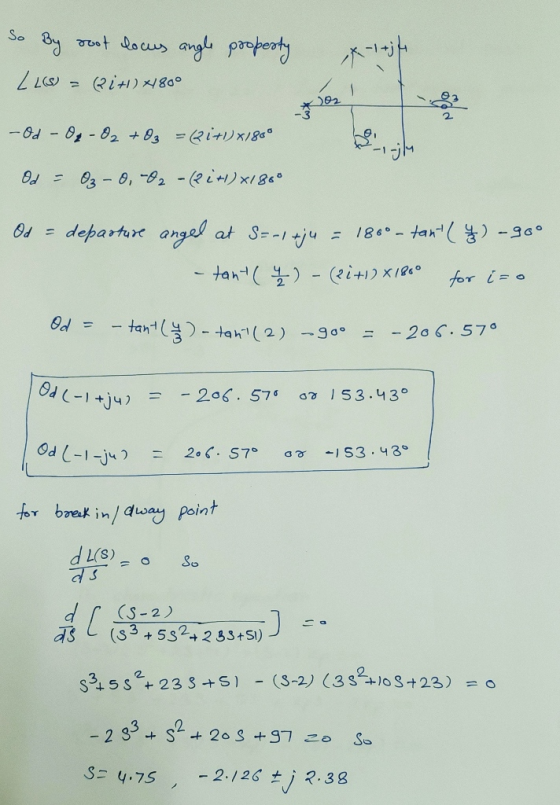
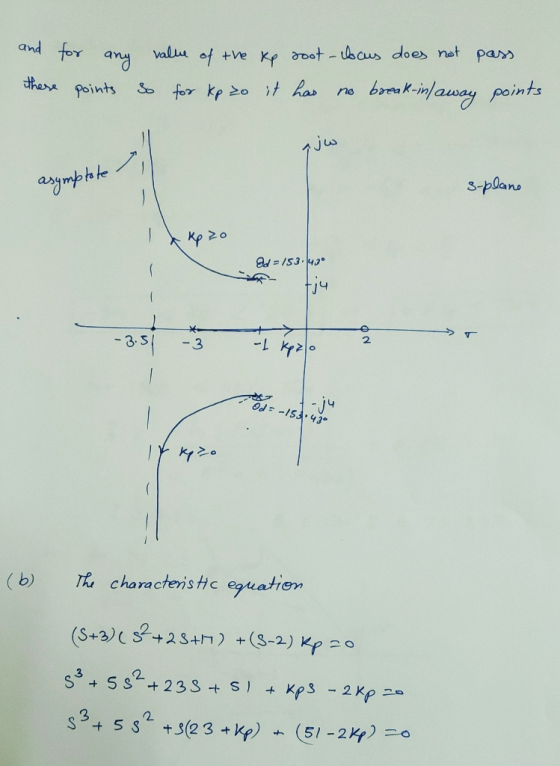
(a) Sketch the locus of the closed-loop poles as the proportional gain, Kp, varies from 0 to ∞. Be sure to clearly mark poles, zeros, asymptotes, angles of arrival/departure, break-in/away points, and real axis portion of the locus.
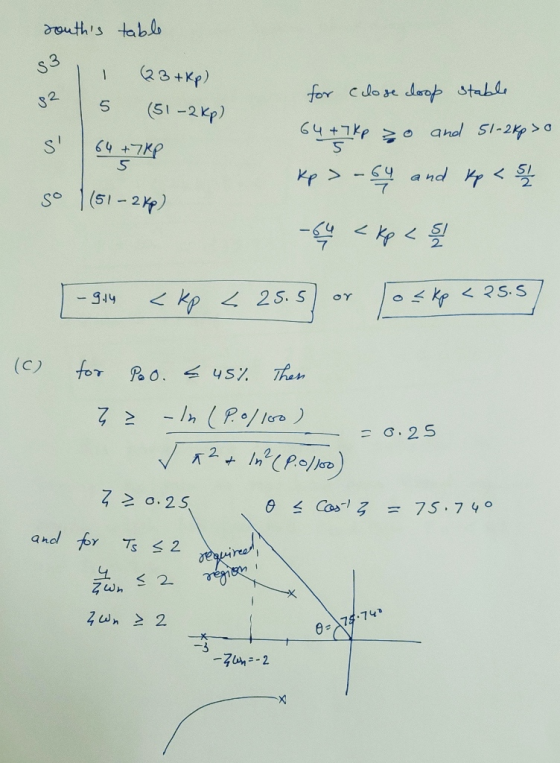
(b) Using Routh's array, determine the range of the proportional gain, Kp, for which the closed-loop system is stable.
(c) (6 points) Suppose we want the closed-loop system to have a
percentage overshoot less than 45% with a settling time less than 2
second. Can this performance criteria be satisfied by varying the
proportional gain, Kp? You may use the fact that the settling time


(s 2) (s +3)(s2 + 2s +17)
4 um
Homework Answers
Add Answer to:
2. Consider the closed-loop system shown below Here Kp represents the gain of a proportional controller, and the proces...
Determine the proportioanl gain constant Kp and T such that the bandwidth of the closed-loop system...
 Determine the proportioanl gain constant Kp and T such that the
bandwidth of the closed-loop system is around 0.55 rad/sec and an
overshoot of around 9%. Note that the closed-loop bandwidth is
close to the gain crossover (cut-off) frequency. Check your design
in both frequency and time domain and comment. Determine the
maximum overshoot and settling time. Determine as well, using a
Bode diagram, the expression of the stead state closed loop output
for a sinusodial input with 0 deg...
Determine the proportioanl gain constant Kp and T such that the
bandwidth of the closed-loop system is around 0.55 rad/sec and an
overshoot of around 9%. Note that the closed-loop bandwidth is
close to the gain crossover (cut-off) frequency. Check your design
in both frequency and time domain and comment. Determine the
maximum overshoot and settling time. Determine as well, using a
Bode diagram, the expression of the stead state closed loop output
for a sinusodial input with 0 deg...
BONUS QUESTION: Would you prefer an alternative controller with a stronger D-component, specifically, H(s)kp(l + 2s),...
 BONUS QUESTION: Would you prefer an alternative controller with a stronger D-component, specifically, H(s)kp(l + 2s), if your goal is a fast step response under the same contraints of a single overshoot and peak overshoot of less than 5%? Provide a detailed reason either with time-domain metrics (such as rise time or settling time) or by comparing and discussing the root locus curves for both cases 10 bonus points] Figure 4: Template for the root locus in Problem 2A. Mark...
BONUS QUESTION: Would you prefer an alternative controller with a stronger D-component, specifically, H(s)kp(l + 2s), if your goal is a fast step response under the same contraints of a single overshoot and peak overshoot of less than 5%? Provide a detailed reason either with time-domain metrics (such as rise time or settling time) or by comparing and discussing the root locus curves for both cases 10 bonus points] Figure 4: Template for the root locus in Problem 2A. Mark...
PROBLEMA: (25%) A closed-loop control system is shown below Ds) T(O) U(A) C(s) (a) Show that a proportional controller (C(s)-kp) will never make the closed-loop system stable. (8%) (Hint: you nee...
 PROBLEMA: (25%) A closed-loop control system is shown below Ds) T(O) U(A) C(s) (a) Show that a proportional controller (C(s)-kp) will never make the closed-loop system stable. (8%) (Hint: you need to calculate the closed-loop pole locations and make discussion for the two possible cases.) (Medim) (b) When a PD controller is used (C(s)kp+ kps), calculate the steady state tracking error when both R(s) and D(s) are unit steps. (8%) (Easy) (e) Suppose R(s) is a unit step and D(s)...
PROBLEMA: (25%) A closed-loop control system is shown below Ds) T(O) U(A) C(s) (a) Show that a proportional controller (C(s)-kp) will never make the closed-loop system stable. (8%) (Hint: you need to calculate the closed-loop pole locations and make discussion for the two possible cases.) (Medim) (b) When a PD controller is used (C(s)kp+ kps), calculate the steady state tracking error when both R(s) and D(s) are unit steps. (8%) (Easy) (e) Suppose R(s) is a unit step and D(s)...
Theroot-locus design method (d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angle...
 Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to...
 The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to K. [ Find the asymptotes and their angles, the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, imaginary axis crossing points, respectively (if any).
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is...
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to K. [ Find the asymptotes and their angles, the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, imaginary axis crossing points, respectively (if any).
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is...
For the closed-loop system shown, and given: G(s)= 20 * 2 / s2+ 5.76s+ 2 For the closed-loop system shown, and given: G(s)-20 ,7; 576st 2- Part A - Controller Design Find the proportional gain (...
 For the closed-loop system shown, and given:
G(s)= 20 * 2 /
s2+ 5.76s+ 2
For the closed-loop system shown, and given: G(s)-20 ,7; 576st 2- Part A - Controller Design Find the proportional gain (ie, C(s)-KP ) that would result in a rise time of tr-0.21 s vec Кр Previous Answers Request Answer Submit x Incorrect: Try Again
For the closed-loop system shown, and given: G(s)-20 ,7; 576st 2- Part A - Controller Design Find the proportional gain (ie,...
For the closed-loop system shown, and given:
G(s)= 20 * 2 /
s2+ 5.76s+ 2
For the closed-loop system shown, and given: G(s)-20 ,7; 576st 2- Part A - Controller Design Find the proportional gain (ie, C(s)-KP ) that would result in a rise time of tr-0.21 s vec Кр Previous Answers Request Answer Submit x Incorrect: Try Again
For the closed-loop system shown, and given: G(s)-20 ,7; 576st 2- Part A - Controller Design Find the proportional gain (ie,...
Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus us...
 Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus using the below procedures. (1) find poles and zeros and locate on complex domain (2) find number of branches (3) find asymptotes including centroid and angles of asymptotes (4) intersection at imaginary axis (5) find the angle of departure (6) draw the root migration (b) Find the range of K for which the feedback system is asymptotically stable.
Problem 3:...
Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus using the below procedures. (1) find poles and zeros and locate on complex domain (2) find number of branches (3) find asymptotes including centroid and angles of asymptotes (4) intersection at imaginary axis (5) find the angle of departure (6) draw the root migration (b) Find the range of K for which the feedback system is asymptotically stable.
Problem 3:...
a.)Determine the values of the poles and zeros of the closed loop system shown when the controller gain kc = 0. answer should be no zeros poles at s = 2.0 and -0.5 ± j b.) Compare these with the open...
 a.)Determine the values of the
poles and zeros of the closed loop system shown when the controller
gain kc = 0.
answer should be
no zeros
poles at s = 2.0 and -0.5 ± j
b.) Compare these with the open loop poles and zeros.
c.) Now determine the values of the poles and zeros at some very
high gain, say kc = 105 .
Determine the values of the poles and zeros of the closed loop system shown when...
a.)Determine the values of the
poles and zeros of the closed loop system shown when the controller
gain kc = 0.
answer should be
no zeros
poles at s = 2.0 and -0.5 ± j
b.) Compare these with the open loop poles and zeros.
c.) Now determine the values of the poles and zeros at some very
high gain, say kc = 105 .
Determine the values of the poles and zeros of the closed loop system shown when...
Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and...
 Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and derivative controller D(s) feedback path. KpKas placed on the 1. Sketch the root locus with respect to the parameter Ka knowing that Kp = 1. 2. Which value of Ka would you pick to reduce the settling time?
Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and derivative controller D(s) feedback path. KpKas placed on the 1....
Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and derivative controller D(s) feedback path. KpKas placed on the 1. Sketch the root locus with respect to the parameter Ka knowing that Kp = 1. 2. Which value of Ka would you pick to reduce the settling time?
Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and derivative controller D(s) feedback path. KpKas placed on the 1....
Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block...
 Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
 Determine the proportioanl gain constant Kp and T such that the
bandwidth of the closed-loop system is around 0.55 rad/sec and an
overshoot of around 9%. Note that the closed-loop bandwidth is
close to the gain crossover (cut-off) frequency. Check your design
in both frequency and time domain and comment. Determine the
maximum overshoot and settling time. Determine as well, using a
Bode diagram, the expression of the stead state closed loop output
for a sinusodial input with 0 deg...
Determine the proportioanl gain constant Kp and T such that the
bandwidth of the closed-loop system is around 0.55 rad/sec and an
overshoot of around 9%. Note that the closed-loop bandwidth is
close to the gain crossover (cut-off) frequency. Check your design
in both frequency and time domain and comment. Determine the
maximum overshoot and settling time. Determine as well, using a
Bode diagram, the expression of the stead state closed loop output
for a sinusodial input with 0 deg...
 BONUS QUESTION: Would you prefer an alternative controller with a stronger D-component, specifically, H(s)kp(l + 2s), if your goal is a fast step response under the same contraints of a single overshoot and peak overshoot of less than 5%? Provide a detailed reason either with time-domain metrics (such as rise time or settling time) or by comparing and discussing the root locus curves for both cases 10 bonus points] Figure 4: Template for the root locus in Problem 2A. Mark...
BONUS QUESTION: Would you prefer an alternative controller with a stronger D-component, specifically, H(s)kp(l + 2s), if your goal is a fast step response under the same contraints of a single overshoot and peak overshoot of less than 5%? Provide a detailed reason either with time-domain metrics (such as rise time or settling time) or by comparing and discussing the root locus curves for both cases 10 bonus points] Figure 4: Template for the root locus in Problem 2A. Mark...
 PROBLEMA: (25%) A closed-loop control system is shown below Ds) T(O) U(A) C(s) (a) Show that a proportional controller (C(s)-kp) will never make the closed-loop system stable. (8%) (Hint: you need to calculate the closed-loop pole locations and make discussion for the two possible cases.) (Medim) (b) When a PD controller is used (C(s)kp+ kps), calculate the steady state tracking error when both R(s) and D(s) are unit steps. (8%) (Easy) (e) Suppose R(s) is a unit step and D(s)...
PROBLEMA: (25%) A closed-loop control system is shown below Ds) T(O) U(A) C(s) (a) Show that a proportional controller (C(s)-kp) will never make the closed-loop system stable. (8%) (Hint: you need to calculate the closed-loop pole locations and make discussion for the two possible cases.) (Medim) (b) When a PD controller is used (C(s)kp+ kps), calculate the steady state tracking error when both R(s) and D(s) are unit steps. (8%) (Easy) (e) Suppose R(s) is a unit step and D(s)...
 Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
 The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to K. [ Find the asymptotes and their angles, the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, imaginary axis crossing points, respectively (if any).
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is...
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is given s3 + 2s2 + (20K +7)s+ 100K Sketch the root locus of the given system above with respect to K. [ Find the asymptotes and their angles, the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, imaginary axis crossing points, respectively (if any).
The characteristic equation (denominator of the closed-loop transfer function set equal to zero) is...
 For the closed-loop system shown, and given:
G(s)= 20 * 2 /
s2+ 5.76s+ 2
For the closed-loop system shown, and given: G(s)-20 ,7; 576st 2- Part A - Controller Design Find the proportional gain (ie, C(s)-KP ) that would result in a rise time of tr-0.21 s vec Кр Previous Answers Request Answer Submit x Incorrect: Try Again
For the closed-loop system shown, and given: G(s)-20 ,7; 576st 2- Part A - Controller Design Find the proportional gain (ie,...
For the closed-loop system shown, and given:
G(s)= 20 * 2 /
s2+ 5.76s+ 2
For the closed-loop system shown, and given: G(s)-20 ,7; 576st 2- Part A - Controller Design Find the proportional gain (ie, C(s)-KP ) that would result in a rise time of tr-0.21 s vec Кр Previous Answers Request Answer Submit x Incorrect: Try Again
For the closed-loop system shown, and given: G(s)-20 ,7; 576st 2- Part A - Controller Design Find the proportional gain (ie,...
 Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus using the below procedures. (1) find poles and zeros and locate on complex domain (2) find number of branches (3) find asymptotes including centroid and angles of asymptotes (4) intersection at imaginary axis (5) find the angle of departure (6) draw the root migration (b) Find the range of K for which the feedback system is asymptotically stable.
Problem 3:...
Problem 3: (30) Consider the following systen where K is a proportional gain (K>0). s-2 (a) Sketch the root locus using the below procedures. (1) find poles and zeros and locate on complex domain (2) find number of branches (3) find asymptotes including centroid and angles of asymptotes (4) intersection at imaginary axis (5) find the angle of departure (6) draw the root migration (b) Find the range of K for which the feedback system is asymptotically stable.
Problem 3:...
 a.)Determine the values of the
poles and zeros of the closed loop system shown when the controller
gain kc = 0.
answer should be
no zeros
poles at s = 2.0 and -0.5 ± j
b.) Compare these with the open loop poles and zeros.
c.) Now determine the values of the poles and zeros at some very
high gain, say kc = 105 .
Determine the values of the poles and zeros of the closed loop system shown when...
a.)Determine the values of the
poles and zeros of the closed loop system shown when the controller
gain kc = 0.
answer should be
no zeros
poles at s = 2.0 and -0.5 ± j
b.) Compare these with the open loop poles and zeros.
c.) Now determine the values of the poles and zeros at some very
high gain, say kc = 105 .
Determine the values of the poles and zeros of the closed loop system shown when...
 Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and derivative controller D(s) feedback path. KpKas placed on the 1. Sketch the root locus with respect to the parameter Ka knowing that Kp = 1. 2. Which value of Ka would you pick to reduce the settling time?
Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and derivative controller D(s) feedback path. KpKas placed on the 1....
Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and derivative controller D(s) feedback path. KpKas placed on the 1. Sketch the root locus with respect to the parameter Ka knowing that Kp = 1. 2. Which value of Ka would you pick to reduce the settling time?
Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and derivative controller D(s) feedback path. KpKas placed on the 1....
 Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
Spring 2019 3. Given a closed-loop control system with unity feedback is shown in the block diagram. G(s) is the open-loop transfer function, and the controller is a gain, K. 1. (20) Calculate the open-loop transfer function tar →Q--t G(s) (10) Calculate the steady-state error to a step input of the open-loop system. 7. (in Bode Form) from the Bode plot. (10) Calculate the shortest possible settling time with a percentage overshoot of 5% or less. 8. 2. (10)Plot the...
Most questions answered within 3 hours.
-
Based on the range, which of the following sets of scores has
the greatest variability? 3,...
asked 38 minutes ago -
Ripples in a pond travel at a velocity of 3 m/s with one peak
passing a...
asked 28 minutes ago -
A man stands on the roof of a building of height 13.0 mm and
throws a...
asked 34 minutes ago -
The extent to which assets are financed by borrowed funds and
other liabilities is indicated by:...
asked 1 hour ago -
Explain in detail
Germany is the fifth largest economy
explain what goods and services Germany specializes...
asked 1 hour ago -
The density of platinum is 21.45 g/mL. If a cube of platinum
with a mass of...
asked 1 hour ago -
Accounts Receivable
Sales
A/R Posting
Extended Sales Invoice
Packing Slip
Compare invoice to packing slip 2...
asked 1 hour ago -
Michaella, age 23, is a full-time law student and is claimed by
her parents as a...
asked 1 hour ago -
Why are polymers not typically casted into products?
asked 2 hours ago -
When rolling a die 129 times, what is the probability of rolling
a 6 no more...
asked 2 hours ago -
4. A call option currently sells for $7.75. It has a strike
price of $85 and...
asked 2 hours ago -
1.
You need to prepare 10.0 liters of an acid aqueous solution with a
pH of...
asked 2 hours ago