
Homework Answers
Add Answer to:
Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and...
Problem 3 Consider the transfer function: 108 (s2 5s +100) (s + 1000)2 G(s) 1. Sketch...
 Problem 3 Consider the transfer function: 108 (s2 5s +100) (s + 1000)2 G(s) 1. Sketch the bode diagram for G. 2. Knowing that a proportional controller with gain 1000 in a unity feedback loop with G results in an unstable system, what are the phase and gain margins of G? 3. Design a proportional controller that achieves a gain margin of 40dB. gain of 10dB at 0.01rad/s and a gain margin 4. Design that is infinity. compensator that results...
Problem 3 Consider the transfer function: 108 (s2 5s +100) (s + 1000)2 G(s) 1. Sketch the bode diagram for G. 2. Knowing that a proportional controller with gain 1000 in a unity feedback loop with G results in an unstable system, what are the phase and gain margins of G? 3. Design a proportional controller that achieves a gain margin of 40dB. gain of 10dB at 0.01rad/s and a gain margin 4. Design that is infinity. compensator that results...
2. Consider the closed-loop system shown below Here Kp represents the gain of a proportional controller, and the proces...
 2. Consider the closed-loop system shown below
Here Kp represents the gain of a proportional controller, and
the process transfer function is given by
.
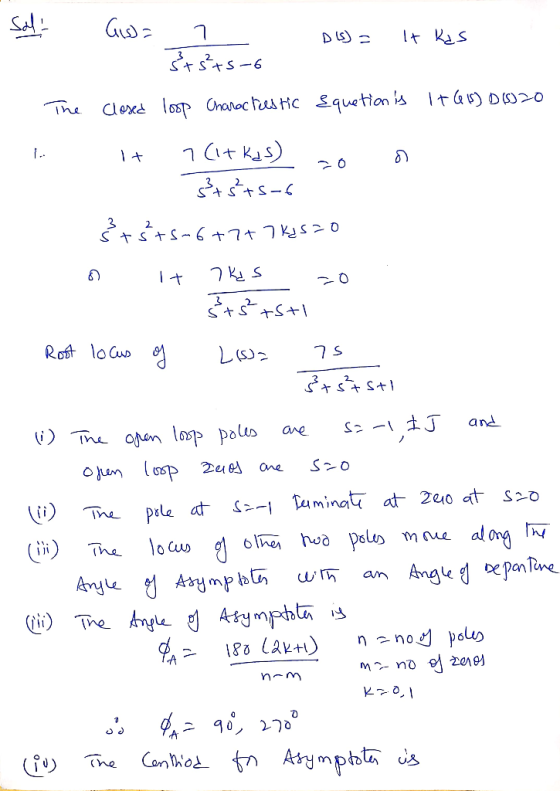
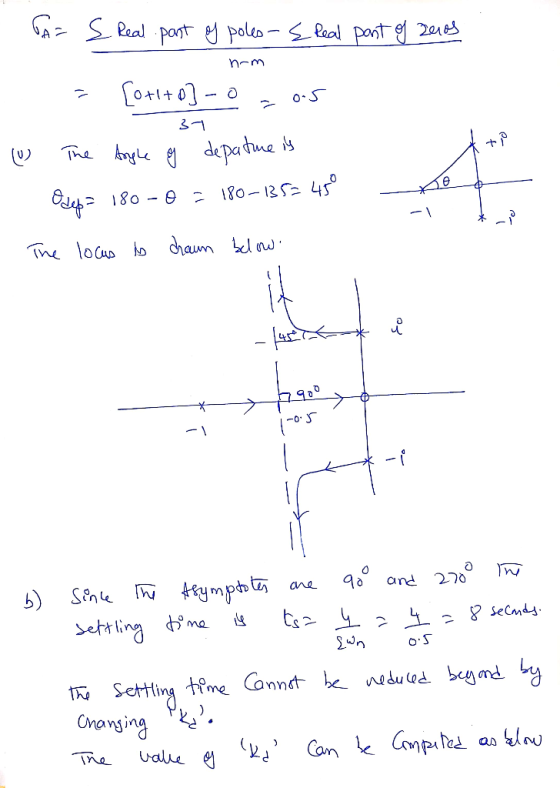
(a) Sketch the locus of the closed-loop poles as the
proportional gain, Kp, varies from 0 to ∞. Be sure to clearly mark
poles, zeros, asymptotes, angles of arrival/departure,
break-in/away points, and real axis portion of the locus.
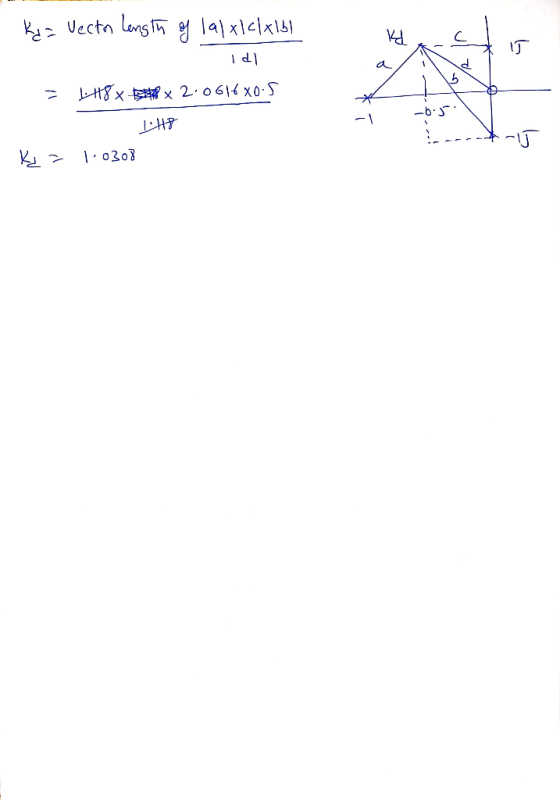
(b) Using Routh's array, determine the range of the proportional
gain, Kp, for which the closed-loop system...
2. Consider the closed-loop system shown below
Here Kp represents the gain of a proportional controller, and
the process transfer function is given by
.
(a) Sketch the locus of the closed-loop poles as the
proportional gain, Kp, varies from 0 to ∞. Be sure to clearly mark
poles, zeros, asymptotes, angles of arrival/departure,
break-in/away points, and real axis portion of the locus.
(b) Using Routh's array, determine the range of the proportional
gain, Kp, for which the closed-loop system...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root lo...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controlle...
 A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controller by Consider feedback control with unit feedback gain as shown in Figure 1 A disturbance D(s) exists, and to achieve zero steady-state error, a small integral component is applied. Technical limitations restrict the controller gain kp to values of 0.2 or less. The goal is to examine the influence of the controller parameter k on the dynamic response. D(s) Controller Process X(s) Y(s) Figure...
A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controller by Consider feedback control with unit feedback gain as shown in Figure 1 A disturbance D(s) exists, and to achieve zero steady-state error, a small integral component is applied. Technical limitations restrict the controller gain kp to values of 0.2 or less. The goal is to examine the influence of the controller parameter k on the dynamic response. D(s) Controller Process X(s) Y(s) Figure...
Required Plant Transfer Function! 사, (H183) 3. Design the proportional (Kp) and derivative (Ka) ...
 I need help with the following:
Required Plant Transfer Function! 사, (H183) 3. Design the proportional (Kp) and derivative (Ka) coefficients for a controller in Propotional- Derivative with Derivative on Output Only (PD-DOO) form. (Fig. 4). T(t) Gp(s) Figure 4: Proportional-Derivative closed loop control with Derivative-on-Output-Only Derive the closed loop transfer function, G2(s). Let the desired specifications of the compensated, closed loop system be wn 12 and-0.6 -In this configuration the known parameters are J, c, wn and Ç. Determine...
I need help with the following:
Required Plant Transfer Function! 사, (H183) 3. Design the proportional (Kp) and derivative (Ka) coefficients for a controller in Propotional- Derivative with Derivative on Output Only (PD-DOO) form. (Fig. 4). T(t) Gp(s) Figure 4: Proportional-Derivative closed loop control with Derivative-on-Output-Only Derive the closed loop transfer function, G2(s). Let the desired specifications of the compensated, closed loop system be wn 12 and-0.6 -In this configuration the known parameters are J, c, wn and Ç. Determine...
Given a transfer function: a. Sketch the root locus of G(s) b. Calculate the proportional gain required for to place the dominant poles at this point: s = -1.5-j3.5 c for G(s) give the controller :...
 Given a transfer function:
a. Sketch the root locus of G(s)
b. Calculate the proportional gain required for to place the
dominant poles at this point: s = -1.5-j3.5
c for G(s) give the controller :
considered closed loop, plot root locus for this system
7 (s + 5) (s + 2)(s2 + 6s + 10) G (s) H(s) = Ks +5
7 (s + 5) (s + 2)(s2 + 6s + 10) G (s)
H(s) = Ks +5
Given a transfer function:
a. Sketch the root locus of G(s)
b. Calculate the proportional gain required for to place the
dominant poles at this point: s = -1.5-j3.5
c for G(s) give the controller :
considered closed loop, plot root locus for this system
7 (s + 5) (s + 2)(s2 + 6s + 10) G (s) H(s) = Ks +5
7 (s + 5) (s + 2)(s2 + 6s + 10) G (s)
H(s) = Ks +5
1) Plot the root locus of the system whose characteristic equation is 2) Plot the root locus of the closed loop system whose open-loop transfer function is given as 2s + 2 G(S)H(S)+7s3 +10s2 3)...
 1) Plot the root locus of the system whose characteristic equation is 2) Plot the root locus of the closed loop system whose open-loop transfer function is given as 2s + 2 G(S)H(S)+7s3 +10s2 3) Plot root locus of the closed-loop system for which feedforward transfer function is s + 1 G(S) s( ) St(s - and feedback transfer function is H(S)2 +8s +32
1) Plot the root locus of the system whose characteristic equation is 2) Plot the root...
1) Plot the root locus of the system whose characteristic equation is 2) Plot the root locus of the closed loop system whose open-loop transfer function is given as 2s + 2 G(S)H(S)+7s3 +10s2 3) Plot root locus of the closed-loop system for which feedforward transfer function is s + 1 G(S) s( ) St(s - and feedback transfer function is H(S)2 +8s +32
1) Plot the root locus of the system whose characteristic equation is 2) Plot the root...
1. Consider a unity feedback control system with the transfer function G(s) = 1/[s(s+ 2)] in...
1. Consider a unity feedback control system with the transfer function G(s) = 1/[s(s+ 2)] in the forward path. (a) Design a proportional controller that yields a stable system with percent overshoot less that 5% for the step input (b) Find settling time and peak time of the closed-loop system designed in part (a); (c) Design a PD compensator that reduces the settling time computed in (b) by a factor of 4 while keeping the percent overshoot less that 5%...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller trans...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Problem (2) The open loop transfer function of a feedback system is given by к H...
 Problem (2) The open loop transfer function of a feedback system is given by к H (s) = 10 G(s) = ------ - s (s +1) (0.2 s+ 1) Design a controller such that the closed loop system will have a settling time less than 1.0 sec. and a percentage overshoot (PO) less than 5%. Draw the root locus plots of the uncompensated and compensated systems using Matlab.
Problem (2) The open loop transfer function of a feedback system is given by к H (s) = 10 G(s) = ------ - s (s +1) (0.2 s+ 1) Design a controller such that the closed loop system will have a settling time less than 1.0 sec. and a percentage overshoot (PO) less than 5%. Draw the root locus plots of the uncompensated and compensated systems using Matlab.
 Problem 3 Consider the transfer function: 108 (s2 5s +100) (s + 1000)2 G(s) 1. Sketch the bode diagram for G. 2. Knowing that a proportional controller with gain 1000 in a unity feedback loop with G results in an unstable system, what are the phase and gain margins of G? 3. Design a proportional controller that achieves a gain margin of 40dB. gain of 10dB at 0.01rad/s and a gain margin 4. Design that is infinity. compensator that results...
Problem 3 Consider the transfer function: 108 (s2 5s +100) (s + 1000)2 G(s) 1. Sketch the bode diagram for G. 2. Knowing that a proportional controller with gain 1000 in a unity feedback loop with G results in an unstable system, what are the phase and gain margins of G? 3. Design a proportional controller that achieves a gain margin of 40dB. gain of 10dB at 0.01rad/s and a gain margin 4. Design that is infinity. compensator that results...
 2. Consider the closed-loop system shown below
Here Kp represents the gain of a proportional controller, and
the process transfer function is given by
.
(a) Sketch the locus of the closed-loop poles as the
proportional gain, Kp, varies from 0 to ∞. Be sure to clearly mark
poles, zeros, asymptotes, angles of arrival/departure,
break-in/away points, and real axis portion of the locus.
(b) Using Routh's array, determine the range of the proportional
gain, Kp, for which the closed-loop system...
2. Consider the closed-loop system shown below
Here Kp represents the gain of a proportional controller, and
the process transfer function is given by
.
(a) Sketch the locus of the closed-loop poles as the
proportional gain, Kp, varies from 0 to ∞. Be sure to clearly mark
poles, zeros, asymptotes, angles of arrival/departure,
break-in/away points, and real axis portion of the locus.
(b) Using Routh's array, determine the range of the proportional
gain, Kp, for which the closed-loop system...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
 A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controller by Consider feedback control with unit feedback gain as shown in Figure 1 A disturbance D(s) exists, and to achieve zero steady-state error, a small integral component is applied. Technical limitations restrict the controller gain kp to values of 0.2 or less. The goal is to examine the influence of the controller parameter k on the dynamic response. D(s) Controller Process X(s) Y(s) Figure...
A second-order process is described by its transfer function G(s) = (s+1)(843) and a PI controller by Consider feedback control with unit feedback gain as shown in Figure 1 A disturbance D(s) exists, and to achieve zero steady-state error, a small integral component is applied. Technical limitations restrict the controller gain kp to values of 0.2 or less. The goal is to examine the influence of the controller parameter k on the dynamic response. D(s) Controller Process X(s) Y(s) Figure...
 I need help with the following:
Required Plant Transfer Function! 사, (H183) 3. Design the proportional (Kp) and derivative (Ka) coefficients for a controller in Propotional- Derivative with Derivative on Output Only (PD-DOO) form. (Fig. 4). T(t) Gp(s) Figure 4: Proportional-Derivative closed loop control with Derivative-on-Output-Only Derive the closed loop transfer function, G2(s). Let the desired specifications of the compensated, closed loop system be wn 12 and-0.6 -In this configuration the known parameters are J, c, wn and Ç. Determine...
I need help with the following:
Required Plant Transfer Function! 사, (H183) 3. Design the proportional (Kp) and derivative (Ka) coefficients for a controller in Propotional- Derivative with Derivative on Output Only (PD-DOO) form. (Fig. 4). T(t) Gp(s) Figure 4: Proportional-Derivative closed loop control with Derivative-on-Output-Only Derive the closed loop transfer function, G2(s). Let the desired specifications of the compensated, closed loop system be wn 12 and-0.6 -In this configuration the known parameters are J, c, wn and Ç. Determine...
 Given a transfer function:
a. Sketch the root locus of G(s)
b. Calculate the proportional gain required for to place the
dominant poles at this point: s = -1.5-j3.5
c for G(s) give the controller :
considered closed loop, plot root locus for this system
7 (s + 5) (s + 2)(s2 + 6s + 10) G (s) H(s) = Ks +5
7 (s + 5) (s + 2)(s2 + 6s + 10) G (s)
H(s) = Ks +5
Given a transfer function:
a. Sketch the root locus of G(s)
b. Calculate the proportional gain required for to place the
dominant poles at this point: s = -1.5-j3.5
c for G(s) give the controller :
considered closed loop, plot root locus for this system
7 (s + 5) (s + 2)(s2 + 6s + 10) G (s) H(s) = Ks +5
7 (s + 5) (s + 2)(s2 + 6s + 10) G (s)
H(s) = Ks +5
 1) Plot the root locus of the system whose characteristic equation is 2) Plot the root locus of the closed loop system whose open-loop transfer function is given as 2s + 2 G(S)H(S)+7s3 +10s2 3) Plot root locus of the closed-loop system for which feedforward transfer function is s + 1 G(S) s( ) St(s - and feedback transfer function is H(S)2 +8s +32
1) Plot the root locus of the system whose characteristic equation is 2) Plot the root...
1) Plot the root locus of the system whose characteristic equation is 2) Plot the root locus of the closed loop system whose open-loop transfer function is given as 2s + 2 G(S)H(S)+7s3 +10s2 3) Plot root locus of the closed-loop system for which feedforward transfer function is s + 1 G(S) s( ) St(s - and feedback transfer function is H(S)2 +8s +32
1) Plot the root locus of the system whose characteristic equation is 2) Plot the root...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
 Problem (2) The open loop transfer function of a feedback system is given by к H (s) = 10 G(s) = ------ - s (s +1) (0.2 s+ 1) Design a controller such that the closed loop system will have a settling time less than 1.0 sec. and a percentage overshoot (PO) less than 5%. Draw the root locus plots of the uncompensated and compensated systems using Matlab.
Problem (2) The open loop transfer function of a feedback system is given by к H (s) = 10 G(s) = ------ - s (s +1) (0.2 s+ 1) Design a controller such that the closed loop system will have a settling time less than 1.0 sec. and a percentage overshoot (PO) less than 5%. Draw the root locus plots of the uncompensated and compensated systems using Matlab.
Most questions answered within 3 hours.
-
Problem 16-51 Sales
Activity Variance (LO 16-3)Odessa, Inc., reports the following
information concerning operations for the...
asked 5 minutes ago -
Pictured on the right are thee point charges Q1 = 18.4 μC, Q2 =
-30.6 μC,...
asked 7 minutes ago -
A graduate student is conducting research in psychology and
needs to obtain the IQ scores of...
asked 44 minutes ago -
R2.84: There are 2 defective products in a production lot of 10.
An inspector randomly selected...
asked 2 hours ago -
Consider the following equilibrium system: COCl2(g) CO(g) +
Cl2(g) A 10.00 L evacuated flask is filled...
asked 2 hours ago -
1) What are the two distinct steps that one needs to perform
when developing a data...
asked 2 hours ago -
2) Write a C++ program that uses a class called “Degree” to
obtain the trigonometric
values...
asked 3 hours ago -
1. In eukaryotic cells the genomes of
&
asked 3 hours ago -
The standard enthalpy of propanol (C3H7OH) is -303.0 kJ/mol.
Compute both of the
gross and net...
asked 3 hours ago -
Why PWM using H-bridge for control motor speed is more power
effiecient than the linear amplifier...
asked 3 hours ago -
In 1999, Carly Fiorina famously said,"I hope that we are at a
point that everyone is...
asked 3 hours ago -
Individuals in a species of moth vary in wing color from white to
black, but all...
asked 4 hours ago