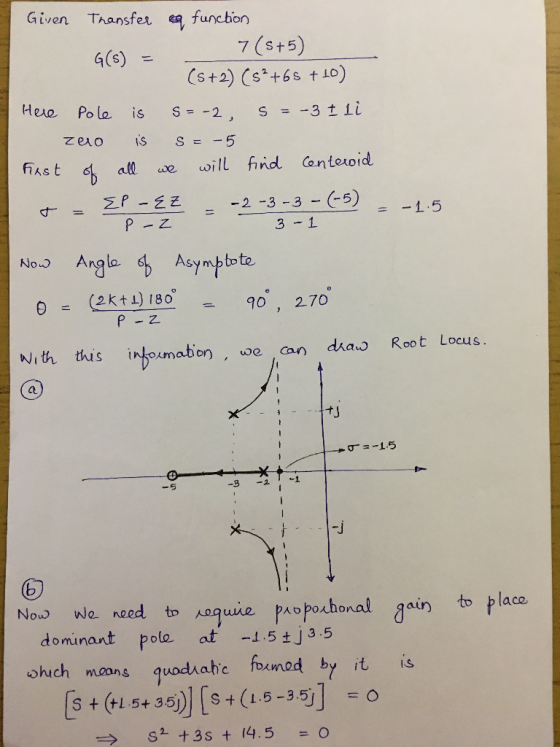
Given a transfer function:

a. Sketch the root locus of G(s)
b. Calculate the proportional gain required for to place the dominant poles at this point: s = -1.5-j3.5
c for G(s) give the controller :

considered closed loop, plot root locus for this system
H(s) = Ks +5
Homework Answers

Add Answer to:
Given a transfer function: a. Sketch the root locus of G(s) b. Calculate the proportional gain required for to place the dominant poles at this point: s = -1.5-j3.5 c for G(s) give the controller :...
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3 s+7) the complex poles. G(s) (s +3) i) Determine the joo -axis crossing, breakaway point and the...
 Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3 s+7) the complex poles. G(s) (s +3) i) Determine the joo -axis crossing, breakaway point and the angle of departure from (i) Determine the value of the gain for which the closed loop system will have a pole at (-10)
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3...
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3 s+7) the complex poles. G(s) (s +3) i) Determine the joo -axis crossing, breakaway point and the angle of departure from (i) Determine the value of the gain for which the closed loop system will have a pole at (-10)
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3...
Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifica...
 Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifications require a closed-loop pole at (-3+j1). Design a lead compensator to make sure the root locus goes through this point. For the design, pick the pole of the compensator at-23 and analytically find its zero. (Hint: Lead compensator transfer function will be Ge (s)$+23 First plot the poles and zeros...
Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifications require a closed-loop pole at (-3+j1). Design a lead compensator to make sure the root locus goes through this point. For the design, pick the pole of the compensator at-23 and analytically find its zero. (Hint: Lead compensator transfer function will be Ge (s)$+23 First plot the poles and zeros...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root lo...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
Theroot-locus design method (d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angle...
 Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
Given the transfer function 4. G(s)H(s) - (s + 8) (s +6s + 13) (a) Sketch the root locus plot using Matlab. (b) Estimate the system gain when the damping ratio is 7 0.707 (c) Add a simple pole, (s...
 Given the transfer function 4. G(s)H(s) - (s + 8) (s +6s + 13) (a) Sketch the root locus plot using Matlab. (b) Estimate the system gain when the damping ratio is 7 0.707 (c) Add a simple pole, (s 2), to G (s)H (s) and examine the resulting root locus (d) Add a simple zero, (s +2), to G(s)H(s) and examine the resulting root locus
Given the transfer function 4. G(s)H(s) - (s + 8) (s +6s + 13)...
Given the transfer function 4. G(s)H(s) - (s + 8) (s +6s + 13) (a) Sketch the root locus plot using Matlab. (b) Estimate the system gain when the damping ratio is 7 0.707 (c) Add a simple pole, (s 2), to G (s)H (s) and examine the resulting root locus (d) Add a simple zero, (s +2), to G(s)H(s) and examine the resulting root locus
Given the transfer function 4. G(s)H(s) - (s + 8) (s +6s + 13)...
2. Controller Design For each of the following plants G, design a compensator G, so that the closed loop system KG, G (1 + KG, G has two dominant poles near 2 ± i Plot a root locus plot for the s...
 2. Controller Design For each of the following plants G, design a compensator G, so that the closed loop system KG, G (1 + KG, G has two dominant poles near 2 ± i Plot a root locus plot for the system before adding the compensator and another plot for after. Use the simplest G that you can find. Determine the gain K that will achieve the desired poles 142
2. Controller Design For each of the following plants G,...
2. Controller Design For each of the following plants G, design a compensator G, so that the closed loop system KG, G (1 + KG, G has two dominant poles near 2 ± i Plot a root locus plot for the system before adding the compensator and another plot for after. Use the simplest G that you can find. Determine the gain K that will achieve the desired poles 142
2. Controller Design For each of the following plants G,...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the d...
 3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and...
 Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and derivative controller D(s) feedback path. KpKas placed on the 1. Sketch the root locus with respect to the parameter Ka knowing that Kp = 1. 2. Which value of Ka would you pick to reduce the settling time?
Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and derivative controller D(s) feedback path. KpKas placed on the 1....
Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and derivative controller D(s) feedback path. KpKas placed on the 1. Sketch the root locus with respect to the parameter Ka knowing that Kp = 1. 2. Which value of Ka would you pick to reduce the settling time?
Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and derivative controller D(s) feedback path. KpKas placed on the 1....
Question 1 (60 points) Consider the following block diagram where G (s) Froarss RMs) GIs) Gls) (a) Sketch the root locus assuming a proportional controller is used. (b) Assume design spocifications r...
 Question 1 (60 points) Consider the following block diagram where G (s) Froarss RMs) GIs) Gls) (a) Sketch the root locus assuming a proportional controller is used. (b) Assume design spocifications require a closed-loop pole at (-3+ j1). Design a lead compensator sure the root locus goes through this point. For the design, pick the pole of the compensator at -23 and analytically find its zero location. (c) Sketch the root locus with the lead compensator in place.
Question 1...
Question 1 (60 points) Consider the following block diagram where G (s) Froarss RMs) GIs) Gls) (a) Sketch the root locus assuming a proportional controller is used. (b) Assume design spocifications require a closed-loop pole at (-3+ j1). Design a lead compensator sure the root locus goes through this point. For the design, pick the pole of the compensator at -23 and analytically find its zero location. (c) Sketch the root locus with the lead compensator in place.
Question 1...
 Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3 s+7) the complex poles. G(s) (s +3) i) Determine the joo -axis crossing, breakaway point and the angle of departure from (i) Determine the value of the gain for which the closed loop system will have a pole at (-10)
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3...
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3 s+7) the complex poles. G(s) (s +3) i) Determine the joo -axis crossing, breakaway point and the angle of departure from (i) Determine the value of the gain for which the closed loop system will have a pole at (-10)
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3...
 Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifications require a closed-loop pole at (-3+j1). Design a lead compensator to make sure the root locus goes through this point. For the design, pick the pole of the compensator at-23 and analytically find its zero. (Hint: Lead compensator transfer function will be Ge (s)$+23 First plot the poles and zeros...
Question 1 (60 points) Consider the following block diagram where G(s)- Controller R(s) G(s) (a) Sketch the root locus assuming a proportional controller is used. [25 points] (b) Design specifications require a closed-loop pole at (-3+j1). Design a lead compensator to make sure the root locus goes through this point. For the design, pick the pole of the compensator at-23 and analytically find its zero. (Hint: Lead compensator transfer function will be Ge (s)$+23 First plot the poles and zeros...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
 Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
Theroot-locus design method
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root locus plot. Find the asymptotes and their angles. the break-away or break-in points, the angle of arrival or departure for the complex poles and zeros, respectively, and the range of k for closed-loop stability 5 10ん k(s+21
(d) Gos)H(s)2) 5.5 Complex poles and zeros. For the systems with an open-loop transfer function given below, sketch the root...
 Given the transfer function 4. G(s)H(s) - (s + 8) (s +6s + 13) (a) Sketch the root locus plot using Matlab. (b) Estimate the system gain when the damping ratio is 7 0.707 (c) Add a simple pole, (s 2), to G (s)H (s) and examine the resulting root locus (d) Add a simple zero, (s +2), to G(s)H(s) and examine the resulting root locus
Given the transfer function 4. G(s)H(s) - (s + 8) (s +6s + 13)...
Given the transfer function 4. G(s)H(s) - (s + 8) (s +6s + 13) (a) Sketch the root locus plot using Matlab. (b) Estimate the system gain when the damping ratio is 7 0.707 (c) Add a simple pole, (s 2), to G (s)H (s) and examine the resulting root locus (d) Add a simple zero, (s +2), to G(s)H(s) and examine the resulting root locus
Given the transfer function 4. G(s)H(s) - (s + 8) (s +6s + 13)...
 2. Controller Design For each of the following plants G, design a compensator G, so that the closed loop system KG, G (1 + KG, G has two dominant poles near 2 ± i Plot a root locus plot for the system before adding the compensator and another plot for after. Use the simplest G that you can find. Determine the gain K that will achieve the desired poles 142
2. Controller Design For each of the following plants G,...
2. Controller Design For each of the following plants G, design a compensator G, so that the closed loop system KG, G (1 + KG, G has two dominant poles near 2 ± i Plot a root locus plot for the system before adding the compensator and another plot for after. Use the simplest G that you can find. Determine the gain K that will achieve the desired poles 142
2. Controller Design For each of the following plants G,...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
 3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
 Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and derivative controller D(s) feedback path. KpKas placed on the 1. Sketch the root locus with respect to the parameter Ka knowing that Kp = 1. 2. Which value of Ka would you pick to reduce the settling time?
Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and derivative controller D(s) feedback path. KpKas placed on the 1....
Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and derivative controller D(s) feedback path. KpKas placed on the 1. Sketch the root locus with respect to the parameter Ka knowing that Kp = 1. 2. Which value of Ka would you pick to reduce the settling time?
Consider the transfer function Problem 2: 7 G(s) (s2 1)(s17 in closed-loop with a proportional and derivative controller D(s) feedback path. KpKas placed on the 1....
 Question 1 (60 points) Consider the following block diagram where G (s) Froarss RMs) GIs) Gls) (a) Sketch the root locus assuming a proportional controller is used. (b) Assume design spocifications require a closed-loop pole at (-3+ j1). Design a lead compensator sure the root locus goes through this point. For the design, pick the pole of the compensator at -23 and analytically find its zero location. (c) Sketch the root locus with the lead compensator in place.
Question 1...
Question 1 (60 points) Consider the following block diagram where G (s) Froarss RMs) GIs) Gls) (a) Sketch the root locus assuming a proportional controller is used. (b) Assume design spocifications require a closed-loop pole at (-3+ j1). Design a lead compensator sure the root locus goes through this point. For the design, pick the pole of the compensator at -23 and analytically find its zero location. (c) Sketch the root locus with the lead compensator in place.
Question 1...
Most questions answered within 3 hours.
-
Write a program to solve the Josephus problem, with the following
modification:
Sample Input:
./a.out n...
asked 1 hour ago -
At the start of a CD it is spinning at a rate of 525 rpm
(revolutions...
asked 2 hours ago -
4. Without doing any calculations, predict whether the observed
∆T would increase, decrease or remain the...
asked 3 hours ago -
Based on the range, which of the following sets of scores has
the greatest variability? 3,...
asked 4 hours ago -
Ripples in a pond travel at a velocity of 3 m/s with one peak
passing a...
asked 4 hours ago -
A man stands on the roof of a building of height 13.0 mm and
throws a...
asked 4 hours ago -
The extent to which assets are financed by borrowed funds and
other liabilities is indicated by:...
asked 5 hours ago -
Explain in detail
Germany is the fifth largest economy
explain what goods and services Germany specializes...
asked 5 hours ago -
The density of platinum is 21.45 g/mL. If a cube of platinum
with a mass of...
asked 5 hours ago -
Accounts Receivable
Sales
A/R Posting
Extended Sales Invoice
Packing Slip
Compare invoice to packing slip 2...
asked 5 hours ago -
Michaella, age 23, is a full-time law student and is claimed by
her parents as a...
asked 5 hours ago -
Why are polymers not typically casted into products?
asked 6 hours ago