

Homework Answers


Add Answer to:
(b) The unity feedback system is given as in Figure Q3 (b). (i) Determine the closed...
1. Consider the unity feedback system shown in figure 1 with G(S) -2sti a) Determine the...
 1. Consider the unity feedback system shown in figure 1 with G(S) -2sti a) Determine the closed loop transfer function TF(s) γ(s) R(s) What are the poles and zeros of TF1(s)? [2 marks] b) For TF(s), calculate the DC gain, natural frequency and damping ratio. Classify TF1(s) as underdamped overdamped, critically damped or undamped [3 marks] c) Use the initial value theorem and final value theorem to determine the initial value (Mo) and final value (M) of the [2 marks]...
1. Consider the unity feedback system shown in figure 1 with G(S) -2sti a) Determine the closed loop transfer function TF(s) γ(s) R(s) What are the poles and zeros of TF1(s)? [2 marks] b) For TF(s), calculate the DC gain, natural frequency and damping ratio. Classify TF1(s) as underdamped overdamped, critically damped or undamped [3 marks] c) Use the initial value theorem and final value theorem to determine the initial value (Mo) and final value (M) of the [2 marks]...
A unity feedback system with the forward transfer function G)2)(s +5) is operating with a closed-...
 A unity feedback system with the forward transfer function G)2)(s +5) is operating with a closed-loop step response that has 15% overshoot. Do the following: a) Evaluate the settling time for a unit step input; b) Design a PD control to yield a 15% overshoot but with a threefold reduction in settling time; c) Evaluate the settling time, overshoot, and steady-state error with the PD control.
A unity feedback system with the forward transfer function G)2)(s +5) is operating with...
A unity feedback system with the forward transfer function G)2)(s +5) is operating with a closed-loop step response that has 15% overshoot. Do the following: a) Evaluate the settling time for a unit step input; b) Design a PD control to yield a 15% overshoot but with a threefold reduction in settling time; c) Evaluate the settling time, overshoot, and steady-state error with the PD control.
A unity feedback system with the forward transfer function G)2)(s +5) is operating with...
4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer f...
 4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
Question 2 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise...
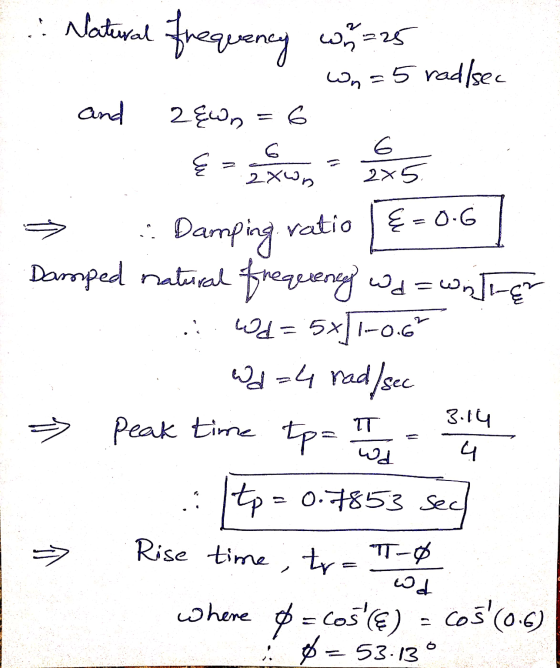
 Question 2 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2b). i Determine the value in so that the damping ratio of the system is 0.5. (1 % marks) From the result obtained in , evaluate the transient response characteristics (rise...
Question 2 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2b). i Determine the value in so that the damping ratio of the system is 0.5. (1 % marks) From the result obtained in , evaluate the transient response characteristics (rise...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%....
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Question 2 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise...
 Question 2 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2(b). i Determine the value Kso that the damping ratio of the system is 0.5. (1 % marks) i. From the result obtained in (), evaluate the transient response characteristics (rise...
Question 2 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2(b). i Determine the value Kso that the damping ratio of the system is 0.5. (1 % marks) i. From the result obtained in (), evaluate the transient response characteristics (rise...
Problem 1. A unity feedback system with forward transfer function G(s) is operating with a closed...
 Problem 1. A unity feedback system with forward transfer function G(s) is operating with a closed-loop step response that has 20.5% overshoot. G)-(+8)6 + 25) G(s) (a) Design a PD compens ator to decrease the settling time of the closed-loop system by a factor of four
Problem 1. A unity feedback system with forward transfer function G(s) is operating with a closed-loop step response that has 20.5% overshoot. G)-(+8)6 + 25) G(s) (a) Design a PD compens ator to decrease...
Problem 1. A unity feedback system with forward transfer function G(s) is operating with a closed-loop step response that has 20.5% overshoot. G)-(+8)6 + 25) G(s) (a) Design a PD compens ator to decrease the settling time of the closed-loop system by a factor of four
Problem 1. A unity feedback system with forward transfer function G(s) is operating with a closed-loop step response that has 20.5% overshoot. G)-(+8)6 + 25) G(s) (a) Design a PD compens ator to decrease...
. a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time,...
 .
a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2(b). i. Determine the value Kn so that the damping ratio of the system is 0.5. (1 % marks) ii. From the result obtained in (), evaluate the transient response characteristics (rise...
.
a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2(b). i. Determine the value Kn so that the damping ratio of the system is 0.5. (1 % marks) ii. From the result obtained in (), evaluate the transient response characteristics (rise...
Nip rolls Bridle Surface winder Center-driven feedback Figure 5 Question 2 (20 marks) The feed forward transfer functio...
 Nip rolls Bridle Surface winder Center-driven feedback Figure 5 Question 2 (20 marks) The feed forward transfer function of an automated manufacturing process is given by K(s + 3) where K is the proportional controller gain. The root locus is shown in Figure 6 a) Determine the range of values of K for which the closed loop system will exhibit an (10 marks) oscillatory response. b) Determine a value of K that gives a damping ratio,-0.707 and a settling time,...
Nip rolls Bridle Surface winder Center-driven feedback Figure 5 Question 2 (20 marks) The feed forward transfer function of an automated manufacturing process is given by K(s + 3) where K is the proportional controller gain. The root locus is shown in Figure 6 a) Determine the range of values of K for which the closed loop system will exhibit an (10 marks) oscillatory response. b) Determine a value of K that gives a damping ratio,-0.707 and a settling time,...
a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak...
 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2(b). i Determine the value K, so that the damping ratio of the system is 0.5. (1 % marks) ii. From the result obtained in (), evaluate the transient response characteristics (rise time,...
a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2(b). i Determine the value K, so that the damping ratio of the system is 0.5. (1 % marks) ii. From the result obtained in (), evaluate the transient response characteristics (rise time,...
 1. Consider the unity feedback system shown in figure 1 with G(S) -2sti a) Determine the closed loop transfer function TF(s) γ(s) R(s) What are the poles and zeros of TF1(s)? [2 marks] b) For TF(s), calculate the DC gain, natural frequency and damping ratio. Classify TF1(s) as underdamped overdamped, critically damped or undamped [3 marks] c) Use the initial value theorem and final value theorem to determine the initial value (Mo) and final value (M) of the [2 marks]...
1. Consider the unity feedback system shown in figure 1 with G(S) -2sti a) Determine the closed loop transfer function TF(s) γ(s) R(s) What are the poles and zeros of TF1(s)? [2 marks] b) For TF(s), calculate the DC gain, natural frequency and damping ratio. Classify TF1(s) as underdamped overdamped, critically damped or undamped [3 marks] c) Use the initial value theorem and final value theorem to determine the initial value (Mo) and final value (M) of the [2 marks]...
 A unity feedback system with the forward transfer function G)2)(s +5) is operating with a closed-loop step response that has 15% overshoot. Do the following: a) Evaluate the settling time for a unit step input; b) Design a PD control to yield a 15% overshoot but with a threefold reduction in settling time; c) Evaluate the settling time, overshoot, and steady-state error with the PD control.
A unity feedback system with the forward transfer function G)2)(s +5) is operating with...
A unity feedback system with the forward transfer function G)2)(s +5) is operating with a closed-loop step response that has 15% overshoot. Do the following: a) Evaluate the settling time for a unit step input; b) Design a PD control to yield a 15% overshoot but with a threefold reduction in settling time; c) Evaluate the settling time, overshoot, and steady-state error with the PD control.
A unity feedback system with the forward transfer function G)2)(s +5) is operating with...
 4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
 Question 2 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2b). i Determine the value in so that the damping ratio of the system is 0.5. (1 % marks) From the result obtained in , evaluate the transient response characteristics (rise...
Question 2 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2b). i Determine the value in so that the damping ratio of the system is 0.5. (1 % marks) From the result obtained in , evaluate the transient response characteristics (rise...
 Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
Q3. Consider a single loop unity feedback control system of the open loop transfer function (a) Find the range of values of the gain K and the parameter p so that: (i) The overshoot is less than 10%. (ii)The settling time is less than 4 seconds Note: , 4.6 M. = exp CO 40% (b)What are the three elements in a PID controller? Considering each in turn, explain the main ways in which varying the parameters affects the closed-loop system...
 Question 2 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2(b). i Determine the value Kso that the damping ratio of the system is 0.5. (1 % marks) i. From the result obtained in (), evaluate the transient response characteristics (rise...
Question 2 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2(b). i Determine the value Kso that the damping ratio of the system is 0.5. (1 % marks) i. From the result obtained in (), evaluate the transient response characteristics (rise...
 Problem 1. A unity feedback system with forward transfer function G(s) is operating with a closed-loop step response that has 20.5% overshoot. G)-(+8)6 + 25) G(s) (a) Design a PD compens ator to decrease the settling time of the closed-loop system by a factor of four
Problem 1. A unity feedback system with forward transfer function G(s) is operating with a closed-loop step response that has 20.5% overshoot. G)-(+8)6 + 25) G(s) (a) Design a PD compens ator to decrease...
Problem 1. A unity feedback system with forward transfer function G(s) is operating with a closed-loop step response that has 20.5% overshoot. G)-(+8)6 + 25) G(s) (a) Design a PD compens ator to decrease the settling time of the closed-loop system by a factor of four
Problem 1. A unity feedback system with forward transfer function G(s) is operating with a closed-loop step response that has 20.5% overshoot. G)-(+8)6 + 25) G(s) (a) Design a PD compens ator to decrease...
 .
a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2(b). i. Determine the value Kn so that the damping ratio of the system is 0.5. (1 % marks) ii. From the result obtained in (), evaluate the transient response characteristics (rise...
.
a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2(b). i. Determine the value Kn so that the damping ratio of the system is 0.5. (1 % marks) ii. From the result obtained in (), evaluate the transient response characteristics (rise...
 Nip rolls Bridle Surface winder Center-driven feedback Figure 5 Question 2 (20 marks) The feed forward transfer function of an automated manufacturing process is given by K(s + 3) where K is the proportional controller gain. The root locus is shown in Figure 6 a) Determine the range of values of K for which the closed loop system will exhibit an (10 marks) oscillatory response. b) Determine a value of K that gives a damping ratio,-0.707 and a settling time,...
Nip rolls Bridle Surface winder Center-driven feedback Figure 5 Question 2 (20 marks) The feed forward transfer function of an automated manufacturing process is given by K(s + 3) where K is the proportional controller gain. The root locus is shown in Figure 6 a) Determine the range of values of K for which the closed loop system will exhibit an (10 marks) oscillatory response. b) Determine a value of K that gives a damping ratio,-0.707 and a settling time,...
 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2(b). i Determine the value K, so that the damping ratio of the system is 0.5. (1 % marks) ii. From the result obtained in (), evaluate the transient response characteristics (rise time,...
a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2(b). i Determine the value K, so that the damping ratio of the system is 0.5. (1 % marks) ii. From the result obtained in (), evaluate the transient response characteristics (rise time,...
Most questions answered within 3 hours.
-
Hey im just confused about how to put the ' A angle n' and ' S...
asked 8 minutes ago -
Define Diet counceling? What are the
responsibilities of a counselor?
asked 8 minutes ago -
A short essay about the WSJ article on Oreo versus Hydrox.
asked 10 minutes ago -
##8. A program contains the following function definition:
##def cube(num):
##return num * num * num...
asked 17 minutes ago -
find the value z of a standard Normal variable that satisfies
each of the given conditions....
asked 40 minutes ago -
"banana".find('z')
Out[22]: -1
why is this -1
python 3.7
asked 21 minutes ago -
Ilegal Consideration Marna Balin was involved in two automobile
accidents in which she suffered severe injures.She...
asked 30 minutes ago -
Walk through the operation of QuickSort when n = 7 and the input
array is A...
asked 24 minutes ago -
Answer with True or False. Argue the answers
7) The circulation of field B on any...
asked 32 minutes ago -
Chase Co. uses the perpetual inventory method. The inventory
records for Chase reflected the following
Jan...
asked 31 minutes ago -
what are is the correct compression for these two ipv6 ips.. i
keep getting them wrong...
asked 36 minutes ago -
How does the amount of silica gel used change separation?
asked 37 minutes ago