
Homework Answers
![:.yloj=apla) + upla-2) (2) Zht z]dt = (zazn+3) (Z]d = (7)CH (zid = r27 Numerator . ..plus=sclo) + spla-o) - 6 ploeas Inverse](http://img.homeworklib.com/questions/0f420e60-14b3-11ec-9215-a985ebbf3597.png?x-oss-process=image/resize,w_560)
![Direct Form IT - - Realization. - ocen) pln) 2ply yla) 14pl 4-2) 1 splny 21] La pisos placuje La](http://img.homeworklib.com/questions/0fe98240-14b3-11ec-981d-51f3325f4b74.png?x-oss-process=image/resize,w_560)

Add Answer to:
Problem 5: (20=10+5+5 points) Consider a causal system with the following transfer function (the z-transform) 2...
Problem #1. Topics: Z Transform Find the Z transform of: x[n]=-(0.9 )n-2u-n+5] X(Z) Problem #2. T...
 Problem #1. Topics: Z Transform Find the Z transform of: x[n]=-(0.9 )n-2u-n+5] X(Z) Problem #2. Topics: Filter Design, Effective Time Constant Design a causal 2nd order, normalized, stable Peak Filter centered at fo 1000Hz. Use only two conjugate poles and two zeros at the origin. The system is to be sampled at Fs- 8000Hz. The duration of the transient should be as close as possible to teft 7.5 ms. The transient is assumed to end when the largest pole elevated...
Problem #1. Topics: Z Transform Find the Z transform of: x[n]=-(0.9 )n-2u-n+5] X(Z) Problem #2. Topics: Filter Design, Effective Time Constant Design a causal 2nd order, normalized, stable Peak Filter centered at fo 1000Hz. Use only two conjugate poles and two zeros at the origin. The system is to be sampled at Fs- 8000Hz. The duration of the transient should be as close as possible to teft 7.5 ms. The transient is assumed to end when the largest pole elevated...
7. A causal LTI system has a transfer function given by H (z) = -1 (1...
 7. A causal LTI system has a transfer function given by H (z) = -1 (1 4 The input to the system is x[n] = (0.5)"u[n] + u[-n-1] ) Find the impulse response of the system b) Determine the difference equation that describes the system. c) Find the output y[n]. d) Is the system stable?
7. A causal LTI system has a transfer function given by H (z) = -1 (1 4 The input to the system is x[n] = (0.5)"u[n] + u[-n-1] ) Find the impulse response of the system b) Determine the difference equation that describes the system. c) Find the output y[n]. d) Is the system stable?
Use the Z-transform to find the general solution (zero-input and zero-state) for the following linear recursive...
 Use the Z-transform to find the general solution (zero-input and zero-state) for the following linear recursive difference equation written in advanced form: y[n+2] +3y[n+1]+2y[n] = 2x[n+2] A. Use the Z-transform to find the zero-input solution with initial conditions: y[-2]=2, and y(-1)=3 B. Use the Z-transform to find the zero-state solution if the source function is given by, x[n]=3" u[n] C. Write the general solution to the linear recursive difference equation D. Use the Z-transform to find the transfer function (H(z))...
Use the Z-transform to find the general solution (zero-input and zero-state) for the following linear recursive difference equation written in advanced form: y[n+2] +3y[n+1]+2y[n] = 2x[n+2] A. Use the Z-transform to find the zero-input solution with initial conditions: y[-2]=2, and y(-1)=3 B. Use the Z-transform to find the zero-state solution if the source function is given by, x[n]=3" u[n] C. Write the general solution to the linear recursive difference equation D. Use the Z-transform to find the transfer function (H(z))...
A causal,d following difference equation linear, time-invariant system is governed by the (a) Determine the transfer...
 A causal,d following difference equation linear, time-invariant system is governed by the (a) Determine the transfer function, H(2), of the system and its region of (b) Determine the output yi[n] of the system in response to the input (c) Determine the output y2fn] of the system in response to the input convergence. r2n (2). Note that z2n] does not have a z-transform.
A causal,d following difference equation linear, time-invariant system is governed by the (a) Determine the transfer function, H(2), of the system and its region of (b) Determine the output yi[n] of the system in response to the input (c) Determine the output y2fn] of the system in response to the input convergence. r2n (2). Note that z2n] does not have a z-transform.
2-If X1(z)Find the Z-Transform of X2[x]-X, ln +3]u[n] Find theZ-Transform of X211 ( I-hind the ...
 2-If X1(z)Find the Z-Transform of X2[x]-X, ln +3]u[n] Find theZ-Transform of X211 ( I-hind the Inverse Z-transform of given function. a) R(Z) =- (1-e") (-(z-e-ar) 3 +282+8-1 b) F (Z) = (2-2)2(2+2) Find the Z-Transform of X2 [x] = X1 [n + 3] u [n] 3- Solve the difference equation 3 4 With initial conditions y-1] 1 and yl-2] 3 4- Let the step response of a linear, time-invariant, causal system be 72 3) ulnl 15 3 a) Find the...
2-If X1(z)Find the Z-Transform of X2[x]-X, ln +3]u[n] Find theZ-Transform of X211 ( I-hind the Inverse Z-transform of given function. a) R(Z) =- (1-e") (-(z-e-ar) 3 +282+8-1 b) F (Z) = (2-2)2(2+2) Find the Z-Transform of X2 [x] = X1 [n + 3] u [n] 3- Solve the difference equation 3 4 With initial conditions y-1] 1 and yl-2] 3 4- Let the step response of a linear, time-invariant, causal system be 72 3) ulnl 15 3 a) Find the...
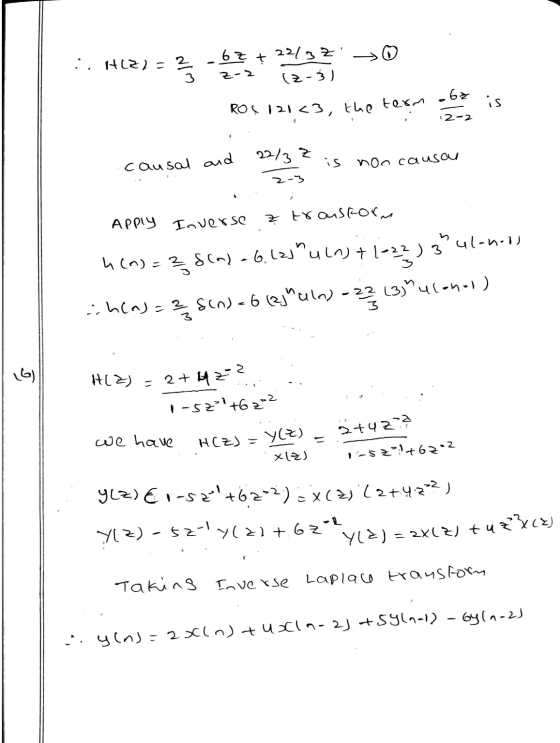
Consider the Z-Transform: H(z)= 2-2) a. Find the difference equation for this H() b. Find and...
 Consider the Z-Transform: H(z)= 2-2) a. Find the difference equation for this H() b. Find and sketch the Inverse Z-Transform h(n) for (i) causal andii) mixed cases. Specify which case of ROC corresponds to a stable system.
Consider the Z-Transform: H(z)= 2-2) a. Find the difference equation for this H() b. Find and sketch the Inverse Z-Transform h(n) for (i) causal andii) mixed cases. Specify which case of ROC corresponds to a stable system.
(2) (10 points) Consider a causal LTI system which its zero-pole plot of H(z) is shown...
 (2) (10 points) Consider a causal LTI system which its zero-pole plot of H(z) is shown in Fig. 1 2. Suppose it is known that lim h[n]= 1) Determine the h[n] of the system. 2) Determine the difference equation of this system. jim (z) 3) Draw the the Block Diagram of this system. -1/3 Re (z) 2 Fig. 2
(2) (10 points) Consider a causal LTI system which its zero-pole plot of H(z) is shown in Fig. 1 2. Suppose it is known that lim h[n]= 1) Determine the h[n] of the system. 2) Determine the difference equation of this system. jim (z) 3) Draw the the Block Diagram of this system. -1/3 Re (z) 2 Fig. 2
4. Block Diagrams (a) Consider a causal LTI system with transfer function Show the direct-form block diagram of Hi(s) b) Consider a causal LTI system with transfer function H282+4s -6 H (s) = 2 Show...
 4. Block Diagrams (a) Consider a causal LTI system with transfer function Show the direct-form block diagram of Hi(s) b) Consider a causal LTI system with transfer function H282+4s -6 H (s) = 2 Show the direct-form block diagram of Hi(s) (c) Now observe that to draw a block diagram as a cascaded combination of two 1st order subsystems. (d) Finally, use partial fraction expansion to express this system as a sum of individual poles and observe that you can...
4. Block Diagrams (a) Consider a causal LTI system with transfer function Show the direct-form block diagram of Hi(s) b) Consider a causal LTI system with transfer function H282+4s -6 H (s) = 2 Show the direct-form block diagram of Hi(s) (c) Now observe that to draw a block diagram as a cascaded combination of two 1st order subsystems. (d) Finally, use partial fraction expansion to express this system as a sum of individual poles and observe that you can...
For a causal LTI discrete-time system described by the difference equation:
For a causal LTI discrete-time system described by the difference equation: y[n] + y[n – 1] = x[n] a) Find the transfer function H(z).b) Find poles and zeros and then mark them on the z-plane (pole-zero plot). Is this system BIBO? c) Find its impulse response h[n]. d) Draw the z-domain block diagram (using the unit delay block z-1) of the discrete-time system. e) Find the output y[n] for input x[n] = 10 u[n] if all initial conditions are 0.
Question 1 Given a causal LTI system y[k] 0.5yk 1]f[k], with f[k] as input and y[k]...
 Question 1 Given a causal LTI system y[k] 0.5yk 1]f[k], with f[k] as input and y[k] as the output. (1) Find the transfer function H(z) and specify its ROC (2) Assume that f[k] -(H u[k] is the input to the LTI system. Use the Z transform's time- convolution property and the inverse Z transform to find the output y[k
Question 1 Given a causal LTI system y[k] 0.5yk 1]f[k], with f[k] as input and y[k] as the output. (1) Find the transfer function H(z) and specify its ROC (2) Assume that f[k] -(H u[k] is the input to the LTI system. Use the Z transform's time- convolution property and the inverse Z transform to find the output y[k
 Problem #1. Topics: Z Transform Find the Z transform of: x[n]=-(0.9 )n-2u-n+5] X(Z) Problem #2. Topics: Filter Design, Effective Time Constant Design a causal 2nd order, normalized, stable Peak Filter centered at fo 1000Hz. Use only two conjugate poles and two zeros at the origin. The system is to be sampled at Fs- 8000Hz. The duration of the transient should be as close as possible to teft 7.5 ms. The transient is assumed to end when the largest pole elevated...
Problem #1. Topics: Z Transform Find the Z transform of: x[n]=-(0.9 )n-2u-n+5] X(Z) Problem #2. Topics: Filter Design, Effective Time Constant Design a causal 2nd order, normalized, stable Peak Filter centered at fo 1000Hz. Use only two conjugate poles and two zeros at the origin. The system is to be sampled at Fs- 8000Hz. The duration of the transient should be as close as possible to teft 7.5 ms. The transient is assumed to end when the largest pole elevated...
 7. A causal LTI system has a transfer function given by H (z) = -1 (1 4 The input to the system is x[n] = (0.5)"u[n] + u[-n-1] ) Find the impulse response of the system b) Determine the difference equation that describes the system. c) Find the output y[n]. d) Is the system stable?
7. A causal LTI system has a transfer function given by H (z) = -1 (1 4 The input to the system is x[n] = (0.5)"u[n] + u[-n-1] ) Find the impulse response of the system b) Determine the difference equation that describes the system. c) Find the output y[n]. d) Is the system stable?
 Use the Z-transform to find the general solution (zero-input and zero-state) for the following linear recursive difference equation written in advanced form: y[n+2] +3y[n+1]+2y[n] = 2x[n+2] A. Use the Z-transform to find the zero-input solution with initial conditions: y[-2]=2, and y(-1)=3 B. Use the Z-transform to find the zero-state solution if the source function is given by, x[n]=3" u[n] C. Write the general solution to the linear recursive difference equation D. Use the Z-transform to find the transfer function (H(z))...
Use the Z-transform to find the general solution (zero-input and zero-state) for the following linear recursive difference equation written in advanced form: y[n+2] +3y[n+1]+2y[n] = 2x[n+2] A. Use the Z-transform to find the zero-input solution with initial conditions: y[-2]=2, and y(-1)=3 B. Use the Z-transform to find the zero-state solution if the source function is given by, x[n]=3" u[n] C. Write the general solution to the linear recursive difference equation D. Use the Z-transform to find the transfer function (H(z))...
 A causal,d following difference equation linear, time-invariant system is governed by the (a) Determine the transfer function, H(2), of the system and its region of (b) Determine the output yi[n] of the system in response to the input (c) Determine the output y2fn] of the system in response to the input convergence. r2n (2). Note that z2n] does not have a z-transform.
A causal,d following difference equation linear, time-invariant system is governed by the (a) Determine the transfer function, H(2), of the system and its region of (b) Determine the output yi[n] of the system in response to the input (c) Determine the output y2fn] of the system in response to the input convergence. r2n (2). Note that z2n] does not have a z-transform.
 2-If X1(z)Find the Z-Transform of X2[x]-X, ln +3]u[n] Find theZ-Transform of X211 ( I-hind the Inverse Z-transform of given function. a) R(Z) =- (1-e") (-(z-e-ar) 3 +282+8-1 b) F (Z) = (2-2)2(2+2) Find the Z-Transform of X2 [x] = X1 [n + 3] u [n] 3- Solve the difference equation 3 4 With initial conditions y-1] 1 and yl-2] 3 4- Let the step response of a linear, time-invariant, causal system be 72 3) ulnl 15 3 a) Find the...
2-If X1(z)Find the Z-Transform of X2[x]-X, ln +3]u[n] Find theZ-Transform of X211 ( I-hind the Inverse Z-transform of given function. a) R(Z) =- (1-e") (-(z-e-ar) 3 +282+8-1 b) F (Z) = (2-2)2(2+2) Find the Z-Transform of X2 [x] = X1 [n + 3] u [n] 3- Solve the difference equation 3 4 With initial conditions y-1] 1 and yl-2] 3 4- Let the step response of a linear, time-invariant, causal system be 72 3) ulnl 15 3 a) Find the...
 Consider the Z-Transform: H(z)= 2-2) a. Find the difference equation for this H() b. Find and sketch the Inverse Z-Transform h(n) for (i) causal andii) mixed cases. Specify which case of ROC corresponds to a stable system.
Consider the Z-Transform: H(z)= 2-2) a. Find the difference equation for this H() b. Find and sketch the Inverse Z-Transform h(n) for (i) causal andii) mixed cases. Specify which case of ROC corresponds to a stable system.
 (2) (10 points) Consider a causal LTI system which its zero-pole plot of H(z) is shown in Fig. 1 2. Suppose it is known that lim h[n]= 1) Determine the h[n] of the system. 2) Determine the difference equation of this system. jim (z) 3) Draw the the Block Diagram of this system. -1/3 Re (z) 2 Fig. 2
(2) (10 points) Consider a causal LTI system which its zero-pole plot of H(z) is shown in Fig. 1 2. Suppose it is known that lim h[n]= 1) Determine the h[n] of the system. 2) Determine the difference equation of this system. jim (z) 3) Draw the the Block Diagram of this system. -1/3 Re (z) 2 Fig. 2
 4. Block Diagrams (a) Consider a causal LTI system with transfer function Show the direct-form block diagram of Hi(s) b) Consider a causal LTI system with transfer function H282+4s -6 H (s) = 2 Show the direct-form block diagram of Hi(s) (c) Now observe that to draw a block diagram as a cascaded combination of two 1st order subsystems. (d) Finally, use partial fraction expansion to express this system as a sum of individual poles and observe that you can...
4. Block Diagrams (a) Consider a causal LTI system with transfer function Show the direct-form block diagram of Hi(s) b) Consider a causal LTI system with transfer function H282+4s -6 H (s) = 2 Show the direct-form block diagram of Hi(s) (c) Now observe that to draw a block diagram as a cascaded combination of two 1st order subsystems. (d) Finally, use partial fraction expansion to express this system as a sum of individual poles and observe that you can...
 Question 1 Given a causal LTI system y[k] 0.5yk 1]f[k], with f[k] as input and y[k] as the output. (1) Find the transfer function H(z) and specify its ROC (2) Assume that f[k] -(H u[k] is the input to the LTI system. Use the Z transform's time- convolution property and the inverse Z transform to find the output y[k
Question 1 Given a causal LTI system y[k] 0.5yk 1]f[k], with f[k] as input and y[k] as the output. (1) Find the transfer function H(z) and specify its ROC (2) Assume that f[k] -(H u[k] is the input to the LTI system. Use the Z transform's time- convolution property and the inverse Z transform to find the output y[k
Most questions answered within 3 hours.
-
MATLAB HW 11 problem using Switch Case and Input commands
Write a script file that calculates...
asked 13 minutes ago -
A college student is employed as a door-to-door newspaper
salesman. Historical data suggests that the student...
asked 27 minutes ago -
Considering gravitational time dilation, calculate the time that
passes in Earth’s surface while 1 hour passes...
asked 51 minutes ago -
Minitab Problem: Take the Lake Hume June rainfall data and find
use the processes outlined in...
asked 1 hour ago -
X Company is trying to decide whether to continue using old
equipment to make Product A...
asked 1 hour ago -
IN PYTHON ONLY !! Program 2: Re-work
program #5 (WeeklyHours) from the previous assignment such that...
asked 2 hours ago -
The average length of time between arrivals at a turnpike
toll-booth is 26 seconds. What is...
asked 4 hours ago -
(a) A piston at 6.1 atm contains a gas that occupies a volume of
3.5 L....
asked 5 hours ago -
Please answer true or false. Words
cannot be changed or added in to make it true...
asked 5 hours ago -
An empty test tube weighs 15.923 grams. Then,
MgCl2•6H2O is added into the test tube. After...
asked 5 hours ago -
Assume memory access is 10 units of time and disk access is
10000 units of time....
asked 5 hours ago -
1. Are all good samples random?
2. Magazines often report surveys giving statistics such as “63%...
asked 5 hours ago