sketch the general shape of the loci for the following systems with the following loop gain...
sketch the general shape of the loci for the following systems with the following loop gain functions.
a) k/s(s+2)
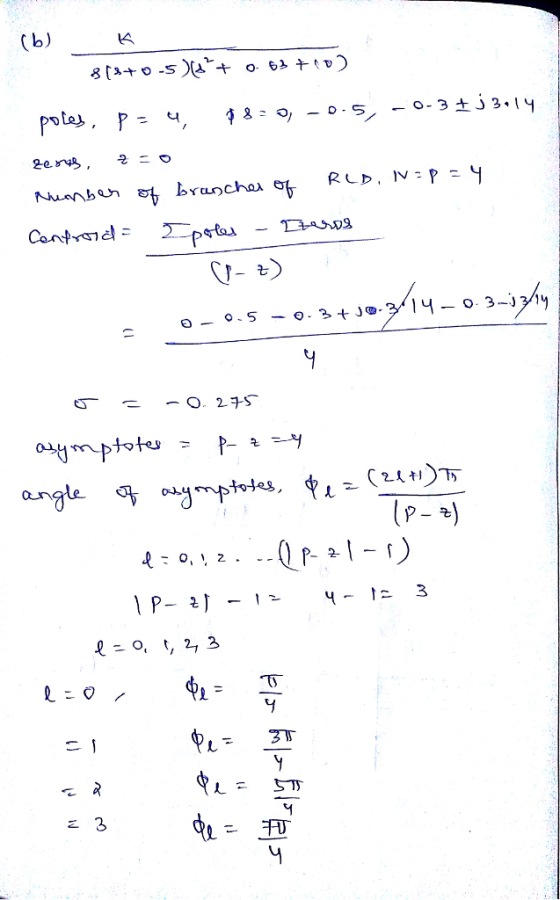
b) k/s(s+0,5)(s^2+0.6s+10)
c) k(s+a)/s^2(s+b)
b>a>0
Homework Answers





Add Answer to:
sketch the general shape of the loci for the following systems
with the following loop gain...
Sketch the root loci for a unity control system, whose open-loop transfer function is given by...
 Sketch the root loci for a unity control system, whose open-loop
transfer function is given by
I WILL AWARD POINTS IMMEDIATELY TO THE FIRST PERSON WHO ANSWERS
THIS CORRECTLY AND THOROUGHLY.
Sketch the root loci for a unity control system, whose open-loop transfer function is given by G(s) = K/s(s^2 + 4s + 5)
Sketch the root loci for a unity control system, whose open-loop
transfer function is given by
I WILL AWARD POINTS IMMEDIATELY TO THE FIRST PERSON WHO ANSWERS
THIS CORRECTLY AND THOROUGHLY.
Sketch the root loci for a unity control system, whose open-loop transfer function is given by G(s) = K/s(s^2 + 4s + 5)
2. Sketch the general shape of the root locus for each of the open-loop pole- zero...
 2. Sketch the general shape of the root locus for each of the open-loop pole- zero plots shown in Figure P8.2. [Section: 8.4] s-plane x s-plane 10) jo x S-plane X s-plane
2. Sketch the general shape of the root locus for each of the open-loop pole- zero plots shown in Figure P8.2. [Section: 8.4] s-plane x s-plane 10) jo x S-plane X s-plane
For the following closed-loop transfer functions, sketch the bode plots (magnitude and phase), id...
 For the following closed-loop transfer functions, sketch the bode plots (magnitude and phase), iden- tifying the zero gain, the slopes (in Decibels) and the high-frequency cutt-off rate. Then verify with Matlab C()101 100) s 0.1) (s 10) 100 s(s +10)2 G(s) = (56) G(s) = s+10(s+100)
For the following closed-loop transfer functions, sketch the bode plots (magnitude and phase), iden- tifying the zero gain, the slopes (in Decibels) and the high-frequency cutt-off rate. Then verify with Matlab C()101 100) s...
For the following closed-loop transfer functions, sketch the bode plots (magnitude and phase), iden- tifying the zero gain, the slopes (in Decibels) and the high-frequency cutt-off rate. Then verify with Matlab C()101 100) s 0.1) (s 10) 100 s(s +10)2 G(s) = (56) G(s) = s+10(s+100)
For the following closed-loop transfer functions, sketch the bode plots (magnitude and phase), iden- tifying the zero gain, the slopes (in Decibels) and the high-frequency cutt-off rate. Then verify with Matlab C()101 100) s...
Consider the system with open-loop transfer function s+2 G(s) = k 82 4 Show the type...
 Consider the system with open-loop transfer function s+2 G(s) = k 82 4 Show the type of poles that the close-loop system has (real, imaginary, or repeated) for the different values ofk in [0 +00). Sketch the root locus of the close-loop system's poles when the gain k takes values in [0 +oo). Show clearly the break points of the loci, and calculate analytically the values that the branches of the loci are converging when k o
Consider the system with open-loop transfer function s+2 G(s) = k 82 4 Show the type of poles that the close-loop system has (real, imaginary, or repeated) for the different values ofk in [0 +00). Sketch the root locus of the close-loop system's poles when the gain k takes values in [0 +oo). Show clearly the break points of the loci, and calculate analytically the values that the branches of the loci are converging when k o
Please sketch the Root Loci of the system below and show intermediate steps. Thanks! Problem 2....
 Please sketch the Root Loci of the system below and show
intermediate steps. Thanks!
Problem 2. [5 points] Utilizing the Routh's stability criterion, determine the range of K for stability for the given characteristic equation s+2s3 (4+K)s2 +9s25 0, and verify the analysis by selecting K values for stable and unstable regions, respectively, and by observing time responses with Simulink simulations. Note that the associated open-loop transfer function can be derived such that s +2s3 +4s+925+Ks2-0+K G() 0 where G(5...
Please sketch the Root Loci of the system below and show
intermediate steps. Thanks!
Problem 2. [5 points] Utilizing the Routh's stability criterion, determine the range of K for stability for the given characteristic equation s+2s3 (4+K)s2 +9s25 0, and verify the analysis by selecting K values for stable and unstable regions, respectively, and by observing time responses with Simulink simulations. Note that the associated open-loop transfer function can be derived such that s +2s3 +4s+925+Ks2-0+K G() 0 where G(5...
(30pts) For the pole-zero map of loop transfer functions shown below, roughly sketch the root locus...
 (30pts) For the pole-zero map of loop transfer functions shown below, roughly sketch the root locus aagram. Calculate, if applicable, (i) the center and angles of asymptote, (ii) the arrival and departure angles for complex polesizeros,(ili) the brecak-in and break-away point, and (iv) clearly indicate the loci for positive values of the gain 2. (a) (15pts) 2-P breele per d branches . S.0,-1 ,+1-(52ms+8) mpn2 assympt shotw wan!
(30pts) For the pole-zero map of loop transfer functions shown below, roughly sketch the root locus aagram. Calculate, if applicable, (i) the center and angles of asymptote, (ii) the arrival and departure angles for complex polesizeros,(ili) the brecak-in and break-away point, and (iv) clearly indicate the loci for positive values of the gain 2. (a) (15pts) 2-P breele per d branches . S.0,-1 ,+1-(52ms+8) mpn2 assympt shotw wan!
A unity gain negative feedback system has an open-loop transfer function given by 4. s) =...
 A unity gain negative feedback system has an open-loop transfer function given by 4. s) = s(1 + 10s)(1 + 10s)? Draw a Bode diagram for this system and determine the loop gain K required for a phase margin of 20 deg. What is the gain margin? 5. We are given the closed-loop transfer function 10(s + 1) T(s) = 82+98+10 for a "unity feedback" system and asked to find the open-loop transfer function, generate a log-magnitude-phase plot for both...
A unity gain negative feedback system has an open-loop transfer function given by 4. s) = s(1 + 10s)(1 + 10s)? Draw a Bode diagram for this system and determine the loop gain K required for a phase margin of 20 deg. What is the gain margin? 5. We are given the closed-loop transfer function 10(s + 1) T(s) = 82+98+10 for a "unity feedback" system and asked to find the open-loop transfer function, generate a log-magnitude-phase plot for both...
1 Sketch the root locus for the unity feedback systems that have an open-loop transfer function...
 1 Sketch the root locus for the unity feedback systems that have an open-loop transfer function of: 6. G(S) = k(s? +1) (s - 1)(8 + 2)(8+3)
1 Sketch the root locus for the unity feedback systems that have an open-loop transfer function of: 6. G(S) = k(s? +1) (s - 1)(8 + 2)(8+3)
1. Consider the usual unity-feedback closed-loop control system with a proportional-gain controll...
 1. Consider the usual unity-feedback closed-loop control system with a proportional-gain controller Sketch (by hand) and fully label a Nyquist plot with K-1 for each of the plants listed below.Show all your work. Use the Nyquist plot to determine all values of K for which the closed-loop system is stable. Check your answers using the Routh-Hurwitz Stability Test. [15 marks] (a) P(s)-2 (b) P(s)-1s3 (c) P(s) -4-8 s+2 (s-2) (s+10)
1. Consider the usual unity-feedback closed-loop control system with a...
1. Consider the usual unity-feedback closed-loop control system with a proportional-gain controller Sketch (by hand) and fully label a Nyquist plot with K-1 for each of the plants listed below.Show all your work. Use the Nyquist plot to determine all values of K for which the closed-loop system is stable. Check your answers using the Routh-Hurwitz Stability Test. [15 marks] (a) P(s)-2 (b) P(s)-1s3 (c) P(s) -4-8 s+2 (s-2) (s+10)
1. Consider the usual unity-feedback closed-loop control system with a...
MECH 4310 Systems & Control Spring 2019 t) For the closed-loop system shown in the figure helow, K varies from 0 to to. Lo) has poles and no zero, and all the four poles are on the left hal...
 MECH 4310 Systems & Control Spring 2019 t) For the closed-loop system shown in the figure helow, K varies from 0 to to. Lo) has poles and no zero, and all the four poles are on the left half plane. Consider the root loci of L(s) for K approaching to to: how many branches of the root loci will be in the right half plane? (2 point) And Why? (2 points) R(s)+ Y(s)
MECH 4310 Systems & Control Spring 2019...
MECH 4310 Systems & Control Spring 2019 t) For the closed-loop system shown in the figure helow, K varies from 0 to to. Lo) has poles and no zero, and all the four poles are on the left half plane. Consider the root loci of L(s) for K approaching to to: how many branches of the root loci will be in the right half plane? (2 point) And Why? (2 points) R(s)+ Y(s)
MECH 4310 Systems & Control Spring 2019...
 Sketch the root loci for a unity control system, whose open-loop
transfer function is given by
I WILL AWARD POINTS IMMEDIATELY TO THE FIRST PERSON WHO ANSWERS
THIS CORRECTLY AND THOROUGHLY.
Sketch the root loci for a unity control system, whose open-loop transfer function is given by G(s) = K/s(s^2 + 4s + 5)
Sketch the root loci for a unity control system, whose open-loop
transfer function is given by
I WILL AWARD POINTS IMMEDIATELY TO THE FIRST PERSON WHO ANSWERS
THIS CORRECTLY AND THOROUGHLY.
Sketch the root loci for a unity control system, whose open-loop transfer function is given by G(s) = K/s(s^2 + 4s + 5)
 2. Sketch the general shape of the root locus for each of the open-loop pole- zero plots shown in Figure P8.2. [Section: 8.4] s-plane x s-plane 10) jo x S-plane X s-plane
2. Sketch the general shape of the root locus for each of the open-loop pole- zero plots shown in Figure P8.2. [Section: 8.4] s-plane x s-plane 10) jo x S-plane X s-plane
 For the following closed-loop transfer functions, sketch the bode plots (magnitude and phase), iden- tifying the zero gain, the slopes (in Decibels) and the high-frequency cutt-off rate. Then verify with Matlab C()101 100) s 0.1) (s 10) 100 s(s +10)2 G(s) = (56) G(s) = s+10(s+100)
For the following closed-loop transfer functions, sketch the bode plots (magnitude and phase), iden- tifying the zero gain, the slopes (in Decibels) and the high-frequency cutt-off rate. Then verify with Matlab C()101 100) s...
For the following closed-loop transfer functions, sketch the bode plots (magnitude and phase), iden- tifying the zero gain, the slopes (in Decibels) and the high-frequency cutt-off rate. Then verify with Matlab C()101 100) s 0.1) (s 10) 100 s(s +10)2 G(s) = (56) G(s) = s+10(s+100)
For the following closed-loop transfer functions, sketch the bode plots (magnitude and phase), iden- tifying the zero gain, the slopes (in Decibels) and the high-frequency cutt-off rate. Then verify with Matlab C()101 100) s...
 Consider the system with open-loop transfer function s+2 G(s) = k 82 4 Show the type of poles that the close-loop system has (real, imaginary, or repeated) for the different values ofk in [0 +00). Sketch the root locus of the close-loop system's poles when the gain k takes values in [0 +oo). Show clearly the break points of the loci, and calculate analytically the values that the branches of the loci are converging when k o
Consider the system with open-loop transfer function s+2 G(s) = k 82 4 Show the type of poles that the close-loop system has (real, imaginary, or repeated) for the different values ofk in [0 +00). Sketch the root locus of the close-loop system's poles when the gain k takes values in [0 +oo). Show clearly the break points of the loci, and calculate analytically the values that the branches of the loci are converging when k o
 Please sketch the Root Loci of the system below and show
intermediate steps. Thanks!
Problem 2. [5 points] Utilizing the Routh's stability criterion, determine the range of K for stability for the given characteristic equation s+2s3 (4+K)s2 +9s25 0, and verify the analysis by selecting K values for stable and unstable regions, respectively, and by observing time responses with Simulink simulations. Note that the associated open-loop transfer function can be derived such that s +2s3 +4s+925+Ks2-0+K G() 0 where G(5...
Please sketch the Root Loci of the system below and show
intermediate steps. Thanks!
Problem 2. [5 points] Utilizing the Routh's stability criterion, determine the range of K for stability for the given characteristic equation s+2s3 (4+K)s2 +9s25 0, and verify the analysis by selecting K values for stable and unstable regions, respectively, and by observing time responses with Simulink simulations. Note that the associated open-loop transfer function can be derived such that s +2s3 +4s+925+Ks2-0+K G() 0 where G(5...
 (30pts) For the pole-zero map of loop transfer functions shown below, roughly sketch the root locus aagram. Calculate, if applicable, (i) the center and angles of asymptote, (ii) the arrival and departure angles for complex polesizeros,(ili) the brecak-in and break-away point, and (iv) clearly indicate the loci for positive values of the gain 2. (a) (15pts) 2-P breele per d branches . S.0,-1 ,+1-(52ms+8) mpn2 assympt shotw wan!
(30pts) For the pole-zero map of loop transfer functions shown below, roughly sketch the root locus aagram. Calculate, if applicable, (i) the center and angles of asymptote, (ii) the arrival and departure angles for complex polesizeros,(ili) the brecak-in and break-away point, and (iv) clearly indicate the loci for positive values of the gain 2. (a) (15pts) 2-P breele per d branches . S.0,-1 ,+1-(52ms+8) mpn2 assympt shotw wan!
 A unity gain negative feedback system has an open-loop transfer function given by 4. s) = s(1 + 10s)(1 + 10s)? Draw a Bode diagram for this system and determine the loop gain K required for a phase margin of 20 deg. What is the gain margin? 5. We are given the closed-loop transfer function 10(s + 1) T(s) = 82+98+10 for a "unity feedback" system and asked to find the open-loop transfer function, generate a log-magnitude-phase plot for both...
A unity gain negative feedback system has an open-loop transfer function given by 4. s) = s(1 + 10s)(1 + 10s)? Draw a Bode diagram for this system and determine the loop gain K required for a phase margin of 20 deg. What is the gain margin? 5. We are given the closed-loop transfer function 10(s + 1) T(s) = 82+98+10 for a "unity feedback" system and asked to find the open-loop transfer function, generate a log-magnitude-phase plot for both...
 1 Sketch the root locus for the unity feedback systems that have an open-loop transfer function of: 6. G(S) = k(s? +1) (s - 1)(8 + 2)(8+3)
1 Sketch the root locus for the unity feedback systems that have an open-loop transfer function of: 6. G(S) = k(s? +1) (s - 1)(8 + 2)(8+3)
 1. Consider the usual unity-feedback closed-loop control system with a proportional-gain controller Sketch (by hand) and fully label a Nyquist plot with K-1 for each of the plants listed below.Show all your work. Use the Nyquist plot to determine all values of K for which the closed-loop system is stable. Check your answers using the Routh-Hurwitz Stability Test. [15 marks] (a) P(s)-2 (b) P(s)-1s3 (c) P(s) -4-8 s+2 (s-2) (s+10)
1. Consider the usual unity-feedback closed-loop control system with a...
1. Consider the usual unity-feedback closed-loop control system with a proportional-gain controller Sketch (by hand) and fully label a Nyquist plot with K-1 for each of the plants listed below.Show all your work. Use the Nyquist plot to determine all values of K for which the closed-loop system is stable. Check your answers using the Routh-Hurwitz Stability Test. [15 marks] (a) P(s)-2 (b) P(s)-1s3 (c) P(s) -4-8 s+2 (s-2) (s+10)
1. Consider the usual unity-feedback closed-loop control system with a...
 MECH 4310 Systems & Control Spring 2019 t) For the closed-loop system shown in the figure helow, K varies from 0 to to. Lo) has poles and no zero, and all the four poles are on the left half plane. Consider the root loci of L(s) for K approaching to to: how many branches of the root loci will be in the right half plane? (2 point) And Why? (2 points) R(s)+ Y(s)
MECH 4310 Systems & Control Spring 2019...
MECH 4310 Systems & Control Spring 2019 t) For the closed-loop system shown in the figure helow, K varies from 0 to to. Lo) has poles and no zero, and all the four poles are on the left half plane. Consider the root loci of L(s) for K approaching to to: how many branches of the root loci will be in the right half plane? (2 point) And Why? (2 points) R(s)+ Y(s)
MECH 4310 Systems & Control Spring 2019...
Most questions answered within 3 hours.
-
Your friend tells you that there is a vending machine on campus
that dispenses M&M packs...
asked 8 minutes ago -
What advantages are there to using piperidine rather than
hydroxide as a base?
asked 6 minutes ago -
7. The life of a Freeze Breeze electric fan is normally
distributed with a mean 4...
asked 9 minutes ago -
1. A 751 mL NaCl solution is diluted to a volume of 1.06 L and a...
asked 14 minutes ago -
8
A $20,000 face value STRIPS is currently quoted at 38.642 and
has 8 years to...
asked 14 minutes ago -
The current exchange rate between the Japanese yen and
the US dollar is 120 yen per...
asked 16 minutes ago -
Marla’s Massages and More bought a special massage table two
years ago for $9,300. At the...
asked 24 minutes ago -
Suppose you require a peak output voltage of 15.0 V and have
available an AC source...
asked 24 minutes ago -
We
conduct A study to estimate the mean age of the population of women
at the...
asked 35 minutes ago -
.13 : Assume that we make an enhancement to a computer that
improves some mode of...
asked 37 minutes ago -
4)
Find the tension in an elevator cable if the 1000 kg elevator is
descending with...
asked 43 minutes ago -
A random sample of 51 newborn babies was taken at the Hospital.
The sample mean was...
asked 41 minutes ago