
Homework Answers


Add Answer to:
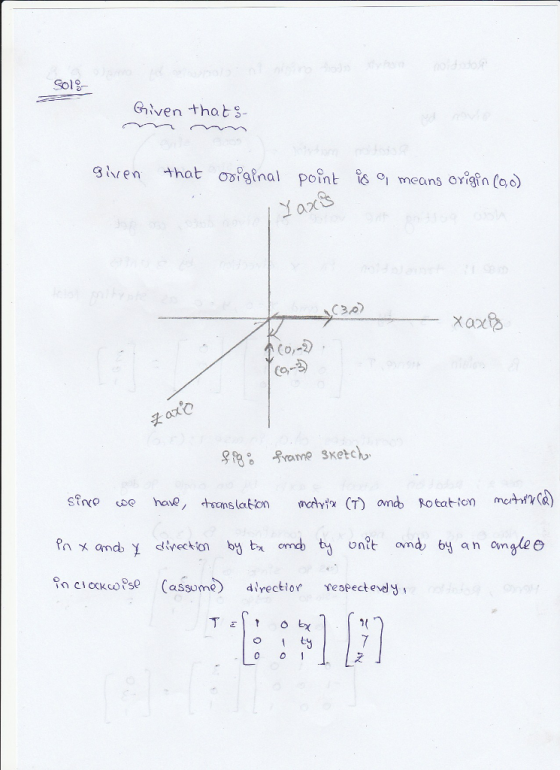
35. Compute the homogeneous transformation representing a translation of 3 units along the r-axis followed by...
Q-8 A frame UB was moved along its own n-axis a distance of 5 units and then rotated about its o-axis an angle of 60, followed by a rotation of about the z-axis; it was then translated about...
 Q-8 A frame UB was moved along its own n-axis a distance of 5 units and then rotated about its o-axis an angle of 60, followed by a rotation of about the z-axis; it was then translated about its a-axis 3 units and finally rotated about x-axis 45° a) Calculate the total transformation performed. b) What angles and movements would we have to make if we were to create the same location and orientation using Cartesian and RPY configurations?
Q-8...
Q-8 A frame UB was moved along its own n-axis a distance of 5 units and then rotated about its o-axis an angle of 60, followed by a rotation of about the z-axis; it was then translated about its a-axis 3 units and finally rotated about x-axis 45° a) Calculate the total transformation performed. b) What angles and movements would we have to make if we were to create the same location and orientation using Cartesian and RPY configurations?
Q-8...
Calculate the concatenated transformation matrix for the following operations performed in the sequence as below: Translation...
Calculate the concatenated transformation matrix for the following operations performed in the sequence as below: Translation by 4 and 5 units along X and Y axis Change of scale by 2 units in X direction and 4 units in Y direction iii Rotation by 60° in CCW direction about Z axis passing through the point (4, 4). Find new coordinates when the transformation is carried out on a triangle ABC with A (4, 4), B (8, 4) and C (6,...
İ need e f and g part thank you for attention Exercise 3.16 In terms of...
 İ need e f and g part thank you for attention
Exercise 3.16 In terms of the Xs, ŷs, Zs coordinates of a fixed space frame {s}, frame {a} has its xg-axis pointing in the direction (0,0,1) and its y -axis pointing in the direction (-1,0,0), and frame {b} has its Xb-axis pointing in the direction (1,0,0) and its ýb-axis pointing in the direction (0,0,-1). The origin of {a} is at (3,0,0) in {s} and the origin of {b} is...
İ need e f and g part thank you for attention
Exercise 3.16 In terms of the Xs, ŷs, Zs coordinates of a fixed space frame {s}, frame {a} has its xg-axis pointing in the direction (0,0,1) and its y -axis pointing in the direction (-1,0,0), and frame {b} has its Xb-axis pointing in the direction (1,0,0) and its ýb-axis pointing in the direction (0,0,-1). The origin of {a} is at (3,0,0) in {s} and the origin of {b} is...
this is a question about 3D transformation , can anyone help me out please The aircraft carrier initially sits at the dock at point D, facing north. It travels 1000 metres north then turns 90° to fac...
 this is a question about 3D transformation , can anyone help me
out please
The aircraft carrier initially sits at the dock at point D, facing north. It travels 1000 metres north then turns 90° to face the east, as shown in Figure 3. 90° 1000m (c) after turning 90 east. Assume a world coordinate frame with D as the origin. The x-axis points west, the y-axis points vertically up and the z-axis points north. One unit- one metre. representing...
this is a question about 3D transformation , can anyone help me
out please
The aircraft carrier initially sits at the dock at point D, facing north. It travels 1000 metres north then turns 90° to face the east, as shown in Figure 3. 90° 1000m (c) after turning 90 east. Assume a world coordinate frame with D as the origin. The x-axis points west, the y-axis points vertically up and the z-axis points north. One unit- one metre. representing...
10. The group of rotation matrices representing rotations about the z axis by an angle a: -sin α ...
 10. The group of rotation matrices representing rotations about the z axis by an angle a: -sin α 0 cos α R,(a)--| sin α cos α 0 can be viewed as a coordinate curve in SO(3). Compute the tangent vector to this curve at the identity. Similarly, find tangent vectors at the identity to the curves representing rotations about the a axis and about the y axis. Is the set of these three tangent vectors a basis for the tangent...
10. The group of rotation matrices representing rotations about the z axis by an angle a: -sin α 0 cos α R,(a)--| sin α cos α 0 can be viewed as a coordinate curve in SO(3). Compute the tangent vector to this curve at the identity. Similarly, find tangent vectors at the identity to the curves representing rotations about the a axis and about the y axis. Is the set of these three tangent vectors a basis for the tangent...
A unit cube as shown in Figure Q1 is undergoing the transformations described in (i) and...
 A unit cube as shown in Figure Q1 is undergoing the transformations described in (i) and (ii) respectively. Sketch the resultant object with coordinates of each vertex after each transformation. (a) Z (0,1,1) (1,1,1) (0,0,1) (1,0,1) (0,0,0) (1,1,0) (1,0,0) Figure Q1 Transformation (i) (6 marks) 1. A Uniform scale by a factor of 2 2. Followed by a rotation about the-axis in counter-clockwise direction by 90 degrees 3. Followed by a transformation moving in the direction of < 2, 1,...
A unit cube as shown in Figure Q1 is undergoing the transformations described in (i) and (ii) respectively. Sketch the resultant object with coordinates of each vertex after each transformation. (a) Z (0,1,1) (1,1,1) (0,0,1) (1,0,1) (0,0,0) (1,1,0) (1,0,0) Figure Q1 Transformation (i) (6 marks) 1. A Uniform scale by a factor of 2 2. Followed by a rotation about the-axis in counter-clockwise direction by 90 degrees 3. Followed by a transformation moving in the direction of < 2, 1,...
5. (3 pts) Any operator that transfors the same way as the position operator r under rotation is ...
 5. (3 pts) Any operator that transfors the same way as the position operator r under rotation is called a vector operator. By "transforming the same way" we mean that V DV where D is the same matrix as appears in Dr. In particular for a rotation about the z axis we should have cos p-sinp0 sincos 0 0 where φ is the angle of rotation. This transformation rule follows frorn the generator of rotations where n is the unit...
5. (3 pts) Any operator that transfors the same way as the position operator r under rotation is called a vector operator. By "transforming the same way" we mean that V DV where D is the same matrix as appears in Dr. In particular for a rotation about the z axis we should have cos p-sinp0 sincos 0 0 where φ is the angle of rotation. This transformation rule follows frorn the generator of rotations where n is the unit...
Problem: Given a rotation R of R3 about an arbitrary axis through a given angle find the matrix w...
 Problem: Given a rotation R of R3 about an arbitrary axis through a given angle find the matrix which represents R with respect to standard coordinates. Here are the details: The axis of rotation is the line L, spanned and oriented by the vector v (1,一1,-1) . Now rotate R3 about L through the angle t = 4 π according to the Right 3 Hand Rule Solution strategy: If we choose a right handed ordered ONB B- (a, b,r) for...
Problem: Given a rotation R of R3 about an arbitrary axis through a given angle find the matrix which represents R with respect to standard coordinates. Here are the details: The axis of rotation is the line L, spanned and oriented by the vector v (1,一1,-1) . Now rotate R3 about L through the angle t = 4 π according to the Right 3 Hand Rule Solution strategy: If we choose a right handed ordered ONB B- (a, b,r) for...
2.1 Summary In this part, you will create a figure, and use linear transformations (matrices) to ...
 2.1 Summary In this part, you will create a figure, and use linear transformations (matrices) to move the figure around the screen. In the end, your figure should move up 8 steps, then turn and face left. Reference material for this part can be found in Linear Algebra, and its applications, David Lay, Section 2.7 starting at the beginning of the section up to, but not incluing,3D Graphics. Also, this poster presentation does a pretty good job explaining the same...
2.1 Summary In this part, you will create a figure, and use linear transformations (matrices) to move the figure around the screen. In the end, your figure should move up 8 steps, then turn and face left. Reference material for this part can be found in Linear Algebra, and its applications, David Lay, Section 2.7 starting at the beginning of the section up to, but not incluing,3D Graphics. Also, this poster presentation does a pretty good job explaining the same...
3. In spherical coordinates the unit vectors r, and ф are given by (a) Compute the...
 3. In spherical coordinates the unit vectors r, and ф are given by (a) Compute the cross products #x f, #x θ, PX φ, θ 0, θ >< φ, and φ >< φ. (b) Express x, y and z in terms of, О and ф. (c) Check the divergence theorern for the function u = r , using for volume the sphere of radius 13] R, centered at the origin, i.e. show that dä -JyV-üö)dr.
3. In spherical coordinates the unit vectors r, and ф are given by (a) Compute the cross products #x f, #x θ, PX φ, θ 0, θ >< φ, and φ >< φ. (b) Express x, y and z in terms of, О and ф. (c) Check the divergence theorern for the function u = r , using for volume the sphere of radius 13] R, centered at the origin, i.e. show that dä -JyV-üö)dr.
 Q-8 A frame UB was moved along its own n-axis a distance of 5 units and then rotated about its o-axis an angle of 60, followed by a rotation of about the z-axis; it was then translated about its a-axis 3 units and finally rotated about x-axis 45° a) Calculate the total transformation performed. b) What angles and movements would we have to make if we were to create the same location and orientation using Cartesian and RPY configurations?
Q-8...
Q-8 A frame UB was moved along its own n-axis a distance of 5 units and then rotated about its o-axis an angle of 60, followed by a rotation of about the z-axis; it was then translated about its a-axis 3 units and finally rotated about x-axis 45° a) Calculate the total transformation performed. b) What angles and movements would we have to make if we were to create the same location and orientation using Cartesian and RPY configurations?
Q-8...
 İ need e f and g part thank you for attention
Exercise 3.16 In terms of the Xs, ŷs, Zs coordinates of a fixed space frame {s}, frame {a} has its xg-axis pointing in the direction (0,0,1) and its y -axis pointing in the direction (-1,0,0), and frame {b} has its Xb-axis pointing in the direction (1,0,0) and its ýb-axis pointing in the direction (0,0,-1). The origin of {a} is at (3,0,0) in {s} and the origin of {b} is...
İ need e f and g part thank you for attention
Exercise 3.16 In terms of the Xs, ŷs, Zs coordinates of a fixed space frame {s}, frame {a} has its xg-axis pointing in the direction (0,0,1) and its y -axis pointing in the direction (-1,0,0), and frame {b} has its Xb-axis pointing in the direction (1,0,0) and its ýb-axis pointing in the direction (0,0,-1). The origin of {a} is at (3,0,0) in {s} and the origin of {b} is...
 this is a question about 3D transformation , can anyone help me
out please
The aircraft carrier initially sits at the dock at point D, facing north. It travels 1000 metres north then turns 90° to face the east, as shown in Figure 3. 90° 1000m (c) after turning 90 east. Assume a world coordinate frame with D as the origin. The x-axis points west, the y-axis points vertically up and the z-axis points north. One unit- one metre. representing...
this is a question about 3D transformation , can anyone help me
out please
The aircraft carrier initially sits at the dock at point D, facing north. It travels 1000 metres north then turns 90° to face the east, as shown in Figure 3. 90° 1000m (c) after turning 90 east. Assume a world coordinate frame with D as the origin. The x-axis points west, the y-axis points vertically up and the z-axis points north. One unit- one metre. representing...
 10. The group of rotation matrices representing rotations about the z axis by an angle a: -sin α 0 cos α R,(a)--| sin α cos α 0 can be viewed as a coordinate curve in SO(3). Compute the tangent vector to this curve at the identity. Similarly, find tangent vectors at the identity to the curves representing rotations about the a axis and about the y axis. Is the set of these three tangent vectors a basis for the tangent...
10. The group of rotation matrices representing rotations about the z axis by an angle a: -sin α 0 cos α R,(a)--| sin α cos α 0 can be viewed as a coordinate curve in SO(3). Compute the tangent vector to this curve at the identity. Similarly, find tangent vectors at the identity to the curves representing rotations about the a axis and about the y axis. Is the set of these three tangent vectors a basis for the tangent...
 A unit cube as shown in Figure Q1 is undergoing the transformations described in (i) and (ii) respectively. Sketch the resultant object with coordinates of each vertex after each transformation. (a) Z (0,1,1) (1,1,1) (0,0,1) (1,0,1) (0,0,0) (1,1,0) (1,0,0) Figure Q1 Transformation (i) (6 marks) 1. A Uniform scale by a factor of 2 2. Followed by a rotation about the-axis in counter-clockwise direction by 90 degrees 3. Followed by a transformation moving in the direction of < 2, 1,...
A unit cube as shown in Figure Q1 is undergoing the transformations described in (i) and (ii) respectively. Sketch the resultant object with coordinates of each vertex after each transformation. (a) Z (0,1,1) (1,1,1) (0,0,1) (1,0,1) (0,0,0) (1,1,0) (1,0,0) Figure Q1 Transformation (i) (6 marks) 1. A Uniform scale by a factor of 2 2. Followed by a rotation about the-axis in counter-clockwise direction by 90 degrees 3. Followed by a transformation moving in the direction of < 2, 1,...
 5. (3 pts) Any operator that transfors the same way as the position operator r under rotation is called a vector operator. By "transforming the same way" we mean that V DV where D is the same matrix as appears in Dr. In particular for a rotation about the z axis we should have cos p-sinp0 sincos 0 0 where φ is the angle of rotation. This transformation rule follows frorn the generator of rotations where n is the unit...
5. (3 pts) Any operator that transfors the same way as the position operator r under rotation is called a vector operator. By "transforming the same way" we mean that V DV where D is the same matrix as appears in Dr. In particular for a rotation about the z axis we should have cos p-sinp0 sincos 0 0 where φ is the angle of rotation. This transformation rule follows frorn the generator of rotations where n is the unit...
 Problem: Given a rotation R of R3 about an arbitrary axis through a given angle find the matrix which represents R with respect to standard coordinates. Here are the details: The axis of rotation is the line L, spanned and oriented by the vector v (1,一1,-1) . Now rotate R3 about L through the angle t = 4 π according to the Right 3 Hand Rule Solution strategy: If we choose a right handed ordered ONB B- (a, b,r) for...
Problem: Given a rotation R of R3 about an arbitrary axis through a given angle find the matrix which represents R with respect to standard coordinates. Here are the details: The axis of rotation is the line L, spanned and oriented by the vector v (1,一1,-1) . Now rotate R3 about L through the angle t = 4 π according to the Right 3 Hand Rule Solution strategy: If we choose a right handed ordered ONB B- (a, b,r) for...
 2.1 Summary In this part, you will create a figure, and use linear transformations (matrices) to move the figure around the screen. In the end, your figure should move up 8 steps, then turn and face left. Reference material for this part can be found in Linear Algebra, and its applications, David Lay, Section 2.7 starting at the beginning of the section up to, but not incluing,3D Graphics. Also, this poster presentation does a pretty good job explaining the same...
2.1 Summary In this part, you will create a figure, and use linear transformations (matrices) to move the figure around the screen. In the end, your figure should move up 8 steps, then turn and face left. Reference material for this part can be found in Linear Algebra, and its applications, David Lay, Section 2.7 starting at the beginning of the section up to, but not incluing,3D Graphics. Also, this poster presentation does a pretty good job explaining the same...
 3. In spherical coordinates the unit vectors r, and ф are given by (a) Compute the cross products #x f, #x θ, PX φ, θ 0, θ >< φ, and φ >< φ. (b) Express x, y and z in terms of, О and ф. (c) Check the divergence theorern for the function u = r , using for volume the sphere of radius 13] R, centered at the origin, i.e. show that dä -JyV-üö)dr.
3. In spherical coordinates the unit vectors r, and ф are given by (a) Compute the cross products #x f, #x θ, PX φ, θ 0, θ >< φ, and φ >< φ. (b) Express x, y and z in terms of, О and ф. (c) Check the divergence theorern for the function u = r , using for volume the sphere of radius 13] R, centered at the origin, i.e. show that dä -JyV-üö)dr.
Most questions answered within 3 hours.
-
Why would natural selection not minimize costs (in the form of
symptoms) of evolved defenses? (choose...
asked 4 minutes ago -
What is true about a critical task?
Latest finish time - latest start time = 0...
asked 7 minutes ago -
A company uses a
process costing system. Its Assembly Department's beginning
inventory consisted of 56,800 units,...
asked 6 minutes ago -
a
sealed glass cylinder contains 325 g of N2 gas at 1.02 atm at 20 c....
asked 11 minutes ago -
The main difference between an equity and a nonequity alliance
is that
A
equity alliances are...
asked 9 minutes ago -
Need help with this, in JAVA, using netbeans. A
complete response will receive a positive comment...
asked 18 minutes ago -
An imprest petty cash fund of $600 was established for minor
disbursements. At the end of...
asked 23 minutes ago -
Sharpe Cutter is a small company that produces specialty knives
for paper cutting machinery. The annual...
asked 27 minutes ago -
Calculating the Ka of a weak acid from
pH:
The pH of a 0.68M solution of...
asked 28 minutes ago -
1.What process is pushing back against gravity in the very
center (the core) of sun-like stars?...
asked 48 minutes ago -
This question is from the textbook "Python for ArcGIS" by Laura
Tateosian:
Write a script "triangles.py"...
asked 46 minutes ago -
Which of the following is an impediment that makes it
difficult for firms to achieve the...
asked 48 minutes ago