
Homework Answers



Add Answer to:
QS. (a) A system has the transfer function 5+1 G(s) s'+33-10s - 24 Use the Routh-Hurwitz...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5...
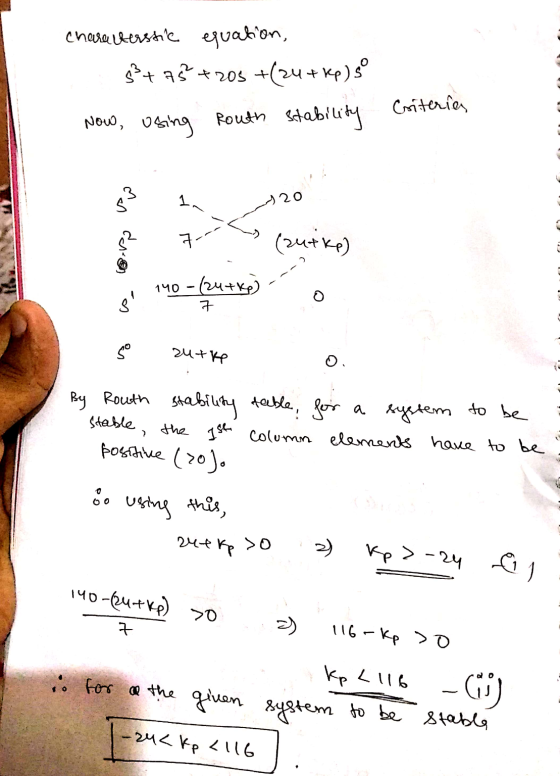
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given...
 3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
Question 2 System Stability in the s-Domain and in the Frequency Domain: Bode Plots, Root Locus...
 Question 2 System Stability in the s-Domain and in the Frequency Domain: Bode Plots, Root Locus Plots and Routh- Hurwitz Criterion ofStability A unit feedback control system is to be stabilized using a Proportional Controller, as shown in Figure Q2.1. Proportional Controller Process The process transfer function is described as follows: Y(s) G(s) s2 +4s 100 s3 +4s2 5s 2 Figure Q2.1 Your task is to investigate the stability of the closed loop system using s-domain analysis by finding: a)...
Question 2 System Stability in the s-Domain and in the Frequency Domain: Bode Plots, Root Locus Plots and Routh- Hurwitz Criterion ofStability A unit feedback control system is to be stabilized using a Proportional Controller, as shown in Figure Q2.1. Proportional Controller Process The process transfer function is described as follows: Y(s) G(s) s2 +4s 100 s3 +4s2 5s 2 Figure Q2.1 Your task is to investigate the stability of the closed loop system using s-domain analysis by finding: a)...
NASC NESSARY & sufficient criterior Use the Routh - Hurwitz technique for the Derive the N.A.S.C....
 NASC
NESSARY & sufficient criterior
Use the Routh - Hurwitz technique for the Derive the N.A.S.C. for a 5th order system with arbitrary coefficients {an.... a3 (n=5). Clearly state the conditions on the a.). - Assess the stability and state the N.A.S.C. for each system in #p6ol, page 405 (also shown on Canvas in Files Homewor. of the text. Note: This problem has parte "a)" through "g). [Routh- Hurwitz is optional for 3.] - For a system given as: y...
NASC
NESSARY & sufficient criterior
Use the Routh - Hurwitz technique for the Derive the N.A.S.C. for a 5th order system with arbitrary coefficients {an.... a3 (n=5). Clearly state the conditions on the a.). - Assess the stability and state the N.A.S.C. for each system in #p6ol, page 405 (also shown on Canvas in Files Homewor. of the text. Note: This problem has parte "a)" through "g). [Routh- Hurwitz is optional for 3.] - For a system given as: y...
1. Consider the usual unity-feedback closed-loop control system with a proportional-gain controll...
 1. Consider the usual unity-feedback closed-loop control system with a proportional-gain controller Sketch (by hand) and fully label a Nyquist plot with K-1 for each of the plants listed below.Show all your work. Use the Nyquist plot to determine all values of K for which the closed-loop system is stable. Check your answers using the Routh-Hurwitz Stability Test. [15 marks] (a) P(s)-2 (b) P(s)-1s3 (c) P(s) -4-8 s+2 (s-2) (s+10)
1. Consider the usual unity-feedback closed-loop control system with a...
1. Consider the usual unity-feedback closed-loop control system with a proportional-gain controller Sketch (by hand) and fully label a Nyquist plot with K-1 for each of the plants listed below.Show all your work. Use the Nyquist plot to determine all values of K for which the closed-loop system is stable. Check your answers using the Routh-Hurwitz Stability Test. [15 marks] (a) P(s)-2 (b) P(s)-1s3 (c) P(s) -4-8 s+2 (s-2) (s+10)
1. Consider the usual unity-feedback closed-loop control system with a...
control systems 1) Using Routh Hurwitz Stability Criteria, determine whether the following system of equation is...
 control systems
1) Using Routh Hurwitz Stability Criteria, determine whether the following system of equation is stable or not. a) S4+253+3S2+45+5=0 2) Using the Routh Hurwitz stability criterion, determine the range of K for stability of the following characteristic equation. a) s4+2s8+(4+K)s2+9s+25=0 3)Sketch the root-locus of the following systems a) G(s)H(s) = s(s+1)(s+2) b) G(s)H(s) = 52(8+3.6) K(5+1)
control systems
1) Using Routh Hurwitz Stability Criteria, determine whether the following system of equation is stable or not. a) S4+253+3S2+45+5=0 2) Using the Routh Hurwitz stability criterion, determine the range of K for stability of the following characteristic equation. a) s4+2s8+(4+K)s2+9s+25=0 3)Sketch the root-locus of the following systems a) G(s)H(s) = s(s+1)(s+2) b) G(s)H(s) = 52(8+3.6) K(5+1)
1. Use the Routh-Hurwitz test to determine if the system described by the following transfer function...
 1. Use the Routh-Hurwitz test to determine if the system described by the following transfer function is stable. If the system is unstable, how many poles are outside the LHP? Use Matlab to check your answers. C() 10-8) R(s) s2 +7s +28 2. Repeat problem 1) above for the system with transfer function C (s) R(5s +Bs+ 40 s2 +2s+4 3. Use the Routh-Hurwitz test to determine if the system described by the following characteristic equation is stable. If the...
1. Use the Routh-Hurwitz test to determine if the system described by the following transfer function is stable. If the system is unstable, how many poles are outside the LHP? Use Matlab to check your answers. C() 10-8) R(s) s2 +7s +28 2. Repeat problem 1) above for the system with transfer function C (s) R(5s +Bs+ 40 s2 +2s+4 3. Use the Routh-Hurwitz test to determine if the system described by the following characteristic equation is stable. If the...
Question 2: By using Routh Hurwitz tabulation method, determine whether the unity feedback system of Figure...
 Question 2: By using Routh Hurwitz tabulation method, determine whether the unity feedback system of Figure 2 is stable if 240 G(s)- R(S) + G(S) Figure 2 a. How many poles are in the right half-plane, left-half in the system? b. Verify the system stability by using vissim simulation
Question 2: By using Routh Hurwitz tabulation method, determine whether the unity feedback system of Figure 2 is stable if 240 G(s)- R(S) + G(S) Figure 2 a. How many poles are in the right half-plane, left-half in the system? b. Verify the system stability by using vissim simulation
4) Using the Routh-Hurwitz Criterion, determine whether the following Polynomials are Stable or Unstable. Please Show...
 4) Using the Routh-Hurwitz Criterion, determine whether the following Polynomials are Stable or Unstable. Please Show Supporting Work: 1) H(s) = s? + 10s + 5 = 0 Stable Unstable 11) H(s) = s4 +53 + 5s2 + 20s + 10 = 0 Stable Unstable 111) H(s) = 83 + 4Ks2 + (5 + K)s + 10 = 0 The Range of K for a Stable System is: a. b. K > 0.46 K< 0.46 0<K <0.46 Unstable for all...
4) Using the Routh-Hurwitz Criterion, determine whether the following Polynomials are Stable or Unstable. Please Show Supporting Work: 1) H(s) = s? + 10s + 5 = 0 Stable Unstable 11) H(s) = s4 +53 + 5s2 + 20s + 10 = 0 Stable Unstable 111) H(s) = 83 + 4Ks2 + (5 + K)s + 10 = 0 The Range of K for a Stable System is: a. b. K > 0.46 K< 0.46 0<K <0.46 Unstable for all...
Consider the system shown in Figure 1. Using the Routh-Hurwitz Criterion, determine the range of K...
 Consider the system shown in Figure 1. Using the Routh-Hurwitz Criterion, determine the range of K for which the system is stable. R(s) Figure 1
Consider the system shown in Figure 1. Using the Routh-Hurwitz Criterion, determine the range of K for which the system is stable. R(s) Figure 1
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
 3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
 Question 2 System Stability in the s-Domain and in the Frequency Domain: Bode Plots, Root Locus Plots and Routh- Hurwitz Criterion ofStability A unit feedback control system is to be stabilized using a Proportional Controller, as shown in Figure Q2.1. Proportional Controller Process The process transfer function is described as follows: Y(s) G(s) s2 +4s 100 s3 +4s2 5s 2 Figure Q2.1 Your task is to investigate the stability of the closed loop system using s-domain analysis by finding: a)...
Question 2 System Stability in the s-Domain and in the Frequency Domain: Bode Plots, Root Locus Plots and Routh- Hurwitz Criterion ofStability A unit feedback control system is to be stabilized using a Proportional Controller, as shown in Figure Q2.1. Proportional Controller Process The process transfer function is described as follows: Y(s) G(s) s2 +4s 100 s3 +4s2 5s 2 Figure Q2.1 Your task is to investigate the stability of the closed loop system using s-domain analysis by finding: a)...
 NASC
NESSARY & sufficient criterior
Use the Routh - Hurwitz technique for the Derive the N.A.S.C. for a 5th order system with arbitrary coefficients {an.... a3 (n=5). Clearly state the conditions on the a.). - Assess the stability and state the N.A.S.C. for each system in #p6ol, page 405 (also shown on Canvas in Files Homewor. of the text. Note: This problem has parte "a)" through "g). [Routh- Hurwitz is optional for 3.] - For a system given as: y...
NASC
NESSARY & sufficient criterior
Use the Routh - Hurwitz technique for the Derive the N.A.S.C. for a 5th order system with arbitrary coefficients {an.... a3 (n=5). Clearly state the conditions on the a.). - Assess the stability and state the N.A.S.C. for each system in #p6ol, page 405 (also shown on Canvas in Files Homewor. of the text. Note: This problem has parte "a)" through "g). [Routh- Hurwitz is optional for 3.] - For a system given as: y...
 1. Consider the usual unity-feedback closed-loop control system with a proportional-gain controller Sketch (by hand) and fully label a Nyquist plot with K-1 for each of the plants listed below.Show all your work. Use the Nyquist plot to determine all values of K for which the closed-loop system is stable. Check your answers using the Routh-Hurwitz Stability Test. [15 marks] (a) P(s)-2 (b) P(s)-1s3 (c) P(s) -4-8 s+2 (s-2) (s+10)
1. Consider the usual unity-feedback closed-loop control system with a...
1. Consider the usual unity-feedback closed-loop control system with a proportional-gain controller Sketch (by hand) and fully label a Nyquist plot with K-1 for each of the plants listed below.Show all your work. Use the Nyquist plot to determine all values of K for which the closed-loop system is stable. Check your answers using the Routh-Hurwitz Stability Test. [15 marks] (a) P(s)-2 (b) P(s)-1s3 (c) P(s) -4-8 s+2 (s-2) (s+10)
1. Consider the usual unity-feedback closed-loop control system with a...
 control systems
1) Using Routh Hurwitz Stability Criteria, determine whether the following system of equation is stable or not. a) S4+253+3S2+45+5=0 2) Using the Routh Hurwitz stability criterion, determine the range of K for stability of the following characteristic equation. a) s4+2s8+(4+K)s2+9s+25=0 3)Sketch the root-locus of the following systems a) G(s)H(s) = s(s+1)(s+2) b) G(s)H(s) = 52(8+3.6) K(5+1)
control systems
1) Using Routh Hurwitz Stability Criteria, determine whether the following system of equation is stable or not. a) S4+253+3S2+45+5=0 2) Using the Routh Hurwitz stability criterion, determine the range of K for stability of the following characteristic equation. a) s4+2s8+(4+K)s2+9s+25=0 3)Sketch the root-locus of the following systems a) G(s)H(s) = s(s+1)(s+2) b) G(s)H(s) = 52(8+3.6) K(5+1)
 1. Use the Routh-Hurwitz test to determine if the system described by the following transfer function is stable. If the system is unstable, how many poles are outside the LHP? Use Matlab to check your answers. C() 10-8) R(s) s2 +7s +28 2. Repeat problem 1) above for the system with transfer function C (s) R(5s +Bs+ 40 s2 +2s+4 3. Use the Routh-Hurwitz test to determine if the system described by the following characteristic equation is stable. If the...
1. Use the Routh-Hurwitz test to determine if the system described by the following transfer function is stable. If the system is unstable, how many poles are outside the LHP? Use Matlab to check your answers. C() 10-8) R(s) s2 +7s +28 2. Repeat problem 1) above for the system with transfer function C (s) R(5s +Bs+ 40 s2 +2s+4 3. Use the Routh-Hurwitz test to determine if the system described by the following characteristic equation is stable. If the...
 Question 2: By using Routh Hurwitz tabulation method, determine whether the unity feedback system of Figure 2 is stable if 240 G(s)- R(S) + G(S) Figure 2 a. How many poles are in the right half-plane, left-half in the system? b. Verify the system stability by using vissim simulation
Question 2: By using Routh Hurwitz tabulation method, determine whether the unity feedback system of Figure 2 is stable if 240 G(s)- R(S) + G(S) Figure 2 a. How many poles are in the right half-plane, left-half in the system? b. Verify the system stability by using vissim simulation
 4) Using the Routh-Hurwitz Criterion, determine whether the following Polynomials are Stable or Unstable. Please Show Supporting Work: 1) H(s) = s? + 10s + 5 = 0 Stable Unstable 11) H(s) = s4 +53 + 5s2 + 20s + 10 = 0 Stable Unstable 111) H(s) = 83 + 4Ks2 + (5 + K)s + 10 = 0 The Range of K for a Stable System is: a. b. K > 0.46 K< 0.46 0<K <0.46 Unstable for all...
4) Using the Routh-Hurwitz Criterion, determine whether the following Polynomials are Stable or Unstable. Please Show Supporting Work: 1) H(s) = s? + 10s + 5 = 0 Stable Unstable 11) H(s) = s4 +53 + 5s2 + 20s + 10 = 0 Stable Unstable 111) H(s) = 83 + 4Ks2 + (5 + K)s + 10 = 0 The Range of K for a Stable System is: a. b. K > 0.46 K< 0.46 0<K <0.46 Unstable for all...
 Consider the system shown in Figure 1. Using the Routh-Hurwitz Criterion, determine the range of K for which the system is stable. R(s) Figure 1
Consider the system shown in Figure 1. Using the Routh-Hurwitz Criterion, determine the range of K for which the system is stable. R(s) Figure 1
Most questions answered within 3 hours.
-
If you’re standing at the bottom of a hill and asked to evaluate
it while being...
asked 34 minutes ago -
1. Which region has taken the lead in the world of
e-waste handling?
a) European Union...
asked 28 minutes ago -
A 8.15- g bullet from a 9-mm pistol has a velocity of 366.0 m/s.
It strikes...
asked 2 hours ago -
The outstanding bonds of Alpha Extracts have a yield to maturity
of 7.4 percent and a...
asked 1 hour ago -
The Problem: The Case of the Harmonizing Vacations
Your CEO is exploring partnering with a European...
asked 3 hours ago -
A chemical equation is balanced by adding coefficients in front
of some formulas so that the...
asked 3 hours ago -
From the literature (reference your sources): What are the
lattice parameters of calcite and aragonite? Why...
asked 4 hours ago -
Your system is rejecting the question am asking which is
preceded by a case study. It...
asked 4 hours ago -
3. On January 2, 2000, Larry creates a trust with himself as
trustee. Larry as trustee...
asked 4 hours ago -
A member of the volleyball team spikes the ball. During this
process, she changes the velocity...
asked 4 hours ago -
Are adult gamers less likely to use a gaming console (Xbox,
PlayStation, Wii, etc...) than teen...
asked 5 hours ago -
The University of
Texas recently reported that 43% of college students aged 18-24
would spend their...
asked 5 hours ago