
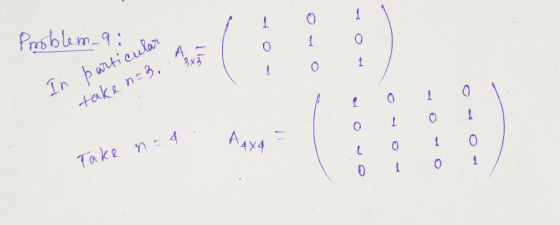
Problem 8. Which of the following statements are correct for the vector space C1(R) of all real valued continuous functions on R with continuous derivative and the vector operations being the usual pointwise addition and scalar multiplication of functions. 1. Since RC(R), the vector space C1(R) is infinite dimensional 2. The set sin, cos) is a linearfly dependent set in C1(R) 3. tan span[sin, cos] in C1(R) 4. If R- R be the functions defined by: p(x) e and q(r) er, then p,g is a linearly dependent set in C1(R) 5. For any differentiable fucton R 2 R with a differentiable derivative RR, the set p,p is linearly dependent in C1(R) Problem 9. Let A = ( aij)1sijsn be a square matrix of order n, where: 1, if i +j is even aij-i0, if计jis odd . Which of the following statement is correct? 1. The sum of any row/column of A is n. 2. Ax-0 has exactly one solution. 3. Ax 0 does not have a solution 41 4. rankA 2 and nullity A n -2. 5. A is symmetric.
Homework Answers





Add Answer to:
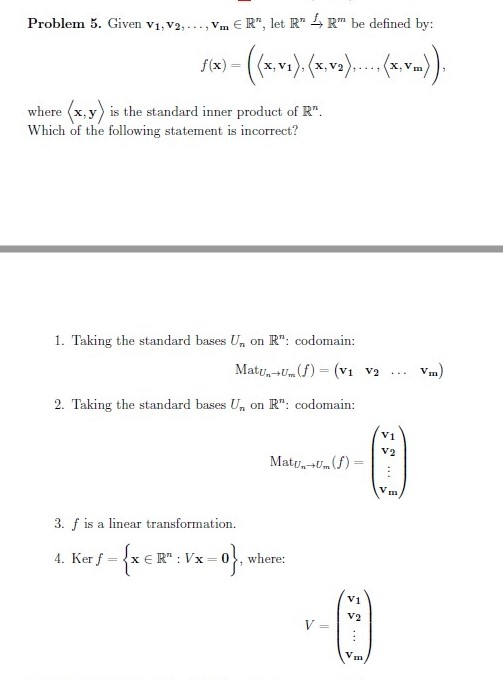
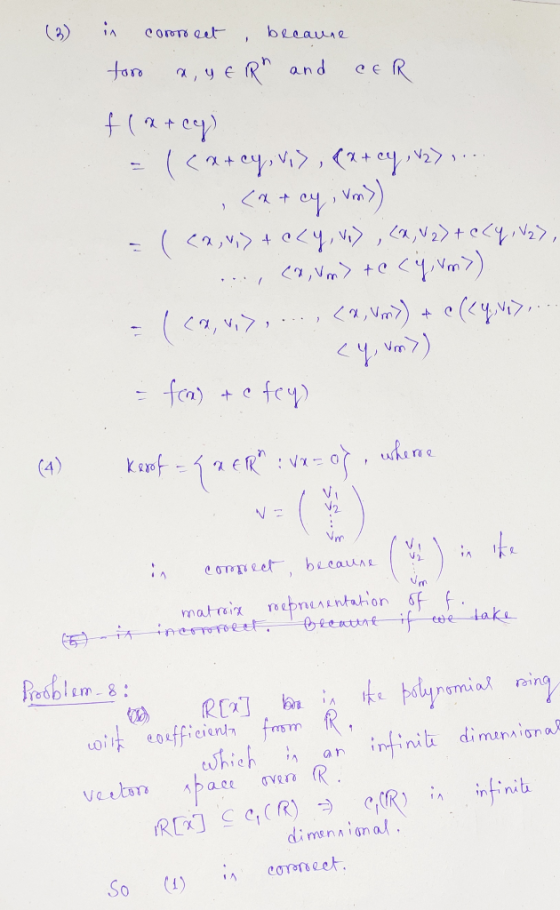
Problem 5. Given vi,v2,... ,Vm R", let RRm be defined by f(x)-x, v1), x, v2), (x, Vm where (x' y)...
Problem 4. Let GL2(R) be the vector space of 2 x 2 square matrices with usual matrix addition and...
 Problem 4. Let GL2(R) be the vector space of 2 x 2 square matrices with usual matrix addition and scalar multiplication, and Wー State the incorrect statement from the following five 1. W is a subspace of GL2(R) with basis 2. W -Ker f, where GL2(R) R is the linear transformation defined by: 3. Given the basis B in option1. coordB( 23(1,2,2) 4. GC2(R)-W + V, where: 5. Given the basis B in option1. coordB( 2 3 (1,2,3) Problem 5....
Problem 4. Let GL2(R) be the vector space of 2 x 2 square matrices with usual matrix addition and scalar multiplication, and Wー State the incorrect statement from the following five 1. W is a subspace of GL2(R) with basis 2. W -Ker f, where GL2(R) R is the linear transformation defined by: 3. Given the basis B in option1. coordB( 23(1,2,2) 4. GC2(R)-W + V, where: 5. Given the basis B in option1. coordB( 2 3 (1,2,3) Problem 5....
Problem 5: Let V and W be vector spaces and let B = {V1, V2, ...,...
 Problem 5: Let V and W be vector spaces and let B = {V1, V2, ..., Un} CV be a basis for V. Let L :V + W be a linear transformation, and let Ker L = {2 € V: L(x)=0}. (a) If Ker L = {0}, show that C = {L(v1), L(02), ..., L(vn) } CW is a linearly independent set in W. (b) If C = {L(01), L(V2),..., L(Un)} C W is a linearly independent set in W,...
Problem 5: Let V and W be vector spaces and let B = {V1, V2, ..., Un} CV be a basis for V. Let L :V + W be a linear transformation, and let Ker L = {2 € V: L(x)=0}. (a) If Ker L = {0}, show that C = {L(v1), L(02), ..., L(vn) } CW is a linearly independent set in W. (b) If C = {L(01), L(V2),..., L(Un)} C W is a linearly independent set in W,...
1. Find A if (2A)' = [ : :] 2. Determine if {(x,y) : x -...
 1. Find A if (2A)' = [ : :] 2. Determine if {(x,y) : x - y = 1) is a subspace of vector space V - R 3. Let vi, V2, V3 be three linearly independent vectors in a vector space V. Is the set {v1 - 2v2, 2v2 - 3v3, 3V3 - Vi} linearly independent or linearly dependent? Prove your answer.
1. Find A if (2A)' = [ : :] 2. Determine if {(x,y) : x - y = 1) is a subspace of vector space V - R 3. Let vi, V2, V3 be three linearly independent vectors in a vector space V. Is the set {v1 - 2v2, 2v2 - 3v3, 3V3 - Vi} linearly independent or linearly dependent? Prove your answer.
3. Let f: RP-R (a) If f(x)-Ax + b, x E R A є Mq.p and b є R9, show that f is p. where differentia...
 3. Let f: RP-R (a) If f(x)-Ax + b, x E R A є Mq.p and b є R9, show that f is p. where differentiable everywhere and calculate its total derivative (b) If f is differentiable everywhere and Df (x)A, for some A E Mp and all q.p x E Rp, show that there exists b E R, such that f(x) = Ax + b for all x E Rp
3. Let f: RP-R (a) If f(x)-Ax + b,...
3. Let f: RP-R (a) If f(x)-Ax + b, x E R A є Mq.p and b є R9, show that f is p. where differentiable everywhere and calculate its total derivative (b) If f is differentiable everywhere and Df (x)A, for some A E Mp and all q.p x E Rp, show that there exists b E R, such that f(x) = Ax + b for all x E Rp
3. Let f: RP-R (a) If f(x)-Ax + b,...
Let A be an m × n matrix, let x Rn and let 0 be the zero vector in Rm. (a) Let u, v є Rn be any two solutions of Ax 0,...
 Let A be an m × n matrix, let x Rn and let 0 be the zero vector in Rm. (a) Let u, v є Rn be any two solutions of Ax 0, and let c E R. Use the properties of matrix-vector multiplication to show that u+v and cu are also solutions of Ax O. (b) Extend the result of (a) to show that the linear combination cu + dv is a solution of Ax 0 for any c,d...
Let A be an m × n matrix, let x Rn and let 0 be the zero vector in Rm. (a) Let u, v є Rn be any two solutions of Ax 0, and let c E R. Use the properties of matrix-vector multiplication to show that u+v and cu are also solutions of Ax O. (b) Extend the result of (a) to show that the linear combination cu + dv is a solution of Ax 0 for any c,d...
2. Let if r and y are not both 0 f(x, y) = 0 if (x,...
 2. Let if r and y are not both 0 f(x, y) = 0 if (x, y) = (0,0) (a) Show that and we both exist at the origin are are zero (b) Let v = (v1, v2) be a unit vector with vị and v2 both not zero. Prove that V (f) at the origin exists, and compute it directly from the definition. Does the formula Vu(f) = (Vf). ✓ hold at the origin? (c) Is f differentiable at...
2. Let if r and y are not both 0 f(x, y) = 0 if (x, y) = (0,0) (a) Show that and we both exist at the origin are are zero (b) Let v = (v1, v2) be a unit vector with vị and v2 both not zero. Prove that V (f) at the origin exists, and compute it directly from the definition. Does the formula Vu(f) = (Vf). ✓ hold at the origin? (c) Is f differentiable at...
Below are sample questions: [5] 6. Let X F (V1, V2) where v2 > 2. Derive...
 Below are sample questions: [5] 6. Let X F (V1, V2) where v2 > 2. Derive E(X) = 2. Show your work. Hint: You may use the result that if Y ~ (v), then E(Y") = 2 r>-v/2. ru2 + 2/4 for
Below are sample questions: [5] 6. Let X F (V1, V2) where v2 > 2. Derive E(X) = 2. Show your work. Hint: You may use the result that if Y ~ (v), then E(Y") = 2 r>-v/2. ru2 + 2/4 for
Problem 1: Let W = {p(t) € Pz : p'le) = 0}. We know from Problem...
 Problem 1: Let W = {p(t) € Pz : p'le) = 0}. We know from Problem 1, Section 4.3 and Problem 1, Section 4.6 that W is a subspace of P3. Let T:W+Pbe given by T(p(t)) = p' (t). It is easy to check that T is a linear transformation. (a) Find a basis for and the dimension of Range T. (b) Find Ker T, a basis for Ker T and dim KerT. (c) Is T one-to-one? Explain. (d) Is...
Problem 1: Let W = {p(t) € Pz : p'le) = 0}. We know from Problem 1, Section 4.3 and Problem 1, Section 4.6 that W is a subspace of P3. Let T:W+Pbe given by T(p(t)) = p' (t). It is easy to check that T is a linear transformation. (a) Find a basis for and the dimension of Range T. (b) Find Ker T, a basis for Ker T and dim KerT. (c) Is T one-to-one? Explain. (d) Is...
1) Let f:R-->R be defined by f(x) = |x+2|. Prove or Disprove: f is differentiable at...
1) Let f:R-->R be defined by f(x) = |x+2|. Prove or Disprove: f is differentiable at -2 f is differentiable at 1 2) Prove the product rule. Hint: Use f(x)g(x)− f(c)g(c) = f(x)g(x)−g(c))+f(x)− f(c))g(c). 3) Prove the quotient rule. Hint: You can do this directly, but it may be easier to find the derivative of 1/x and then use the chain rule and the product rule. 4) For n∈Z, prove that xn is differentiable and find the derivative, unless, of course, n...
Let Coo denote the set of smooth functions, ie, functions f : R → R whose nth derivative exists, ...
 Let Coo denote the set of smooth functions, ie, functions f : R → R whose nth derivative exists, for all n. Recall that this is a vector space, where "vectors" of Coo are function:s like f(t) = sin(t) or f(t) = te, or polynomials like f(t)-t2-2, or constant functions like f(t) = 5, and more The set of smooth functions f (t) which satisfy the differential equation f"(t) +2f (t) -0 for all t, is the same as the...
Let Coo denote the set of smooth functions, ie, functions f : R → R whose nth derivative exists, for all n. Recall that this is a vector space, where "vectors" of Coo are function:s like f(t) = sin(t) or f(t) = te, or polynomials like f(t)-t2-2, or constant functions like f(t) = 5, and more The set of smooth functions f (t) which satisfy the differential equation f"(t) +2f (t) -0 for all t, is the same as the...
 Problem 4. Let GL2(R) be the vector space of 2 x 2 square matrices with usual matrix addition and scalar multiplication, and Wー State the incorrect statement from the following five 1. W is a subspace of GL2(R) with basis 2. W -Ker f, where GL2(R) R is the linear transformation defined by: 3. Given the basis B in option1. coordB( 23(1,2,2) 4. GC2(R)-W + V, where: 5. Given the basis B in option1. coordB( 2 3 (1,2,3) Problem 5....
Problem 4. Let GL2(R) be the vector space of 2 x 2 square matrices with usual matrix addition and scalar multiplication, and Wー State the incorrect statement from the following five 1. W is a subspace of GL2(R) with basis 2. W -Ker f, where GL2(R) R is the linear transformation defined by: 3. Given the basis B in option1. coordB( 23(1,2,2) 4. GC2(R)-W + V, where: 5. Given the basis B in option1. coordB( 2 3 (1,2,3) Problem 5....
 Problem 5: Let V and W be vector spaces and let B = {V1, V2, ..., Un} CV be a basis for V. Let L :V + W be a linear transformation, and let Ker L = {2 € V: L(x)=0}. (a) If Ker L = {0}, show that C = {L(v1), L(02), ..., L(vn) } CW is a linearly independent set in W. (b) If C = {L(01), L(V2),..., L(Un)} C W is a linearly independent set in W,...
Problem 5: Let V and W be vector spaces and let B = {V1, V2, ..., Un} CV be a basis for V. Let L :V + W be a linear transformation, and let Ker L = {2 € V: L(x)=0}. (a) If Ker L = {0}, show that C = {L(v1), L(02), ..., L(vn) } CW is a linearly independent set in W. (b) If C = {L(01), L(V2),..., L(Un)} C W is a linearly independent set in W,...
 1. Find A if (2A)' = [ : :] 2. Determine if {(x,y) : x - y = 1) is a subspace of vector space V - R 3. Let vi, V2, V3 be three linearly independent vectors in a vector space V. Is the set {v1 - 2v2, 2v2 - 3v3, 3V3 - Vi} linearly independent or linearly dependent? Prove your answer.
1. Find A if (2A)' = [ : :] 2. Determine if {(x,y) : x - y = 1) is a subspace of vector space V - R 3. Let vi, V2, V3 be three linearly independent vectors in a vector space V. Is the set {v1 - 2v2, 2v2 - 3v3, 3V3 - Vi} linearly independent or linearly dependent? Prove your answer.
 3. Let f: RP-R (a) If f(x)-Ax + b, x E R A є Mq.p and b є R9, show that f is p. where differentiable everywhere and calculate its total derivative (b) If f is differentiable everywhere and Df (x)A, for some A E Mp and all q.p x E Rp, show that there exists b E R, such that f(x) = Ax + b for all x E Rp
3. Let f: RP-R (a) If f(x)-Ax + b,...
3. Let f: RP-R (a) If f(x)-Ax + b, x E R A є Mq.p and b є R9, show that f is p. where differentiable everywhere and calculate its total derivative (b) If f is differentiable everywhere and Df (x)A, for some A E Mp and all q.p x E Rp, show that there exists b E R, such that f(x) = Ax + b for all x E Rp
3. Let f: RP-R (a) If f(x)-Ax + b,...
 Let A be an m × n matrix, let x Rn and let 0 be the zero vector in Rm. (a) Let u, v є Rn be any two solutions of Ax 0, and let c E R. Use the properties of matrix-vector multiplication to show that u+v and cu are also solutions of Ax O. (b) Extend the result of (a) to show that the linear combination cu + dv is a solution of Ax 0 for any c,d...
Let A be an m × n matrix, let x Rn and let 0 be the zero vector in Rm. (a) Let u, v є Rn be any two solutions of Ax 0, and let c E R. Use the properties of matrix-vector multiplication to show that u+v and cu are also solutions of Ax O. (b) Extend the result of (a) to show that the linear combination cu + dv is a solution of Ax 0 for any c,d...
 2. Let if r and y are not both 0 f(x, y) = 0 if (x, y) = (0,0) (a) Show that and we both exist at the origin are are zero (b) Let v = (v1, v2) be a unit vector with vị and v2 both not zero. Prove that V (f) at the origin exists, and compute it directly from the definition. Does the formula Vu(f) = (Vf). ✓ hold at the origin? (c) Is f differentiable at...
2. Let if r and y are not both 0 f(x, y) = 0 if (x, y) = (0,0) (a) Show that and we both exist at the origin are are zero (b) Let v = (v1, v2) be a unit vector with vị and v2 both not zero. Prove that V (f) at the origin exists, and compute it directly from the definition. Does the formula Vu(f) = (Vf). ✓ hold at the origin? (c) Is f differentiable at...
 Below are sample questions: [5] 6. Let X F (V1, V2) where v2 > 2. Derive E(X) = 2. Show your work. Hint: You may use the result that if Y ~ (v), then E(Y") = 2 r>-v/2. ru2 + 2/4 for
Below are sample questions: [5] 6. Let X F (V1, V2) where v2 > 2. Derive E(X) = 2. Show your work. Hint: You may use the result that if Y ~ (v), then E(Y") = 2 r>-v/2. ru2 + 2/4 for
 Problem 1: Let W = {p(t) € Pz : p'le) = 0}. We know from Problem 1, Section 4.3 and Problem 1, Section 4.6 that W is a subspace of P3. Let T:W+Pbe given by T(p(t)) = p' (t). It is easy to check that T is a linear transformation. (a) Find a basis for and the dimension of Range T. (b) Find Ker T, a basis for Ker T and dim KerT. (c) Is T one-to-one? Explain. (d) Is...
Problem 1: Let W = {p(t) € Pz : p'le) = 0}. We know from Problem 1, Section 4.3 and Problem 1, Section 4.6 that W is a subspace of P3. Let T:W+Pbe given by T(p(t)) = p' (t). It is easy to check that T is a linear transformation. (a) Find a basis for and the dimension of Range T. (b) Find Ker T, a basis for Ker T and dim KerT. (c) Is T one-to-one? Explain. (d) Is...
 Let Coo denote the set of smooth functions, ie, functions f : R → R whose nth derivative exists, for all n. Recall that this is a vector space, where "vectors" of Coo are function:s like f(t) = sin(t) or f(t) = te, or polynomials like f(t)-t2-2, or constant functions like f(t) = 5, and more The set of smooth functions f (t) which satisfy the differential equation f"(t) +2f (t) -0 for all t, is the same as the...
Let Coo denote the set of smooth functions, ie, functions f : R → R whose nth derivative exists, for all n. Recall that this is a vector space, where "vectors" of Coo are function:s like f(t) = sin(t) or f(t) = te, or polynomials like f(t)-t2-2, or constant functions like f(t) = 5, and more The set of smooth functions f (t) which satisfy the differential equation f"(t) +2f (t) -0 for all t, is the same as the...
Most questions answered within 3 hours.
-
A coach uses a new technique to train gymnasts. Seven
gymnasts were randomly selected and their...
asked 1 hour ago -
While rotating the tires on your car you notice a rock [mass =
0.1 Kg] stuck...
asked 3 hours ago -
Using MARS simulator, write MIPS programs according to
the following scenarios: Receive a positive integer number...
asked 5 hours ago -
An object in front of a concave mirror has a real image that is
11.5 cm...
asked 5 hours ago -
Consider the reaction, C3 H8 + O2 --> CO2 + H2O. How many
moles of O2...
asked 7 hours ago -
You and your opponent both roll a fair die. If you both roll the
same number,...
asked 7 hours ago -
In a study of the accuracy of fast food drive-through orders,
Restaurant A had 257 accurate...
asked 7 hours ago -
Identify and describe in detail the four categories of
institutions that could be included in a...
asked 7 hours ago -
In python
class Customer:
def __init__(self, customer_id, last_name, first_name, phone_number, address):
self._customer_id = int(customer_id)
self._last_name =...
asked 7 hours ago -
What is an example of a limitation in implementing a new
ERP system and how it...
asked 7 hours ago -
In a section of 9.7cm of an artery with a radius of 2.6mm there
is a...
asked 7 hours ago -
the two carboxylic acid groups of aspartic acid have different
acidities with pKa values of 2.1...
asked 7 hours ago