
Homework Answers
MATLAB code is given below in bold letters.
clc;
clear all;
close all;
% define complex variable s as below
s = tf('s');
% now define T(s) as follows
T = 140/(s^4+12*s^3+39*s^2+48*s+140);
% Now the closed loop transfer function definition named
as G
G = feedback(T,1) % Assuming unity feedback loop
% finding the location of poles of this transfer
function
p = pole(G); % closed loop poles
% plot the pole and zero locations
figure;pzmap(G);
% plotting the step response of the closed loop
system
figure;step(G);title('Step response of the closed loop
system');
grid on;
RESULTS:
Closed-loop transfer function G:
G =
140
----------------------------------
s^4 + 12 s^3 + 39 s^2 + 48 s + 280
Continuous-time transfer function.
Closed-loop poles:
p =
-6.4113 + 1.3924i
-6.4113 - 1.3924i
0.4113 + 2.5171i
0.4113 - 2.5171i
Closed-loop pole locations plot in complex s plane: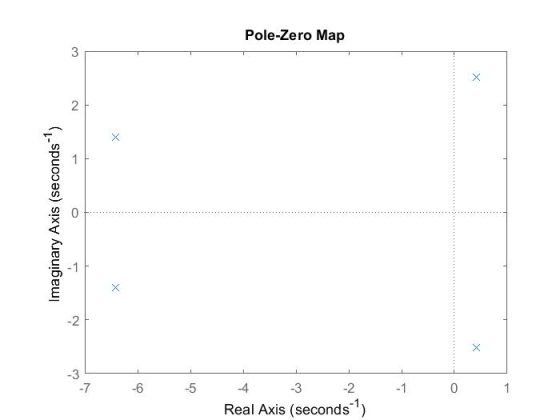
closed loop step response:
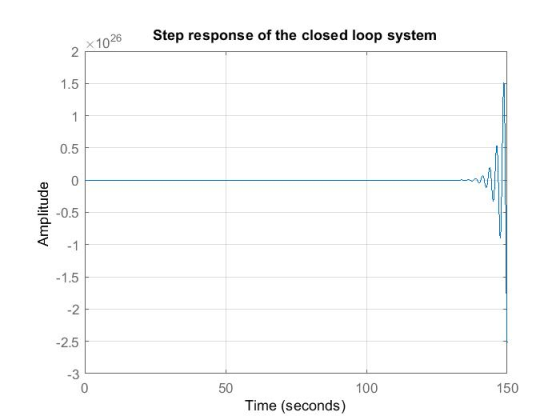
From the above plot, it is observed that the response is unstable as it goes to infinite. This can be related to the location of closed-loop poles given in the PZ map of the system given before. It is observed that the system has two closed-loop poles lie on the right side of the jw axis. These poles are responsible for the unstable response.
Add Answer to:
R(s) Ts(s) 140 s4 +12s3 39s2 48s 140 Experiment 1 For the system shown in preliminarily: In Matla...
(20 pts) System Design Using Routh-Hurwitz Criterion: one of the reasons we learn Routh-Hurwitz C...
 (20 pts) System Design Using Routh-Hurwitz Criterion: one of the reasons we learn Routh-Hurwitz Criterion is that it can help us select the system parameters to make the system stable. In this problem, we will go over this process. Considering a system with the following transfer function: 1. s +2 G(s) = s4 +5s3 2s2 +s + K 1.1 Work out the Routh-Hurwitz table. Note in this case, you will have the unknown parameter K in the table. 1.2 Based...
(20 pts) System Design Using Routh-Hurwitz Criterion: one of the reasons we learn Routh-Hurwitz Criterion is that it can help us select the system parameters to make the system stable. In this problem, we will go over this process. Considering a system with the following transfer function: 1. s +2 G(s) = s4 +5s3 2s2 +s + K 1.1 Work out the Routh-Hurwitz table. Note in this case, you will have the unknown parameter K in the table. 1.2 Based...
PROBLEM 1 Consider the transfer function T(S) =s5 +2s4 + 2s3 + 4s2 + s + 2 a) Using the Routh-Hurwitz method, determine whether the system is stable. If it is not stable, how many poles are in the...
 PROBLEM 1 Consider the transfer function T(S) =s5 +2s4 + 2s3 + 4s2 + s + 2 a) Using the Routh-Hurwitz method, determine whether the system is stable. If it is not stable, how many poles are in the right-half plane? b) Using MATLAB, compute the poles of T(s) and verify the result in part a) c) Plot the unit step response and discuss the results. (Report should include: Code, Figure 1.Unit step response, answers and conclusion)
PROBLEM 1 Consider...
PROBLEM 1 Consider the transfer function T(S) =s5 +2s4 + 2s3 + 4s2 + s + 2 a) Using the Routh-Hurwitz method, determine whether the system is stable. If it is not stable, how many poles are in the right-half plane? b) Using MATLAB, compute the poles of T(s) and verify the result in part a) c) Plot the unit step response and discuss the results. (Report should include: Code, Figure 1.Unit step response, answers and conclusion)
PROBLEM 1 Consider...
Please solve it with step by step MATLAB code, thank you! Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 03K35 and...
 Please solve it with step by step MATLAB code, thank you!
Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 03K35 and plot the outputs where the poles are represented by "W" letter. Find the interval of K parameter for stability using Routh-Hurwitz method. Calculate the poles of the closed loop transfer function where K attains the minimum value such that the system...
Please solve it with step by step MATLAB code, thank you!
Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 03K35 and plot the outputs where the poles are represented by "W" letter. Find the interval of K parameter for stability using Routh-Hurwitz method. Calculate the poles of the closed loop transfer function where K attains the minimum value such that the system...
Please solve these using matlab Problem 1 Given the transfer functions e S +5 (a) C(s)...
 Please solve these using matlab
Problem 1 Given the transfer functions e S +5 (a) C(s) 20 S + 20 (b) Use the step function to determine the time constant and rise time for each system. Note: estimate these values from the plot and do not use the stepinfo function. Problem 2 Given the transfer function 100 G(S) = 22 +45 + 25 a. Use the plot resulting from the step function in MATLAB to determine the percent overshoot, settling...
Please solve these using matlab
Problem 1 Given the transfer functions e S +5 (a) C(s) 20 S + 20 (b) Use the step function to determine the time constant and rise time for each system. Note: estimate these values from the plot and do not use the stepinfo function. Problem 2 Given the transfer function 100 G(S) = 22 +45 + 25 a. Use the plot resulting from the step function in MATLAB to determine the percent overshoot, settling...
4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer f...
 4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
please do all step clean and neat Apply Routh-Hurwitz criterion to determine whether the given control...
 please do all step clean and neat
Apply Routh-Hurwitz criterion to determine whether the given control system is stable or unstable? b) Tell how many poles of the closed loop transfer function lie in the right half-plane. left half-plane, and on the jo-axis? Justify your answer. a Cis) R(s) +4s-3 .4p832+ 20 15
please do all step clean and neat
Apply Routh-Hurwitz criterion to determine whether the given control system is stable or unstable? b) Tell how many poles of the closed loop transfer function lie in the right half-plane. left half-plane, and on the jo-axis? Justify your answer. a Cis) R(s) +4s-3 .4p832+ 20 15
' 1. Review Question a) Name three applications for feedback control systems. b) Functionally, ho...
 ' 1. Review Question a) Name three applications for feedback control systems. b) Functionally, how do closed-loop systems differ from open-loop systems? c) Name the three major design criteria for control systems. d) Name the performance specification for first-order systems. e) Briefly describe how the zeros of the open-loop system affect the root locus and the transient response. What does the Routh-Hurwitz criterion tell us? f) 2. Given the electric network shown in Figure. a) Write the differential equation for...
' 1. Review Question a) Name three applications for feedback control systems. b) Functionally, how do closed-loop systems differ from open-loop systems? c) Name the three major design criteria for control systems. d) Name the performance specification for first-order systems. e) Briefly describe how the zeros of the open-loop system affect the root locus and the transient response. What does the Routh-Hurwitz criterion tell us? f) 2. Given the electric network shown in Figure. a) Write the differential equation for...
Consider the unity feedback system shown below with 20 G(s)- R(s) + Es) C(s) Using Routh-Hurwitz...
 Consider the unity feedback system shown below with 20 G(s)- R(s) + Es) C(s) Using Routh-Hurwitz criterion, determine where the closed-loop poles are located (i.e., right half-plane, left half-plane, jo-axis)
Consider the unity feedback system shown below with 20 G(s)- R(s) + Es) C(s) Using Routh-Hurwitz criterion, determine where the closed-loop poles are located (i.e., right half-plane, left half-plane, jo-axis)
PROBLEM 2 Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 0sKs5 and plot the outputs where the poles are represented...
 PROBLEM 2 Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 0sKs5 and plot the outputs where the poles are represented by "W" letter. Find the interval of K parameter for stability using Routh-Hurwitz method. Calculate the poles of the closed loop transfer function where K attains the minimum value such that the system is stable. R(s) 52(K - 3)s + K Figure...
PROBLEM 2 Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 0sKs5 and plot the outputs where the poles are represented by "W" letter. Find the interval of K parameter for stability using Routh-Hurwitz method. Calculate the poles of the closed loop transfer function where K attains the minimum value such that the system is stable. R(s) 52(K - 3)s + K Figure...
1. Use the Routh-Hurwitz test to determine if the system described by the following transfer function...
 1. Use the Routh-Hurwitz test to determine if the system described by the following transfer function is stable. If the system is unstable, how many poles are outside the LHP? Use Matlab to check your answers. C() 10-8) R(s) s2 +7s +28 2. Repeat problem 1) above for the system with transfer function C (s) R(5s +Bs+ 40 s2 +2s+4 3. Use the Routh-Hurwitz test to determine if the system described by the following characteristic equation is stable. If the...
1. Use the Routh-Hurwitz test to determine if the system described by the following transfer function is stable. If the system is unstable, how many poles are outside the LHP? Use Matlab to check your answers. C() 10-8) R(s) s2 +7s +28 2. Repeat problem 1) above for the system with transfer function C (s) R(5s +Bs+ 40 s2 +2s+4 3. Use the Routh-Hurwitz test to determine if the system described by the following characteristic equation is stable. If the...
 (20 pts) System Design Using Routh-Hurwitz Criterion: one of the reasons we learn Routh-Hurwitz Criterion is that it can help us select the system parameters to make the system stable. In this problem, we will go over this process. Considering a system with the following transfer function: 1. s +2 G(s) = s4 +5s3 2s2 +s + K 1.1 Work out the Routh-Hurwitz table. Note in this case, you will have the unknown parameter K in the table. 1.2 Based...
(20 pts) System Design Using Routh-Hurwitz Criterion: one of the reasons we learn Routh-Hurwitz Criterion is that it can help us select the system parameters to make the system stable. In this problem, we will go over this process. Considering a system with the following transfer function: 1. s +2 G(s) = s4 +5s3 2s2 +s + K 1.1 Work out the Routh-Hurwitz table. Note in this case, you will have the unknown parameter K in the table. 1.2 Based...
 PROBLEM 1 Consider the transfer function T(S) =s5 +2s4 + 2s3 + 4s2 + s + 2 a) Using the Routh-Hurwitz method, determine whether the system is stable. If it is not stable, how many poles are in the right-half plane? b) Using MATLAB, compute the poles of T(s) and verify the result in part a) c) Plot the unit step response and discuss the results. (Report should include: Code, Figure 1.Unit step response, answers and conclusion)
PROBLEM 1 Consider...
PROBLEM 1 Consider the transfer function T(S) =s5 +2s4 + 2s3 + 4s2 + s + 2 a) Using the Routh-Hurwitz method, determine whether the system is stable. If it is not stable, how many poles are in the right-half plane? b) Using MATLAB, compute the poles of T(s) and verify the result in part a) c) Plot the unit step response and discuss the results. (Report should include: Code, Figure 1.Unit step response, answers and conclusion)
PROBLEM 1 Consider...
 Please solve it with step by step MATLAB code, thank you!
Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 03K35 and plot the outputs where the poles are represented by "W" letter. Find the interval of K parameter for stability using Routh-Hurwitz method. Calculate the poles of the closed loop transfer function where K attains the minimum value such that the system...
Please solve it with step by step MATLAB code, thank you!
Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 03K35 and plot the outputs where the poles are represented by "W" letter. Find the interval of K parameter for stability using Routh-Hurwitz method. Calculate the poles of the closed loop transfer function where K attains the minimum value such that the system...
 Please solve these using matlab
Problem 1 Given the transfer functions e S +5 (a) C(s) 20 S + 20 (b) Use the step function to determine the time constant and rise time for each system. Note: estimate these values from the plot and do not use the stepinfo function. Problem 2 Given the transfer function 100 G(S) = 22 +45 + 25 a. Use the plot resulting from the step function in MATLAB to determine the percent overshoot, settling...
Please solve these using matlab
Problem 1 Given the transfer functions e S +5 (a) C(s) 20 S + 20 (b) Use the step function to determine the time constant and rise time for each system. Note: estimate these values from the plot and do not use the stepinfo function. Problem 2 Given the transfer function 100 G(S) = 22 +45 + 25 a. Use the plot resulting from the step function in MATLAB to determine the percent overshoot, settling...
 4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
4) A unity feedback control system shown in Figure 2 has the following controller and process with the transfer functions: m(60100c Prs(s +10(s+7.5) a) Obtain the open- and closed-loop transfer functions of the system. b) Obtain the stability conditions using the Routh-Hurwitz criterion. e) Setting by trial-and-error some values for Kp, Ki, and Ko, obtain the time response for minimum overshoot and minimum settling time by Matlab/Simulink. Y(s) R(s) E(s) Fig. 2: Unity feedback control system
4) A unity feedback...
 please do all step clean and neat
Apply Routh-Hurwitz criterion to determine whether the given control system is stable or unstable? b) Tell how many poles of the closed loop transfer function lie in the right half-plane. left half-plane, and on the jo-axis? Justify your answer. a Cis) R(s) +4s-3 .4p832+ 20 15
please do all step clean and neat
Apply Routh-Hurwitz criterion to determine whether the given control system is stable or unstable? b) Tell how many poles of the closed loop transfer function lie in the right half-plane. left half-plane, and on the jo-axis? Justify your answer. a Cis) R(s) +4s-3 .4p832+ 20 15
 ' 1. Review Question a) Name three applications for feedback control systems. b) Functionally, how do closed-loop systems differ from open-loop systems? c) Name the three major design criteria for control systems. d) Name the performance specification for first-order systems. e) Briefly describe how the zeros of the open-loop system affect the root locus and the transient response. What does the Routh-Hurwitz criterion tell us? f) 2. Given the electric network shown in Figure. a) Write the differential equation for...
' 1. Review Question a) Name three applications for feedback control systems. b) Functionally, how do closed-loop systems differ from open-loop systems? c) Name the three major design criteria for control systems. d) Name the performance specification for first-order systems. e) Briefly describe how the zeros of the open-loop system affect the root locus and the transient response. What does the Routh-Hurwitz criterion tell us? f) 2. Given the electric network shown in Figure. a) Write the differential equation for...
 Consider the unity feedback system shown below with 20 G(s)- R(s) + Es) C(s) Using Routh-Hurwitz criterion, determine where the closed-loop poles are located (i.e., right half-plane, left half-plane, jo-axis)
Consider the unity feedback system shown below with 20 G(s)- R(s) + Es) C(s) Using Routh-Hurwitz criterion, determine where the closed-loop poles are located (i.e., right half-plane, left half-plane, jo-axis)
 PROBLEM 2 Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 0sKs5 and plot the outputs where the poles are represented by "W" letter. Find the interval of K parameter for stability using Routh-Hurwitz method. Calculate the poles of the closed loop transfer function where K attains the minimum value such that the system is stable. R(s) 52(K - 3)s + K Figure...
PROBLEM 2 Suppose that a system is shown in Figure 2. Based on for loop, write a piece of MATLAB code to calculate the closed loop poles for 0sKs5 and plot the outputs where the poles are represented by "W" letter. Find the interval of K parameter for stability using Routh-Hurwitz method. Calculate the poles of the closed loop transfer function where K attains the minimum value such that the system is stable. R(s) 52(K - 3)s + K Figure...
 1. Use the Routh-Hurwitz test to determine if the system described by the following transfer function is stable. If the system is unstable, how many poles are outside the LHP? Use Matlab to check your answers. C() 10-8) R(s) s2 +7s +28 2. Repeat problem 1) above for the system with transfer function C (s) R(5s +Bs+ 40 s2 +2s+4 3. Use the Routh-Hurwitz test to determine if the system described by the following characteristic equation is stable. If the...
1. Use the Routh-Hurwitz test to determine if the system described by the following transfer function is stable. If the system is unstable, how many poles are outside the LHP? Use Matlab to check your answers. C() 10-8) R(s) s2 +7s +28 2. Repeat problem 1) above for the system with transfer function C (s) R(5s +Bs+ 40 s2 +2s+4 3. Use the Routh-Hurwitz test to determine if the system described by the following characteristic equation is stable. If the...
Most questions answered within 3 hours.
-
Explain in detail
Germany is the fifth largest economy
explain what goods and services Germany specializes...
asked 12 minutes ago -
The density of platinum is 21.45 g/mL. If a cube of platinum
with a mass of...
asked 17 minutes ago -
Accounts Receivable
Sales
A/R Posting
Extended Sales Invoice
Packing Slip
Compare invoice to packing slip 2...
asked 20 minutes ago -
Michaella, age 23, is a full-time law student and is claimed by
her parents as a...
asked 21 minutes ago -
Why are polymers not typically casted into products?
asked 38 minutes ago -
When rolling a die 129 times, what is the probability of rolling
a 6 no more...
asked 54 minutes ago -
4. A call option currently sells for $7.75. It has a strike
price of $85 and...
asked 43 minutes ago -
1.
You need to prepare 10.0 liters of an acid aqueous solution with a
pH of...
asked 46 minutes ago -
Along an aggregate supply curve, if the level of output is less
than the natural level...
asked 47 minutes ago -
By 2025, annual consumption in emerging markets will total $30
trillion and contribute more than ________...
asked 52 minutes ago -
At what point does reformation cease to be a viable option for
those who are oppressed...
asked 56 minutes ago -
Place letters corresponding to amounts in the proper order for
lightest to heaviest samples:
a) 2100...
asked 1 hour ago