
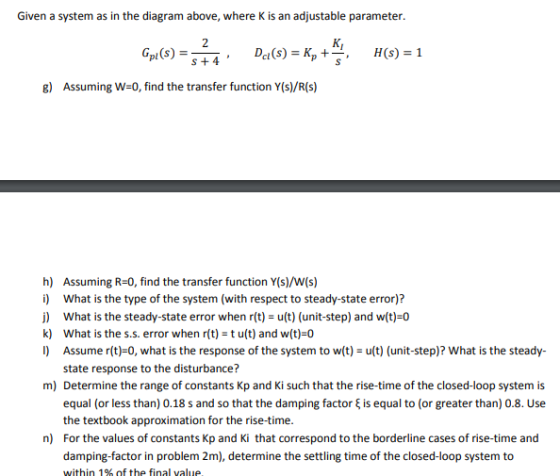
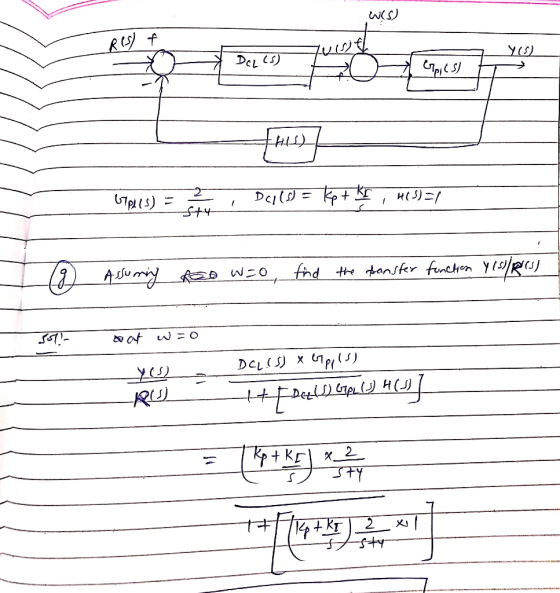
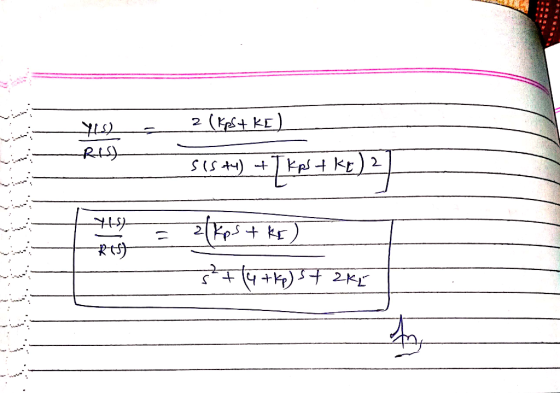
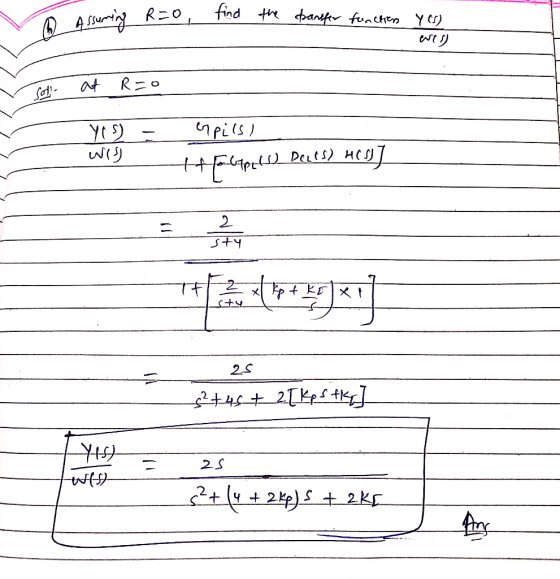
Given a system as in the diagram above, where K is an adjustable parameter pl(s) Dal(sKp+ g) Assuming W-0, find the transfer function Y(s)/R(s) h) Assuming R-0, find the transfer function Y(s)/W(s) i) What is the type of the system (with respect to steady-state error)? j) What is the steady-state error when rt)u(t) (unit-step) and w(t)-0 k) What is the s.s. error when r(t) t u(t) and w(t)-0 ) Assume r(t)-0, what is the response of the system to w(t) ut) (unit-step)? What is the steady- state response to the disturbance? m) Determine the range of constants Kp and Ki such that the rise-time of the closed-loop system is equal (or less than) 0.18 s and so that the damping factor ξ is equal to (or greater than) 0.8. Use the textbook approximation for the rise-time. For the values of constants Kp and Ki that correspond to the borderline cases of rise-time and damping-factor in problem 2m), determine the settling time of the closed-loop system to within 1% of the final value n)
Homework Answers

Add Answer to:
Wis) R(s u(s) 14 Gl(s) H(s) Given a system as in the diagram above, where K is an adjustable pa...
Problem 2 Wis) R(s) U(s) Gol (s) D a (s) E(s) H(s) Given a system as in the diagram above, use MATLAB to solve the problems: Assume we want the closed-loop system rise time to be t, 0.18 sec S + Z H(...
 Problem 2 Wis) R(s) U(s) Gol (s) D a (s) E(s) H(s) Given a system as in the diagram above, use MATLAB to solve the problems: Assume we want the closed-loop system rise time to be t, 0.18 sec S + Z H(s) 1 Gpl)s(s+)et s(s 1) s + p a) Assume W(s)-0. Draw the root locus of the system assuming compensator consists only of the adjustable gain parameter K, i.e. Dct (s) Determine the approximate range of values of...
Problem 2 Wis) R(s) U(s) Gol (s) D a (s) E(s) H(s) Given a system as in the diagram above, use MATLAB to solve the problems: Assume we want the closed-loop system rise time to be t, 0.18 sec S + Z H(s) 1 Gpl)s(s+)et s(s 1) s + p a) Assume W(s)-0. Draw the root locus of the system assuming compensator consists only of the adjustable gain parameter K, i.e. Dct (s) Determine the approximate range of values of...
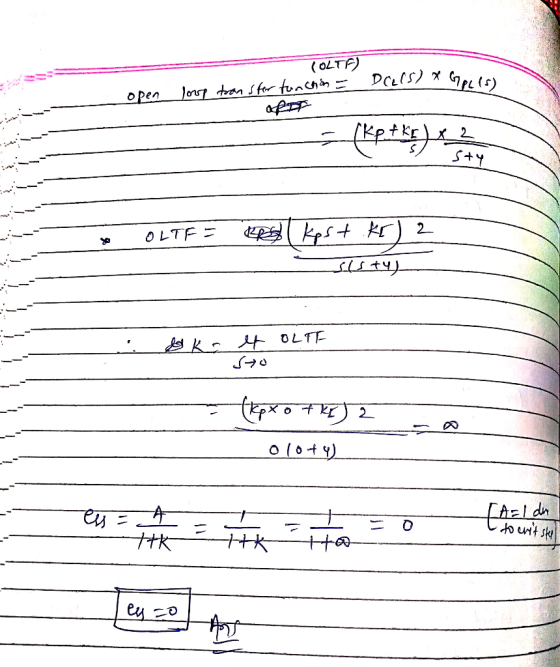
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller trans...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given ...
 The Class Name is: MAE 318 System Dynamics and Control I
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given below. Assuming that the tunable constant Khas a value that makes this closed-loop system stable, find the steady-state error of the closed-loop system for (a a step reference input with amplitude R, r(t)- R u(t) (ii) a ramp reference input with slope R, r(t) = Rt-us(t) R(s) Y(s) (s+2)(s +5) (b) A block...
The Class Name is: MAE 318 System Dynamics and Control I
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given below. Assuming that the tunable constant Khas a value that makes this closed-loop system stable, find the steady-state error of the closed-loop system for (a a step reference input with amplitude R, r(t)- R u(t) (ii) a ramp reference input with slope R, r(t) = Rt-us(t) R(s) Y(s) (s+2)(s +5) (b) A block...
help Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine...
 help
Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine the closed-loop transfer function T(s) Y(s)/R(s). (b) Determine the steady-state error of the closed-loop system response to a unit ramp input, R(s) 1/s (c) Select a value for Ka so that the steady-state error of the system response to a unit step input, R(s)1/s, is zero.
help
Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine the closed-loop transfer function T(s) Y(s)/R(s). (b) Determine the steady-state error of the closed-loop system response to a unit ramp input, R(s) 1/s (c) Select a value for Ka so that the steady-state error of the system response to a unit step input, R(s)1/s, is zero.
Consider the closed loop system defined by the following block diagram. a) Compute the transfer function...
 Consider the closed loop system defined by the following block diagram. a) Compute the transfer function E(s)/R(s). b) Determine the steady state error for a unit-step 1. Controller ant Itly Ro- +- HI- 4단Toy , c) d) e) reference input signal. Determine the steady state error response for a unit-ramp reference input signal. Determine the locations of the closed loop poles of the system. Select system parameters kp and ki in terms of k so that damping coefficient V2/2 and...
Consider the closed loop system defined by the following block diagram. a) Compute the transfer function E(s)/R(s). b) Determine the steady state error for a unit-step 1. Controller ant Itly Ro- +- HI- 4단Toy , c) d) e) reference input signal. Determine the steady state error response for a unit-ramp reference input signal. Determine the locations of the closed loop poles of the system. Select system parameters kp and ki in terms of k so that damping coefficient V2/2 and...
Question #4 (25 points): Consider the open loop system that has the following transfer function 1 G(S) = 10s+ 35 Us...
 Question #4 (25 points): Consider the open loop system that has the following transfer function 1 G(S) = 10s+ 35 Using Matlab: a) Plot the step response of the open loop system and note the settling time and steady state 15 pts error. b) Add proportional control K 300 and simulate the step response of the closed loop 15 pts system. Note the settling time, %OS and steady state error. c) Add proportional derivate control Kp 300, Ko 10 and...
Question #4 (25 points): Consider the open loop system that has the following transfer function 1 G(S) = 10s+ 35 Using Matlab: a) Plot the step response of the open loop system and note the settling time and steady state 15 pts error. b) Add proportional control K 300 and simulate the step response of the closed loop 15 pts system. Note the settling time, %OS and steady state error. c) Add proportional derivate control Kp 300, Ko 10 and...
Problem 51: (25 points) Figure 5 is an example of a feedback control system that is designed to r...
 Problem 51: (25 points) Figure 5 is an example of a feedback control system that is designed to regulate the angular position θ(t) of a motor shaft to a desired value θr(t). The signal e(t) represents the error between the measured shaft angle θ(t) and the desired shaft angle θ (t). The Laplace transforms ofa,(t), θ(t), and e(t) are denoted as ΘR(s), θ(s), and E(s), respectively. The control gains Ki and K2 are chosen by the control engineer to achieve...
Problem 51: (25 points) Figure 5 is an example of a feedback control system that is designed to regulate the angular position θ(t) of a motor shaft to a desired value θr(t). The signal e(t) represents the error between the measured shaft angle θ(t) and the desired shaft angle θ (t). The Laplace transforms ofa,(t), θ(t), and e(t) are denoted as ΘR(s), θ(s), and E(s), respectively. The control gains Ki and K2 are chosen by the control engineer to achieve...
PROBLEMA: (25%) A closed-loop control system is shown below Ds) T(O) U(A) C(s) (a) Show that a proportional controller (C(s)-kp) will never make the closed-loop system stable. (8%) (Hint: you nee...
 PROBLEMA: (25%) A closed-loop control system is shown below Ds) T(O) U(A) C(s) (a) Show that a proportional controller (C(s)-kp) will never make the closed-loop system stable. (8%) (Hint: you need to calculate the closed-loop pole locations and make discussion for the two possible cases.) (Medim) (b) When a PD controller is used (C(s)kp+ kps), calculate the steady state tracking error when both R(s) and D(s) are unit steps. (8%) (Easy) (e) Suppose R(s) is a unit step and D(s)...
PROBLEMA: (25%) A closed-loop control system is shown below Ds) T(O) U(A) C(s) (a) Show that a proportional controller (C(s)-kp) will never make the closed-loop system stable. (8%) (Hint: you need to calculate the closed-loop pole locations and make discussion for the two possible cases.) (Medim) (b) When a PD controller is used (C(s)kp+ kps), calculate the steady state tracking error when both R(s) and D(s) are unit steps. (8%) (Easy) (e) Suppose R(s) is a unit step and D(s)...
P4: The car model of a cruise control system is given in the following transfer function...
 P4: The car model of a cruise control system is given in the following transfer function block diagram ms + b Where v is the car speed u is the control force m is the mass of the vehicle, 1000 kg b is the damping coefficient, 50 N s/m More details are available here (1) Derive the differential equation relating y(t) to u(t) (2) Determine the time constant of the car dynamics (from u to v) If a proportional feedback...
P4: The car model of a cruise control system is given in the following transfer function block diagram ms + b Where v is the car speed u is the control force m is the mass of the vehicle, 1000 kg b is the damping coefficient, 50 N s/m More details are available here (1) Derive the differential equation relating y(t) to u(t) (2) Determine the time constant of the car dynamics (from u to v) If a proportional feedback...
muibliam 5(20%). The closed-loop system is given below. Controller (a) (S%) Find the system transfer function and discuss the range of Ko to make the eystom stuibie assuming K (t)(S%) Find the...
 muibliam 5(20%). The closed-loop system is given below. Controller (a) (S%) Find the system transfer function and discuss the range of Ko to make the eystom stuibie assuming K (t)(S%) Find the percentage of overshoot and stendy state error to the unit ramp input as a function of your design parameter Ke assuming K4 ( d) 5%) Find hed sagn parameters Ko and Kr such that the damping ratio of the closed- lonp system is O15 and the steady state...
muibliam 5(20%). The closed-loop system is given below. Controller (a) (S%) Find the system transfer function and discuss the range of Ko to make the eystom stuibie assuming K (t)(S%) Find the percentage of overshoot and stendy state error to the unit ramp input as a function of your design parameter Ke assuming K4 ( d) 5%) Find hed sagn parameters Ko and Kr such that the damping ratio of the closed- lonp system is O15 and the steady state...
 Problem 2 Wis) R(s) U(s) Gol (s) D a (s) E(s) H(s) Given a system as in the diagram above, use MATLAB to solve the problems: Assume we want the closed-loop system rise time to be t, 0.18 sec S + Z H(s) 1 Gpl)s(s+)et s(s 1) s + p a) Assume W(s)-0. Draw the root locus of the system assuming compensator consists only of the adjustable gain parameter K, i.e. Dct (s) Determine the approximate range of values of...
Problem 2 Wis) R(s) U(s) Gol (s) D a (s) E(s) H(s) Given a system as in the diagram above, use MATLAB to solve the problems: Assume we want the closed-loop system rise time to be t, 0.18 sec S + Z H(s) 1 Gpl)s(s+)et s(s 1) s + p a) Assume W(s)-0. Draw the root locus of the system assuming compensator consists only of the adjustable gain parameter K, i.e. Dct (s) Determine the approximate range of values of...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
 The Class Name is: MAE 318 System Dynamics and Control I
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given below. Assuming that the tunable constant Khas a value that makes this closed-loop system stable, find the steady-state error of the closed-loop system for (a a step reference input with amplitude R, r(t)- R u(t) (ii) a ramp reference input with slope R, r(t) = Rt-us(t) R(s) Y(s) (s+2)(s +5) (b) A block...
The Class Name is: MAE 318 System Dynamics and Control I
Problem 1: Steady-state error analvsis (a) A block diagram of a feedback control system is given below. Assuming that the tunable constant Khas a value that makes this closed-loop system stable, find the steady-state error of the closed-loop system for (a a step reference input with amplitude R, r(t)- R u(t) (ii) a ramp reference input with slope R, r(t) = Rt-us(t) R(s) Y(s) (s+2)(s +5) (b) A block...
 help
Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine the closed-loop transfer function T(s) Y(s)/R(s). (b) Determine the steady-state error of the closed-loop system response to a unit ramp input, R(s) 1/s (c) Select a value for Ka so that the steady-state error of the system response to a unit step input, R(s)1/s, is zero.
help
Consider the closed-loop system in Figure E5.19. where Gs)G 3s and H(s) -K (a) Determine the closed-loop transfer function T(s) Y(s)/R(s). (b) Determine the steady-state error of the closed-loop system response to a unit ramp input, R(s) 1/s (c) Select a value for Ka so that the steady-state error of the system response to a unit step input, R(s)1/s, is zero.
 Consider the closed loop system defined by the following block diagram. a) Compute the transfer function E(s)/R(s). b) Determine the steady state error for a unit-step 1. Controller ant Itly Ro- +- HI- 4단Toy , c) d) e) reference input signal. Determine the steady state error response for a unit-ramp reference input signal. Determine the locations of the closed loop poles of the system. Select system parameters kp and ki in terms of k so that damping coefficient V2/2 and...
Consider the closed loop system defined by the following block diagram. a) Compute the transfer function E(s)/R(s). b) Determine the steady state error for a unit-step 1. Controller ant Itly Ro- +- HI- 4단Toy , c) d) e) reference input signal. Determine the steady state error response for a unit-ramp reference input signal. Determine the locations of the closed loop poles of the system. Select system parameters kp and ki in terms of k so that damping coefficient V2/2 and...
 Question #4 (25 points): Consider the open loop system that has the following transfer function 1 G(S) = 10s+ 35 Using Matlab: a) Plot the step response of the open loop system and note the settling time and steady state 15 pts error. b) Add proportional control K 300 and simulate the step response of the closed loop 15 pts system. Note the settling time, %OS and steady state error. c) Add proportional derivate control Kp 300, Ko 10 and...
Question #4 (25 points): Consider the open loop system that has the following transfer function 1 G(S) = 10s+ 35 Using Matlab: a) Plot the step response of the open loop system and note the settling time and steady state 15 pts error. b) Add proportional control K 300 and simulate the step response of the closed loop 15 pts system. Note the settling time, %OS and steady state error. c) Add proportional derivate control Kp 300, Ko 10 and...
 Problem 51: (25 points) Figure 5 is an example of a feedback control system that is designed to regulate the angular position θ(t) of a motor shaft to a desired value θr(t). The signal e(t) represents the error between the measured shaft angle θ(t) and the desired shaft angle θ (t). The Laplace transforms ofa,(t), θ(t), and e(t) are denoted as ΘR(s), θ(s), and E(s), respectively. The control gains Ki and K2 are chosen by the control engineer to achieve...
Problem 51: (25 points) Figure 5 is an example of a feedback control system that is designed to regulate the angular position θ(t) of a motor shaft to a desired value θr(t). The signal e(t) represents the error between the measured shaft angle θ(t) and the desired shaft angle θ (t). The Laplace transforms ofa,(t), θ(t), and e(t) are denoted as ΘR(s), θ(s), and E(s), respectively. The control gains Ki and K2 are chosen by the control engineer to achieve...
 PROBLEMA: (25%) A closed-loop control system is shown below Ds) T(O) U(A) C(s) (a) Show that a proportional controller (C(s)-kp) will never make the closed-loop system stable. (8%) (Hint: you need to calculate the closed-loop pole locations and make discussion for the two possible cases.) (Medim) (b) When a PD controller is used (C(s)kp+ kps), calculate the steady state tracking error when both R(s) and D(s) are unit steps. (8%) (Easy) (e) Suppose R(s) is a unit step and D(s)...
PROBLEMA: (25%) A closed-loop control system is shown below Ds) T(O) U(A) C(s) (a) Show that a proportional controller (C(s)-kp) will never make the closed-loop system stable. (8%) (Hint: you need to calculate the closed-loop pole locations and make discussion for the two possible cases.) (Medim) (b) When a PD controller is used (C(s)kp+ kps), calculate the steady state tracking error when both R(s) and D(s) are unit steps. (8%) (Easy) (e) Suppose R(s) is a unit step and D(s)...
 P4: The car model of a cruise control system is given in the following transfer function block diagram ms + b Where v is the car speed u is the control force m is the mass of the vehicle, 1000 kg b is the damping coefficient, 50 N s/m More details are available here (1) Derive the differential equation relating y(t) to u(t) (2) Determine the time constant of the car dynamics (from u to v) If a proportional feedback...
P4: The car model of a cruise control system is given in the following transfer function block diagram ms + b Where v is the car speed u is the control force m is the mass of the vehicle, 1000 kg b is the damping coefficient, 50 N s/m More details are available here (1) Derive the differential equation relating y(t) to u(t) (2) Determine the time constant of the car dynamics (from u to v) If a proportional feedback...
 muibliam 5(20%). The closed-loop system is given below. Controller (a) (S%) Find the system transfer function and discuss the range of Ko to make the eystom stuibie assuming K (t)(S%) Find the percentage of overshoot and stendy state error to the unit ramp input as a function of your design parameter Ke assuming K4 ( d) 5%) Find hed sagn parameters Ko and Kr such that the damping ratio of the closed- lonp system is O15 and the steady state...
muibliam 5(20%). The closed-loop system is given below. Controller (a) (S%) Find the system transfer function and discuss the range of Ko to make the eystom stuibie assuming K (t)(S%) Find the percentage of overshoot and stendy state error to the unit ramp input as a function of your design parameter Ke assuming K4 ( d) 5%) Find hed sagn parameters Ko and Kr such that the damping ratio of the closed- lonp system is O15 and the steady state...
Most questions answered within 3 hours.
-
How many liters of 0.669 M KOH will be needed to raise the pH of
0.339...
asked 1 hour ago -
A liquid of density 1270 kg/m 3 flows steadily through a pipe of
varying diameter and...
asked 2 hours ago -
Questions: What should the American executive do?
'A visiting American executive finds that a foreign subsidiary...
asked 2 hours ago -
Activity based costing was introduced as an alternative to
absorption costing.
1. Discuss using illustration the...
asked 2 hours ago -
1. You own shares of Crane DVD Company and are interested in
selling them. With so...
asked 2 hours ago -
How many grams of He are necessary to fill a balloon having a
volume of 4.5E3...
asked 2 hours ago -
The 2 patients, still in the hospital, were interviewed by a
MoH epidemiologist. The interviews revealed...
asked 2 hours ago -
An uncharged capacitor and a resistor are connected in series to
a source of emf. If...
asked 2 hours ago -
If assets are $540,000 and liabilities are $236,000 what is the
amount of owner’s equity?
asked 2 hours ago -
MATH 3421 Maple Assignment 1 Due February 13, 2019 Maple is a
Computer Algebra System that...
asked 2 hours ago -
CODING IN JAVA
Dates are printed in several common formats. Two of the more
common formats...
asked 2 hours ago -
A hydrometer is a device used to measure the density of a
liquid. It is a...
asked 2 hours ago