
Homework Answers
Answer #1
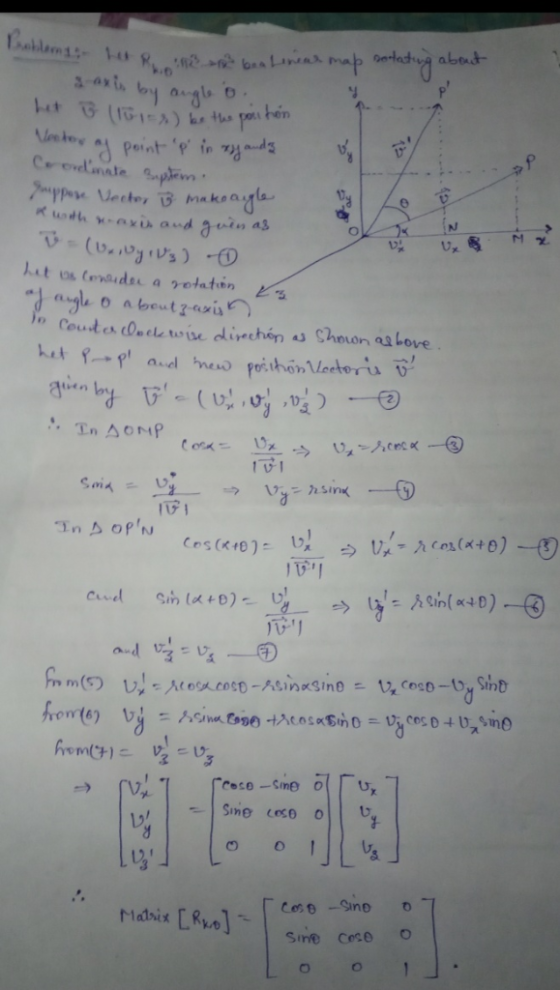

Unio.1 pe.nt."p" y a Soiィニじ IV Tn 스 or'N hm(s) t小,Aeos.coco-As,nxSine t& cego-try SthD = Sine Cese o
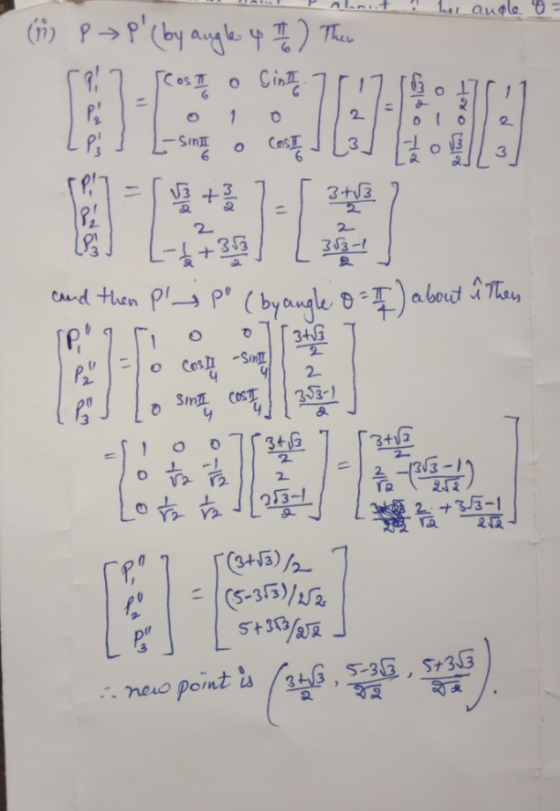
m2 ut point -(13 in space about by We kneothat 石 レ&.又厦 nao point is ( 드끔 , , si-a
We were unable to transcribe this image
Know the answer?
Add Answer to:
Problem 1: Denote by Ruo to be the linear map R3 k, IR3 which rotates points around the vector by...
Not the answer you're looking for?
Ask your own homework help question.
Our experts will answer your question WITHIN MINUTES for Free.
Similar Homework Help Questions
Let rx: R3 → R3 be the linear transformation which rotates counter-clockwise around the x-axis by an angle of π/4 radians
Let rx: R3 → R3 be the linear transformation which rotates counter-clockwise around the x-axis by an angle of π/4 radians. Similarly, let ry be the rotation by an angle of π/4 radians around the y axis. (a) Find the standard matrices for rx and ry (b) Find the standard matrix for rx o ry (c) Find the standard matrix for ry o ry
Hi, could you post solutions to the following questions. Thanks. 2. (a) Let V be a vector space on R. Give the definition of a subspace W of V 2% (b) For each of the following subsets of IR3 sta...
 Hi,
could you post solutions to the following questions. Thanks.
2. (a) Let V be a vector space on R. Give the definition of a subspace W of V 2% (b) For each of the following subsets of IR3 state whether they are subepaces of R3 or not by clearly explaining your answer. 2% 2% (c) Consider the map F : R2 → R3 defined by for any z = (zi,Z2) E R2. 3% 3% 3% 3% i. Show that...
Hi,
could you post solutions to the following questions. Thanks.
2. (a) Let V be a vector space on R. Give the definition of a subspace W of V 2% (b) For each of the following subsets of IR3 state whether they are subepaces of R3 or not by clearly explaining your answer. 2% 2% (c) Consider the map F : R2 → R3 defined by for any z = (zi,Z2) E R2. 3% 3% 3% 3% i. Show that...
 Hi,
could you post solutions to the following questions. Thanks.
2. (a) Let V be a vector space on R. Give the definition of a subspace W of V 2% (b) For each of the following subsets of IR3 state whether they are subepaces of R3 or not by clearly explaining your answer. 2% 2% (c) Consider the map F : R2 → R3 defined by for any z = (zi,Z2) E R2. 3% 3% 3% 3% i. Show that...
Hi,
could you post solutions to the following questions. Thanks.
2. (a) Let V be a vector space on R. Give the definition of a subspace W of V 2% (b) For each of the following subsets of IR3 state whether they are subepaces of R3 or not by clearly explaining your answer. 2% 2% (c) Consider the map F : R2 → R3 defined by for any z = (zi,Z2) E R2. 3% 3% 3% 3% i. Show that...
ADVERTISEMENT
Need Online Homework Help?
Ask
a QuestionGet Answers For Free
Most questions answered within 3 hours.
Most questions answered within 3 hours.
ADVERTISEMENT
ADVERTISEMENT
Active Questions
-
Blood pressure is normally taken on the upper arm at the level
of the heart. Suppose,...
asked 9 seconds ago -
trust is best established through the combination of ------and
------- .
1. magnanimity and justice
2....
asked 1 minute ago -
Calculate the [OH (aq)] in limes which have a [H3O*(aq)] of 1.3 x
10 mol/L
asked 1 minute ago -
Suppose that the satellite around the earth has an orbit that is
24 KM larger in...
asked 3 minutes ago -
A nozzle with a radius of 0.250 cm is attached to a garden hose
with a...
asked 12 minutes ago -
PLEASE do not use any loops for the program; only recursion is
allowed
4. Write a...
asked 21 minutes ago -
Please help me with me. I did the first part to write the operations but in...
asked 18 minutes ago -
Use Cryptool to find the Cryptographic SHA-1 hash value of the
string "abc". The calculator is...
asked 22 minutes ago -
You are attempting to calculate a firm’s free cash flow to
equity. You know the following...
asked 1 hour ago -
the following reaction occurs in a balloon containing
N2O2 gas
N2O4(g)=2NO2(g)
will the volume of the...
asked 1 hour ago -
answer the questions throughout this program
public class Day implements Comparable {
Private Boolean atWork;...
asked 1 hour ago -
This is C++ code for parking fee management program
#include <iostream>
#include <iomanip>
using namespace std;...
asked 2 hours ago
ADVERTISEMENT