
Homework Answers
 step
response:
step
response:
clc;
clear all;
close all;
s=tf('s');
k=4.6;
g=(s+6)/((s+2)*(s+3)*(s+5));
gc=4.947*(s+6.7263);
step(feedback(k*g,1),feedback(g*gc,1))
legend('uncompensated system','compensated system')
 please
rate
please
rate
Add Answer to:
3. Nise(9.6) For a unity feedback system (s + 6) (s + 2)(s +3) (s +5) KG(s) G(s) Ts) a) Given a K-4.60, ζ;.707, on the 135° line, find the operating point on the root locus! NOTE: use the fact th...
2. Nise(9.6) For a unity feedback system KG(s) (s 6) G(s) T(s) (s 2)(s3)(s 5) 1...
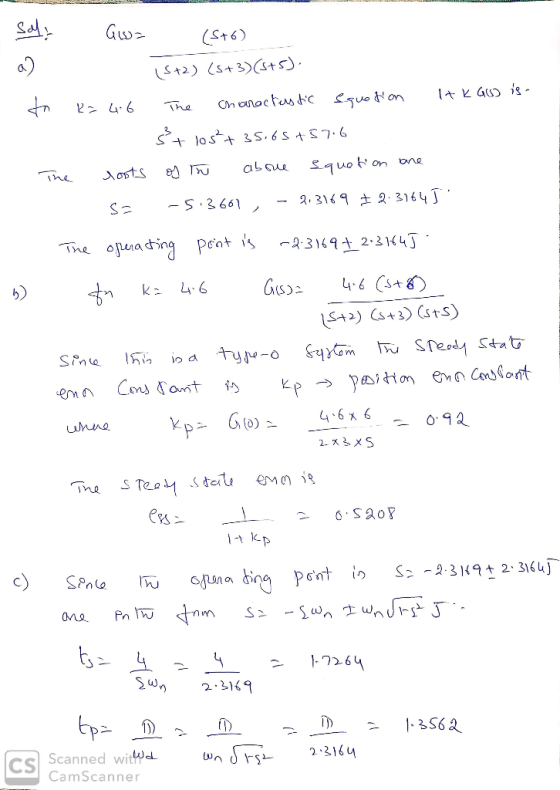
 2. Nise(9.6) For a unity feedback system KG(s) (s 6) G(s) T(s) (s 2)(s3)(s 5) 1 + KG(s) a) Given a K 4.60, .707, on the 135 line, find the operating point on the root locus NOTE: use the fact that 1 + KG(s) 0 at all points on the root locus, so K 1 and G(s)l 12(2k 1)180. Or use geometry using the point knowing that cose LKG(s) 1 = and a wn and b b) Find the steady...
2. Nise(9.6) For a unity feedback system KG(s) (s 6) G(s) T(s) (s 2)(s3)(s 5) 1 + KG(s) a) Given a K 4.60, .707, on the 135 line, find the operating point on the root locus NOTE: use the fact that 1 + KG(s) 0 at all points on the root locus, so K 1 and G(s)l 12(2k 1)180. Or use geometry using the point knowing that cose LKG(s) 1 = and a wn and b b) Find the steady...
2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) Ts)- 1+ KGS) G(s) (s +2)(s +3) (s +7) NOTE: the 10% overshoot line is 126.16" with a 7-59. a. Find the K value of the system at 10...
 2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) Ts)- 1+ KGS) G(s) (s +2)(s +3) (s +7) NOTE: the 10% overshoot line is 126.16" with a 7-59. a. Find the K value of the system at 10% OS if this corresponds to a point on the root locus of s-1.87+j2.56 NOTE: use the fact that 1 + KG(6) -0 at all points on the root locus,so K -() convert your G(s) to a exponential magnitude to...
2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) Ts)- 1+ KGS) G(s) (s +2)(s +3) (s +7) NOTE: the 10% overshoot line is 126.16" with a 7-59. a. Find the K value of the system at 10% OS if this corresponds to a point on the root locus of s-1.87+j2.56 NOTE: use the fact that 1 + KG(6) -0 at all points on the root locus,so K -() convert your G(s) to a exponential magnitude to...
1. Steady-State Error question Nise (7.13) For the system in Fig P7.4 find Kp, K,, Kg and state the system type 3) FIGURE P7.4 2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) 1 +KG...
 1. Steady-State Error question Nise (7.13) For the system in Fig P7.4 find Kp, K,, Kg and state the system type 3) FIGURE P7.4 2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) 1 +KG(s) NOTE: the 10% overshoot line is 126.16" with a (-59. a. Find the K value of the system at 10% OS if this corresponds to a point on the root locus of s-1.87+j2.56 NOTE: use the fact that 1 + KG(s)- 0...
1. Steady-State Error question Nise (7.13) For the system in Fig P7.4 find Kp, K,, Kg and state the system type 3) FIGURE P7.4 2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) 1 +KG(s) NOTE: the 10% overshoot line is 126.16" with a (-59. a. Find the K value of the system at 10% OS if this corresponds to a point on the root locus of s-1.87+j2.56 NOTE: use the fact that 1 + KG(s)- 0...
Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s...
 Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s)- s(s+3(s6) Design a lag compensation to meet the following specifications The step response settling time is to be less than 5 sec. . The step response overshoot is to be less than 17% . The steady-state error to a unit ramp input must not exceed 10%. Dynamic specifications (overshoot and settling time) can be met using proportional feedback, but a lag compensator is needed...
Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s)- s(s+3(s6) Design a lag compensation to meet the following specifications The step response settling time is to be less than 5 sec. . The step response overshoot is to be less than 17% . The steady-state error to a unit ramp input must not exceed 10%. Dynamic specifications (overshoot and settling time) can be met using proportional feedback, but a lag compensator is needed...
4) 3s points 11. Given the unity feedback system of Figure P9.1 with G(s) K (s + 6) do the following: [Section: 9.3 a. Sketch the root locus. b) Using the operating point of -3.2+j2.38 find the g...
 4) 3s points 11. Given the unity feedback system of Figure P9.1 with G(s) K (s + 6) do the following: [Section: 9.3 a. Sketch the root locus. b) Using the operating point of -3.2+j2.38 find the gain K. c) if the system is to be cascade-compensated so that T, -1 sec, find the compensator compensator zero is at -45. pole if the d) Sketch the root locus for the new compensated system.
4) 3s points 11. Given the unity...
4) 3s points 11. Given the unity feedback system of Figure P9.1 with G(s) K (s + 6) do the following: [Section: 9.3 a. Sketch the root locus. b) Using the operating point of -3.2+j2.38 find the gain K. c) if the system is to be cascade-compensated so that T, -1 sec, find the compensator compensator zero is at -45. pole if the d) Sketch the root locus for the new compensated system.
4) 3s points 11. Given the unity...
A plant with the transfer function Gp(s)-- with unity feedback has the root locus shown in the figure below: (s+2)(s+4) Root Locus 1.5 C(s) 0.5 0.5 1.5 .3 Real Axis (seconds) (a) Determine K of G...
 A plant with the transfer function Gp(s)-- with unity feedback has the root locus shown in the figure below: (s+2)(s+4) Root Locus 1.5 C(s) 0.5 0.5 1.5 .3 Real Axis (seconds) (a) Determine K of Gp(s) if it is desired that the uncompensated system has a 10% OS (overshoot) to a step input. (4 points) a 5% overshoot and a peak time Tp 3.1 meets the requirements described in part (b) and achieves zero steady state (b) Compute the desired...
A plant with the transfer function Gp(s)-- with unity feedback has the root locus shown in the figure below: (s+2)(s+4) Root Locus 1.5 C(s) 0.5 0.5 1.5 .3 Real Axis (seconds) (a) Determine K of Gp(s) if it is desired that the uncompensated system has a 10% OS (overshoot) to a step input. (4 points) a 5% overshoot and a peak time Tp 3.1 meets the requirements described in part (b) and achieves zero steady state (b) Compute the desired...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root lo...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
Please show calculations by HAND and NOT MATLAB. The answers are here to help. Thank you Note : Ts= 4/&*wn (&=damping ratio) Skill-Assessment Exercise 9.3 PROBLEM: A unity feedback system wit...
 Please show calculations by HAND and NOT MATLAB. The answers are
here to help. Thank you
Note : Ts= 4/&*wn (&=damping ratio)
Skill-Assessment Exercise 9.3 PROBLEM: A unity feedback system with forward transfer function 6) s(s + is operating with a closed-loop step response that has 20% overshoot. Do the following: a. Evaluate the settling time. b. Evaluate the steady-state error for a unit ramp input. c. Design a lag-lead compensator to decrease the settling time by 2 times and...
Please show calculations by HAND and NOT MATLAB. The answers are
here to help. Thank you
Note : Ts= 4/&*wn (&=damping ratio)
Skill-Assessment Exercise 9.3 PROBLEM: A unity feedback system with forward transfer function 6) s(s + is operating with a closed-loop step response that has 20% overshoot. Do the following: a. Evaluate the settling time. b. Evaluate the steady-state error for a unit ramp input. c. Design a lag-lead compensator to decrease the settling time by 2 times and...
Automatic Control In unity feedback system with Gs) (s-IXs-2) With out controller, is this system stable, and why? For Gc K (proportional control) sketch the root locus. Find the range of K to mak...
 Automatic Control
In unity feedback system with Gs) (s-IXs-2) With out controller, is this system stable, and why? For Gc K (proportional control) sketch the root locus. Find the range of K to make the system stable. Determine the range of K, so that the system has no overshoot Determine the range of K for steady state error to unit step input less than 20% a) b) c) d) e)
In unity feedback system with Gs) (s-IXs-2) With out controller,...
Automatic Control
In unity feedback system with Gs) (s-IXs-2) With out controller, is this system stable, and why? For Gc K (proportional control) sketch the root locus. Find the range of K to make the system stable. Determine the range of K, so that the system has no overshoot Determine the range of K for steady state error to unit step input less than 20% a) b) c) d) e)
In unity feedback system with Gs) (s-IXs-2) With out controller,...
3. (28 pts.) The unity feedback system with K(5+3) G(s) = (s + 1)(s + 4)(s...
 3. (28 pts.) The unity feedback system with K(5+3) G(s) = (s + 1)(s + 4)(s + 10) is operating with 12% overshoot ({=0.56). (a) the root locus plot is below, find the settling time (b) find ko (c) using frequency response techniques, design a lead compensator that will yield a twofold improvement in K, and a twofold reduction in settling time while keeping the overshoot at 12%; the Bode plot is below using the margin command and using the...
3. (28 pts.) The unity feedback system with K(5+3) G(s) = (s + 1)(s + 4)(s + 10) is operating with 12% overshoot ({=0.56). (a) the root locus plot is below, find the settling time (b) find ko (c) using frequency response techniques, design a lead compensator that will yield a twofold improvement in K, and a twofold reduction in settling time while keeping the overshoot at 12%; the Bode plot is below using the margin command and using the...
 2. Nise(9.6) For a unity feedback system KG(s) (s 6) G(s) T(s) (s 2)(s3)(s 5) 1 + KG(s) a) Given a K 4.60, .707, on the 135 line, find the operating point on the root locus NOTE: use the fact that 1 + KG(s) 0 at all points on the root locus, so K 1 and G(s)l 12(2k 1)180. Or use geometry using the point knowing that cose LKG(s) 1 = and a wn and b b) Find the steady...
2. Nise(9.6) For a unity feedback system KG(s) (s 6) G(s) T(s) (s 2)(s3)(s 5) 1 + KG(s) a) Given a K 4.60, .707, on the 135 line, find the operating point on the root locus NOTE: use the fact that 1 + KG(s) 0 at all points on the root locus, so K 1 and G(s)l 12(2k 1)180. Or use geometry using the point knowing that cose LKG(s) 1 = and a wn and b b) Find the steady...
 2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) Ts)- 1+ KGS) G(s) (s +2)(s +3) (s +7) NOTE: the 10% overshoot line is 126.16" with a 7-59. a. Find the K value of the system at 10% OS if this corresponds to a point on the root locus of s-1.87+j2.56 NOTE: use the fact that 1 + KG(6) -0 at all points on the root locus,so K -() convert your G(s) to a exponential magnitude to...
2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) Ts)- 1+ KGS) G(s) (s +2)(s +3) (s +7) NOTE: the 10% overshoot line is 126.16" with a 7-59. a. Find the K value of the system at 10% OS if this corresponds to a point on the root locus of s-1.87+j2.56 NOTE: use the fact that 1 + KG(6) -0 at all points on the root locus,so K -() convert your G(s) to a exponential magnitude to...
 1. Steady-State Error question Nise (7.13) For the system in Fig P7.4 find Kp, K,, Kg and state the system type 3) FIGURE P7.4 2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) 1 +KG(s) NOTE: the 10% overshoot line is 126.16" with a (-59. a. Find the K value of the system at 10% OS if this corresponds to a point on the root locus of s-1.87+j2.56 NOTE: use the fact that 1 + KG(s)- 0...
1. Steady-State Error question Nise (7.13) For the system in Fig P7.4 find Kp, K,, Kg and state the system type 3) FIGURE P7.4 2. Nise (9.3) For a unity feedback system with 10% OS: KG(s) 1 +KG(s) NOTE: the 10% overshoot line is 126.16" with a (-59. a. Find the K value of the system at 10% OS if this corresponds to a point on the root locus of s-1.87+j2.56 NOTE: use the fact that 1 + KG(s)- 0...
 Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s)- s(s+3(s6) Design a lag compensation to meet the following specifications The step response settling time is to be less than 5 sec. . The step response overshoot is to be less than 17% . The steady-state error to a unit ramp input must not exceed 10%. Dynamic specifications (overshoot and settling time) can be met using proportional feedback, but a lag compensator is needed...
Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s)- s(s+3(s6) Design a lag compensation to meet the following specifications The step response settling time is to be less than 5 sec. . The step response overshoot is to be less than 17% . The steady-state error to a unit ramp input must not exceed 10%. Dynamic specifications (overshoot and settling time) can be met using proportional feedback, but a lag compensator is needed...
 4) 3s points 11. Given the unity feedback system of Figure P9.1 with G(s) K (s + 6) do the following: [Section: 9.3 a. Sketch the root locus. b) Using the operating point of -3.2+j2.38 find the gain K. c) if the system is to be cascade-compensated so that T, -1 sec, find the compensator compensator zero is at -45. pole if the d) Sketch the root locus for the new compensated system.
4) 3s points 11. Given the unity...
4) 3s points 11. Given the unity feedback system of Figure P9.1 with G(s) K (s + 6) do the following: [Section: 9.3 a. Sketch the root locus. b) Using the operating point of -3.2+j2.38 find the gain K. c) if the system is to be cascade-compensated so that T, -1 sec, find the compensator compensator zero is at -45. pole if the d) Sketch the root locus for the new compensated system.
4) 3s points 11. Given the unity...
 A plant with the transfer function Gp(s)-- with unity feedback has the root locus shown in the figure below: (s+2)(s+4) Root Locus 1.5 C(s) 0.5 0.5 1.5 .3 Real Axis (seconds) (a) Determine K of Gp(s) if it is desired that the uncompensated system has a 10% OS (overshoot) to a step input. (4 points) a 5% overshoot and a peak time Tp 3.1 meets the requirements described in part (b) and achieves zero steady state (b) Compute the desired...
A plant with the transfer function Gp(s)-- with unity feedback has the root locus shown in the figure below: (s+2)(s+4) Root Locus 1.5 C(s) 0.5 0.5 1.5 .3 Real Axis (seconds) (a) Determine K of Gp(s) if it is desired that the uncompensated system has a 10% OS (overshoot) to a step input. (4 points) a 5% overshoot and a peak time Tp 3.1 meets the requirements described in part (b) and achieves zero steady state (b) Compute the desired...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
 Please show calculations by HAND and NOT MATLAB. The answers are
here to help. Thank you
Note : Ts= 4/&*wn (&=damping ratio)
Skill-Assessment Exercise 9.3 PROBLEM: A unity feedback system with forward transfer function 6) s(s + is operating with a closed-loop step response that has 20% overshoot. Do the following: a. Evaluate the settling time. b. Evaluate the steady-state error for a unit ramp input. c. Design a lag-lead compensator to decrease the settling time by 2 times and...
Please show calculations by HAND and NOT MATLAB. The answers are
here to help. Thank you
Note : Ts= 4/&*wn (&=damping ratio)
Skill-Assessment Exercise 9.3 PROBLEM: A unity feedback system with forward transfer function 6) s(s + is operating with a closed-loop step response that has 20% overshoot. Do the following: a. Evaluate the settling time. b. Evaluate the steady-state error for a unit ramp input. c. Design a lag-lead compensator to decrease the settling time by 2 times and...
 Automatic Control
In unity feedback system with Gs) (s-IXs-2) With out controller, is this system stable, and why? For Gc K (proportional control) sketch the root locus. Find the range of K to make the system stable. Determine the range of K, so that the system has no overshoot Determine the range of K for steady state error to unit step input less than 20% a) b) c) d) e)
In unity feedback system with Gs) (s-IXs-2) With out controller,...
Automatic Control
In unity feedback system with Gs) (s-IXs-2) With out controller, is this system stable, and why? For Gc K (proportional control) sketch the root locus. Find the range of K to make the system stable. Determine the range of K, so that the system has no overshoot Determine the range of K for steady state error to unit step input less than 20% a) b) c) d) e)
In unity feedback system with Gs) (s-IXs-2) With out controller,...
 3. (28 pts.) The unity feedback system with K(5+3) G(s) = (s + 1)(s + 4)(s + 10) is operating with 12% overshoot ({=0.56). (a) the root locus plot is below, find the settling time (b) find ko (c) using frequency response techniques, design a lead compensator that will yield a twofold improvement in K, and a twofold reduction in settling time while keeping the overshoot at 12%; the Bode plot is below using the margin command and using the...
3. (28 pts.) The unity feedback system with K(5+3) G(s) = (s + 1)(s + 4)(s + 10) is operating with 12% overshoot ({=0.56). (a) the root locus plot is below, find the settling time (b) find ko (c) using frequency response techniques, design a lead compensator that will yield a twofold improvement in K, and a twofold reduction in settling time while keeping the overshoot at 12%; the Bode plot is below using the margin command and using the...
Most questions answered within 3 hours.
-
Write a balanced chemical equation for the reaction between HCl
and NaOH. Be sure to include...
asked 42 seconds from now -
A 200 g mass is gently hung on a vertical spring which stretches
it 20cm before...
asked 1 minute ago -
A person wants to use a lever to lift a dumpster weighing 4700
N. The lever...
asked 3 minutes ago -
Hello,
Can you assist with the 2 part multiple choice question?
1A) Which of the following...
asked 18 minutes ago -
A municipal bond you are considering as an investment currently
pays a yield of 6.82 percent....
asked 23 minutes ago -
My Ebook is already expired. How could I keep using it since it
is very helpfull...
asked 31 minutes ago -
describe in detail your "perfect" place to study in your home
giving great detail to how...
asked 47 minutes ago -
Decide with a brief explanation of the following statements
about reaction rates and catalysis are true:...
asked 49 minutes ago -
Write a grading program in Java for a class with the following
grading policies: There are...
asked 51 minutes ago -
Can someone explain the process of this Display a text
file program and show the supposed...
asked 1 hour ago -
When a solid dissolves in water, heat may be evolved or
absorbed. The heat of dissolution...
asked 1 hour ago -
Leechtown Co. has 4.3 percent coupon bonds on the market with 18
years left to maturity....
asked 1 hour ago