
Homework Answers




Add Answer to:
4) 3s points 11. Given the unity feedback system of Figure P9.1 with G(s) K (s + 6) do the following: [Section: 9.3 a. Sketch the root locus. b) Using the operating point of -3.2+j2.38 find the g...
steps R(s) E(s) C(s) G(s) FIGURE P9.1 FIGURE P9.2 9. Consider the unity feedback system shown...
 steps
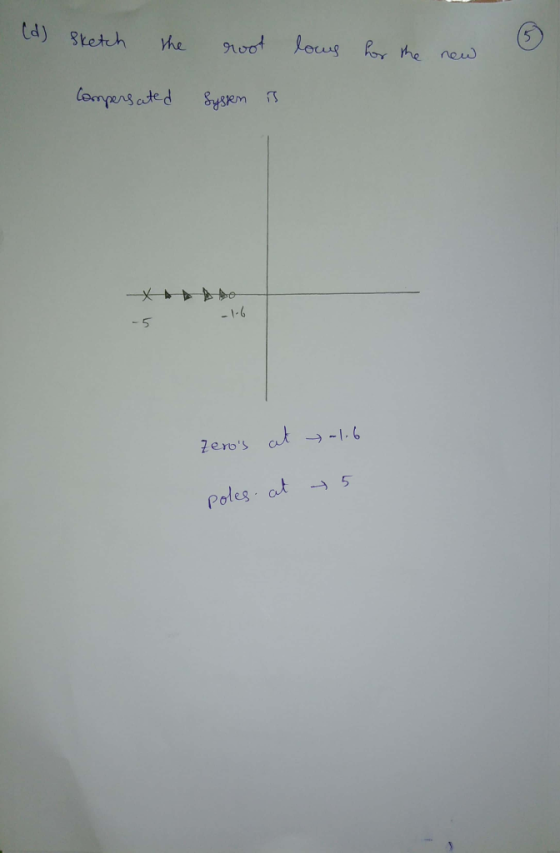
R(s) E(s) C(s) G(s) FIGURE P9.1 FIGURE P9.2 9. Consider the unity feedback system shown in Figure P9.1 with [Section: 9.3] K G(s) (s+4)3 a. Find the location of the dominant poles to yield a 1.6 second settling time and an overshoot of 25%. b. If a compensator with a zero at -1 is used to achieve the conditions of Part a, what must the angular contribution of the compensator pole be? c. Find the location of the compensator...
steps
R(s) E(s) C(s) G(s) FIGURE P9.1 FIGURE P9.2 9. Consider the unity feedback system shown in Figure P9.1 with [Section: 9.3] K G(s) (s+4)3 a. Find the location of the dominant poles to yield a 1.6 second settling time and an overshoot of 25%. b. If a compensator with a zero at -1 is used to achieve the conditions of Part a, what must the angular contribution of the compensator pole be? c. Find the location of the compensator...
Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s...
 Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s)- s(s+3(s6) Design a lag compensation to meet the following specifications The step response settling time is to be less than 5 sec. . The step response overshoot is to be less than 17% . The steady-state error to a unit ramp input must not exceed 10%. Dynamic specifications (overshoot and settling time) can be met using proportional feedback, but a lag compensator is needed...
Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s)- s(s+3(s6) Design a lag compensation to meet the following specifications The step response settling time is to be less than 5 sec. . The step response overshoot is to be less than 17% . The steady-state error to a unit ramp input must not exceed 10%. Dynamic specifications (overshoot and settling time) can be met using proportional feedback, but a lag compensator is needed...
A plant with the transfer function Gp(s)-- with unity feedback has the root locus shown in the figure below: (s+2)(s+4) Root Locus 1.5 C(s) 0.5 0.5 1.5 .3 Real Axis (seconds) (a) Determine K of G...
 A plant with the transfer function Gp(s)-- with unity feedback has the root locus shown in the figure below: (s+2)(s+4) Root Locus 1.5 C(s) 0.5 0.5 1.5 .3 Real Axis (seconds) (a) Determine K of Gp(s) if it is desired that the uncompensated system has a 10% OS (overshoot) to a step input. (4 points) a 5% overshoot and a peak time Tp 3.1 meets the requirements described in part (b) and achieves zero steady state (b) Compute the desired...
A plant with the transfer function Gp(s)-- with unity feedback has the root locus shown in the figure below: (s+2)(s+4) Root Locus 1.5 C(s) 0.5 0.5 1.5 .3 Real Axis (seconds) (a) Determine K of Gp(s) if it is desired that the uncompensated system has a 10% OS (overshoot) to a step input. (4 points) a 5% overshoot and a peak time Tp 3.1 meets the requirements described in part (b) and achieves zero steady state (b) Compute the desired...
I8. Consider the unity feedback system of Figure P9.1 with G(s) s +3)(s +5) . Show...
 I8. Consider the unity feedback system of Figure P9.1 with G(s) s +3)(s +5) . Show that the system cannot operate with a settling time of 2/3 second and a percent over- shoot of 1.5 % with a simple gain adjustment. b. Design a lead compensator so that the system meets the transient response characteristics of Part a.Specify the compensator's pole, zero, and the required gain. R) Cu) FIGURE P9.1
I8. Consider the unity feedback system of Figure P9.1 with G(s) s +3)(s +5) . Show that the system cannot operate with a settling time of 2/3 second and a percent over- shoot of 1.5 % with a simple gain adjustment. b. Design a lead compensator so that the system meets the transient response characteristics of Part a.Specify the compensator's pole, zero, and the required gain. R) Cu) FIGURE P9.1
22. For the unity feedback system given in Figure P9.1 with G(S) = 5(+ 5)(s +...
 22. For the unity feedback system given in Figure P9.1 with G(S) = 5(+ 5)(s + 11) do the following: [Section: 9.4] a. Find the gain, K, for the uncompensated system to operate with 30% overshoot. b. Find the peak time and K, for the uncompensated system, c. Design a lag-lead compensator to decrease the peak time by a factor of 2, decrease the percent overshoot by a factor of 2, and improve the steady-state error by a factor of...
22. For the unity feedback system given in Figure P9.1 with G(S) = 5(+ 5)(s + 11) do the following: [Section: 9.4] a. Find the gain, K, for the uncompensated system to operate with 30% overshoot. b. Find the peak time and K, for the uncompensated system, c. Design a lag-lead compensator to decrease the peak time by a factor of 2, decrease the percent overshoot by a factor of 2, and improve the steady-state error by a factor of...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
Please solve with detailed steps (NO MATLAB Solution).Thanks in advance 13. Consider the unity feedback system...
 Please solve with detailed steps (NO MATLAB
Solution).Thanks in advance
13. Consider the unity feedback system of Figure P9.1 with K G(s) s(s +20)(s +40) The system is operating at 20% overshoot. Design a compensator to decrease the settling time by a factor of 2 without affecting the percent overshoot and do the following: (Section: 9.3] a. Evaluate the uncompensated system's dominant poles, gain, and settling time. b. Evaluate the compensated system's dominant poles and settling time. c. Evaluate the...
Please solve with detailed steps (NO MATLAB
Solution).Thanks in advance
13. Consider the unity feedback system of Figure P9.1 with K G(s) s(s +20)(s +40) The system is operating at 20% overshoot. Design a compensator to decrease the settling time by a factor of 2 without affecting the percent overshoot and do the following: (Section: 9.3] a. Evaluate the uncompensated system's dominant poles, gain, and settling time. b. Evaluate the compensated system's dominant poles and settling time. c. Evaluate the...
3) (30 points) Find the range of K for the unity feedback system below, but also points and calculate any asymptotes & jw-crossing value. 14. Sketch the root locus and find the range of K for...
 3) (30 points) Find the range of K for the unity feedback system below, but also points and calculate any asymptotes & jw-crossing value. 14. Sketch the root locus and find the range of K for stability for the unity feedback system shown in Figure P8.3 for the following conditions: [Section: 8.5 G(s) = Ke-2+2) 1,
3) (30 points) Find the range of K for the unity feedback system below, but also points and calculate any asymptotes & jw-crossing value....
3) (30 points) Find the range of K for the unity feedback system below, but also points and calculate any asymptotes & jw-crossing value. 14. Sketch the root locus and find the range of K for stability for the unity feedback system shown in Figure P8.3 for the following conditions: [Section: 8.5 G(s) = Ke-2+2) 1,
3) (30 points) Find the range of K for the unity feedback system below, but also points and calculate any asymptotes & jw-crossing value....
Sketch the root locus of the unity feedback system shown in Figure P8.3, where G)(1s and...
 Sketch the root locus of the unity feedback system shown in Figure P8.3, where G)(1s and find the break-in and breakaway points. [Sec- tion: 8.5
Sketch the root locus of the unity feedback system shown in Figure P8.3, where G)(1s and find the break-in and breakaway points. [Sec- tion: 8.5
Problem (5): . The unity feedback system shown in Figure P9.1 with is operating with 10% overshoo...
 Problem (5): . The unity feedback system shown in Figure P9.1 with is operating with 10% overshoot [Section: 9 21 R. Whai is the value of the appropriate static error constant? b. Find the transfer function of a lag network so that the appropriale static error constant equals 4 without appreciably changing he dominant poles of the uncompensated system e. Use MATLAB or any other computer MATLAD progtam to si mulatcthe system o seethe effect of your compensator ML C(F)...
Problem (5): . The unity feedback system shown in Figure P9.1 with is operating with 10% overshoot [Section: 9 21 R. Whai is the value of the appropriate static error constant? b. Find the transfer function of a lag network so that the appropriale static error constant equals 4 without appreciably changing he dominant poles of the uncompensated system e. Use MATLAB or any other computer MATLAD progtam to si mulatcthe system o seethe effect of your compensator ML C(F)...
 steps
R(s) E(s) C(s) G(s) FIGURE P9.1 FIGURE P9.2 9. Consider the unity feedback system shown in Figure P9.1 with [Section: 9.3] K G(s) (s+4)3 a. Find the location of the dominant poles to yield a 1.6 second settling time and an overshoot of 25%. b. If a compensator with a zero at -1 is used to achieve the conditions of Part a, what must the angular contribution of the compensator pole be? c. Find the location of the compensator...
steps
R(s) E(s) C(s) G(s) FIGURE P9.1 FIGURE P9.2 9. Consider the unity feedback system shown in Figure P9.1 with [Section: 9.3] K G(s) (s+4)3 a. Find the location of the dominant poles to yield a 1.6 second settling time and an overshoot of 25%. b. If a compensator with a zero at -1 is used to achieve the conditions of Part a, what must the angular contribution of the compensator pole be? c. Find the location of the compensator...
 Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s)- s(s+3(s6) Design a lag compensation to meet the following specifications The step response settling time is to be less than 5 sec. . The step response overshoot is to be less than 17% . The steady-state error to a unit ramp input must not exceed 10%. Dynamic specifications (overshoot and settling time) can be met using proportional feedback, but a lag compensator is needed...
Lag Compensator Design Using Root-Locus 2. Consider the unity feedback system in Figure 1 for G(s)- s(s+3(s6) Design a lag compensation to meet the following specifications The step response settling time is to be less than 5 sec. . The step response overshoot is to be less than 17% . The steady-state error to a unit ramp input must not exceed 10%. Dynamic specifications (overshoot and settling time) can be met using proportional feedback, but a lag compensator is needed...
 A plant with the transfer function Gp(s)-- with unity feedback has the root locus shown in the figure below: (s+2)(s+4) Root Locus 1.5 C(s) 0.5 0.5 1.5 .3 Real Axis (seconds) (a) Determine K of Gp(s) if it is desired that the uncompensated system has a 10% OS (overshoot) to a step input. (4 points) a 5% overshoot and a peak time Tp 3.1 meets the requirements described in part (b) and achieves zero steady state (b) Compute the desired...
A plant with the transfer function Gp(s)-- with unity feedback has the root locus shown in the figure below: (s+2)(s+4) Root Locus 1.5 C(s) 0.5 0.5 1.5 .3 Real Axis (seconds) (a) Determine K of Gp(s) if it is desired that the uncompensated system has a 10% OS (overshoot) to a step input. (4 points) a 5% overshoot and a peak time Tp 3.1 meets the requirements described in part (b) and achieves zero steady state (b) Compute the desired...
 I8. Consider the unity feedback system of Figure P9.1 with G(s) s +3)(s +5) . Show that the system cannot operate with a settling time of 2/3 second and a percent over- shoot of 1.5 % with a simple gain adjustment. b. Design a lead compensator so that the system meets the transient response characteristics of Part a.Specify the compensator's pole, zero, and the required gain. R) Cu) FIGURE P9.1
I8. Consider the unity feedback system of Figure P9.1 with G(s) s +3)(s +5) . Show that the system cannot operate with a settling time of 2/3 second and a percent over- shoot of 1.5 % with a simple gain adjustment. b. Design a lead compensator so that the system meets the transient response characteristics of Part a.Specify the compensator's pole, zero, and the required gain. R) Cu) FIGURE P9.1
 22. For the unity feedback system given in Figure P9.1 with G(S) = 5(+ 5)(s + 11) do the following: [Section: 9.4] a. Find the gain, K, for the uncompensated system to operate with 30% overshoot. b. Find the peak time and K, for the uncompensated system, c. Design a lag-lead compensator to decrease the peak time by a factor of 2, decrease the percent overshoot by a factor of 2, and improve the steady-state error by a factor of...
22. For the unity feedback system given in Figure P9.1 with G(S) = 5(+ 5)(s + 11) do the following: [Section: 9.4] a. Find the gain, K, for the uncompensated system to operate with 30% overshoot. b. Find the peak time and K, for the uncompensated system, c. Design a lag-lead compensator to decrease the peak time by a factor of 2, decrease the percent overshoot by a factor of 2, and improve the steady-state error by a factor of...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain K as a variable s(s+4) (s2+4s+20)' Determine asymptotes, centroid,, breakaway point, angle of departure, and the gain at which root locus crosses jw -axis.
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain...
 Please solve with detailed steps (NO MATLAB
Solution).Thanks in advance
13. Consider the unity feedback system of Figure P9.1 with K G(s) s(s +20)(s +40) The system is operating at 20% overshoot. Design a compensator to decrease the settling time by a factor of 2 without affecting the percent overshoot and do the following: (Section: 9.3] a. Evaluate the uncompensated system's dominant poles, gain, and settling time. b. Evaluate the compensated system's dominant poles and settling time. c. Evaluate the...
Please solve with detailed steps (NO MATLAB
Solution).Thanks in advance
13. Consider the unity feedback system of Figure P9.1 with K G(s) s(s +20)(s +40) The system is operating at 20% overshoot. Design a compensator to decrease the settling time by a factor of 2 without affecting the percent overshoot and do the following: (Section: 9.3] a. Evaluate the uncompensated system's dominant poles, gain, and settling time. b. Evaluate the compensated system's dominant poles and settling time. c. Evaluate the...
 3) (30 points) Find the range of K for the unity feedback system below, but also points and calculate any asymptotes & jw-crossing value. 14. Sketch the root locus and find the range of K for stability for the unity feedback system shown in Figure P8.3 for the following conditions: [Section: 8.5 G(s) = Ke-2+2) 1,
3) (30 points) Find the range of K for the unity feedback system below, but also points and calculate any asymptotes & jw-crossing value....
3) (30 points) Find the range of K for the unity feedback system below, but also points and calculate any asymptotes & jw-crossing value. 14. Sketch the root locus and find the range of K for stability for the unity feedback system shown in Figure P8.3 for the following conditions: [Section: 8.5 G(s) = Ke-2+2) 1,
3) (30 points) Find the range of K for the unity feedback system below, but also points and calculate any asymptotes & jw-crossing value....
 Sketch the root locus of the unity feedback system shown in Figure P8.3, where G)(1s and find the break-in and breakaway points. [Sec- tion: 8.5
Sketch the root locus of the unity feedback system shown in Figure P8.3, where G)(1s and find the break-in and breakaway points. [Sec- tion: 8.5
 Problem (5): . The unity feedback system shown in Figure P9.1 with is operating with 10% overshoot [Section: 9 21 R. Whai is the value of the appropriate static error constant? b. Find the transfer function of a lag network so that the appropriale static error constant equals 4 without appreciably changing he dominant poles of the uncompensated system e. Use MATLAB or any other computer MATLAD progtam to si mulatcthe system o seethe effect of your compensator ML C(F)...
Problem (5): . The unity feedback system shown in Figure P9.1 with is operating with 10% overshoot [Section: 9 21 R. Whai is the value of the appropriate static error constant? b. Find the transfer function of a lag network so that the appropriale static error constant equals 4 without appreciably changing he dominant poles of the uncompensated system e. Use MATLAB or any other computer MATLAD progtam to si mulatcthe system o seethe effect of your compensator ML C(F)...
Most questions answered within 3 hours.
-
Hi, please help
1)Draw two molecules that could hydrogen bond with each other.
Draw and indicate...
asked 1 minute ago -
Using Java, I created 3 files, Pizza,PizzaOrder, and
PizzaOrder_Demo that I attached down below. But I...
asked 20 seconds ago -
a. An 8-bit successive approximation ADC has a reference voltage
of 10 V. Calculate the resolution...
asked 10 minutes ago -
The distance between the two hydrogen nuclei in the H2 molecule
is 110 pm (picometer). How...
asked 12 minutes ago -
write an article about drone effect on
construction safety.
asked 15 minutes ago -
Consider the following data for a dependent variable y and two
independent variables, x1 and x2....
asked 1 hour ago -
what is the most likely shape for a distribution with a mean of
40 and a...
asked 26 minutes ago -
The work function, Φ0 (or W0), for cesium is 3.43×10−19 J. The
frequency of a photon...
asked 32 minutes ago -
18.54----At the surface of Venus the average temperature is a
balmy 460 ∘C due to the...
asked 31 minutes ago -
#1. A food has been ingested. Identify all of the anatomic
structures and substructures it travels...
asked 24 minutes ago -
Grommit Engineering expects to have net income next year of $
29.71 million and free cash...
asked 33 minutes ago -
A bowling ball (solid sphere) of mass 5.0 kg and
radius of 11cm. What is theangular...
asked 38 minutes ago