Can you Solve in matlab please. I need your help
Homework Answers
 1)matlab code and result
1)matlab code and result
clear;clc;
%%
s=tf('s');
G=1/(s*(s^2+4*s+5));%open loop transfer function
zeta=0.5;
figure(1)
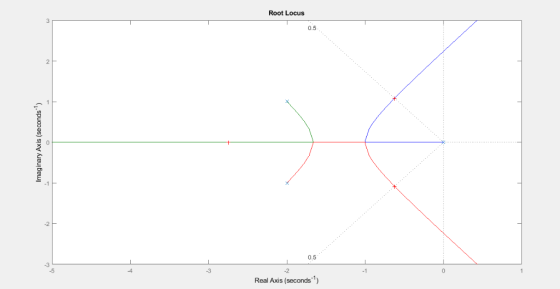
rlocus(G);
sgrid([0.5],[]);
[k,p]=rlocfind(G);%select a point where zeta=0.5 line cut
rootlocus
disp(['value of k at zeta=0.5 K=',num2str(k)]);
disp('closed loop ploe at zeta=0.5');
disp(p);
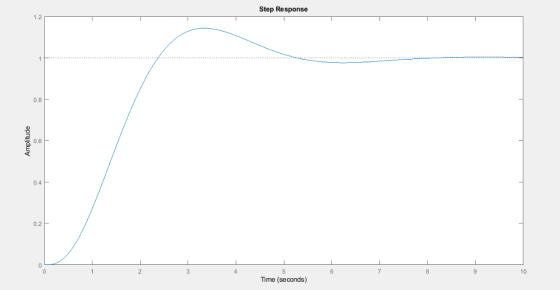
T=feedback(k*G,1);%close loop transfer function
figure(2)
step(T);
2)matlab result
Select a point in the graphics window
selected_point =
-0.6262 + 1.0829i
value of k at zeta=0.5 K=4.2956
closed loop ploe at zeta=0.5
-2.7498 + 0.0000i
-0.6251 + 1.0823i
-0.6251 - 1.0823i
Add Answer to:
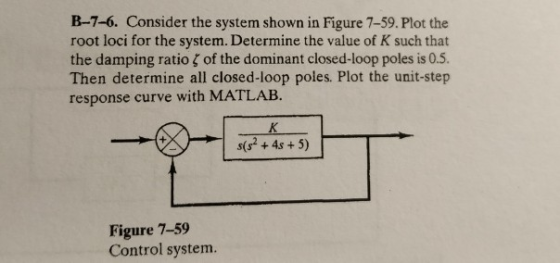
Can you Solve in matlab please. I need your help B-7-6. Consider the system shown in Figure 7-59. Plot the root loci for the system. Determine the value of K such that the damping ratio ζ of the d...
control system Problem 1) Consider the system shown in the figure. Plot the root loci. Locate...
 control system
Problem 1) Consider the system shown in the figure. Plot the root loci. Locate the closed-loop poles when the gain K-2. R(s) C(s) s + 1 s(s2+ 2s + 6) S+I Figure 1: Control System
control system
Problem 1) Consider the system shown in the figure. Plot the root loci. Locate the closed-loop poles when the gain K-2. R(s) C(s) s + 1 s(s2+ 2s + 6) S+I Figure 1: Control System
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the d...
 3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
1. Write the MATLAB commands (tf.) and zpk (...)) that yield the following trans fer functions:...
 1. Write the MATLAB commands (tf.) and zpk (...)) that yield the following trans fer functions: ii) Hy=1+1+ ii) H3-3-*+-1 (s + 1)( -2) iv) H. - 3)(8 + 4) 2. Consider the feedback system: C(0) = K * G(s) Determine the values of K, a, and b of C(s) such that the dominant-closed loop poles are located at $12 = -1 j. Use the root locus method. Provide the locations of the dominant poles. You should include the root...
1. Write the MATLAB commands (tf.) and zpk (...)) that yield the following trans fer functions: ii) Hy=1+1+ ii) H3-3-*+-1 (s + 1)( -2) iv) H. - 3)(8 + 4) 2. Consider the feedback system: C(0) = K * G(s) Determine the values of K, a, and b of C(s) such that the dominant-closed loop poles are located at $12 = -1 j. Use the root locus method. Provide the locations of the dominant poles. You should include the root...
Please solve part b and c and d !! Consider the closed loop system shown in...
 Please solve part b and c and d !!
Consider the closed loop system shown in Figure 4. The root locus of that system is shown in Figure 5 (s+40s+8) R(s) Y(s) Figure 4 System block diagram of Problem 4 a) On the root locus plot, sketch the region of possible roots of the dominant closed-loop poles such that the system response to a unit step has the following time domain specifications. [5] i. Damping ratio, 20.76 ii. Natural frequency,....
Please solve part b and c and d !!
Consider the closed loop system shown in Figure 4. The root locus of that system is shown in Figure 5 (s+40s+8) R(s) Y(s) Figure 4 System block diagram of Problem 4 a) On the root locus plot, sketch the region of possible roots of the dominant closed-loop poles such that the system response to a unit step has the following time domain specifications. [5] i. Damping ratio, 20.76 ii. Natural frequency,....
Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer fun...
 Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer function of V(s)/R(s) when Gc(s)-1 2) Derive the closed-loop transfer function of E(s)/R(s) when Ge(s)-1 3) Plot the time history of the error e(t) of the closed-loop system when r(t) is a unit step input. 4) Plot the root-loci of the uncompensated system (when Gc(s)-1). Mark the closed-loop complex poles on...
Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer function of V(s)/R(s) when Gc(s)-1 2) Derive the closed-loop transfer function of E(s)/R(s) when Ge(s)-1 3) Plot the time history of the error e(t) of the closed-loop system when r(t) is a unit step input. 4) Plot the root-loci of the uncompensated system (when Gc(s)-1). Mark the closed-loop complex poles on...
Control System 3) Consider the simplified form of the transfer function for position servomechanism used in an antenna tracking system as shown in Figure Q3. By using root locus technique: Error Els)...
 Control System
3) Consider the simplified form of the transfer function for position servomechanism used in an antenna tracking system as shown in Figure Q3. By using root locus technique: Error Els) C(s) R(s)+ s2 +4S +5 2.56S +12.8 Figure Q3 (a) Sketch its root locus (11 marks) (b) Find the value of K so that the damping ratio 0.342, and give all closed loop poles for the value of K. (9 marks)
3) Consider the simplified form of the...
Control System
3) Consider the simplified form of the transfer function for position servomechanism used in an antenna tracking system as shown in Figure Q3. By using root locus technique: Error Els) C(s) R(s)+ s2 +4S +5 2.56S +12.8 Figure Q3 (a) Sketch its root locus (11 marks) (b) Find the value of K so that the damping ratio 0.342, and give all closed loop poles for the value of K. (9 marks)
3) Consider the simplified form of the...
Please solve parts (a) and (b) neatly and show problem solving. Ignore reference to part 1, but please still plot the root loci. For the system given in Figure 1 a) Design a PD compensator with the t...
 Please solve parts (a) and (b) neatly and show problem solving.
Ignore reference to part 1, but please still plot the root
loci.
For the system given in Figure 1 a) Design a PD compensator with the transfer function: to give a dominant root of the closed-loop characteristic equation of the compen- sated system at s -1+j1 (i.e., a settling time Ts of less than 6 seconds and a maximum overshoot Mo of less than 10%). Required Pre-Practical work] (b)...
Please solve parts (a) and (b) neatly and show problem solving.
Ignore reference to part 1, but please still plot the root
loci.
For the system given in Figure 1 a) Design a PD compensator with the transfer function: to give a dominant root of the closed-loop characteristic equation of the compen- sated system at s -1+j1 (i.e., a settling time Ts of less than 6 seconds and a maximum overshoot Mo of less than 10%). Required Pre-Practical work] (b)...
1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root...
 1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
Matlab needs to be done by matlab Create a root locus plot to determine design a...
 Matlab
needs to be done by matlab
Create a root locus plot to determine design a control system for the following system which has a standard negative unity feedback system. G(s) = K (s2 - 4s +20)/[(s+2)(s+4)] Damping ratio goal for the control system gain K is to maintain a 45% damping ratio, or zeta = 0.45. Select the gain, K, using the root locus software. O 0.211 O 0.417 0.987 O 1.97 At what gain K does the system...
Matlab
needs to be done by matlab
Create a root locus plot to determine design a control system for the following system which has a standard negative unity feedback system. G(s) = K (s2 - 4s +20)/[(s+2)(s+4)] Damping ratio goal for the control system gain K is to maintain a 45% damping ratio, or zeta = 0.45. Select the gain, K, using the root locus software. O 0.211 O 0.417 0.987 O 1.97 At what gain K does the system...
% MATLAB allows root loci to be plotted with the % rlocus(GH) command, where G(s)H(s) =...
 % MATLAB allows root loci to be plotted with the
% rlocus(GH) command, where G(s)H(s) = numgh/dengh and GH is an
LTI transfer-
% function object. Points on the root locus can be selected
interactively
% using [K,p] = rlocfind(GH) command. MATLAB yields gain(K)
at
% that point as well as all other poles(p) that have that gain.
We can zoom
% in and out of root locus by changing range of axis values
using
% command axis([xmin,xmax,ymin,ymax]). root locus...
% MATLAB allows root loci to be plotted with the
% rlocus(GH) command, where G(s)H(s) = numgh/dengh and GH is an
LTI transfer-
% function object. Points on the root locus can be selected
interactively
% using [K,p] = rlocfind(GH) command. MATLAB yields gain(K)
at
% that point as well as all other poles(p) that have that gain.
We can zoom
% in and out of root locus by changing range of axis values
using
% command axis([xmin,xmax,ymin,ymax]). root locus...
 control system
Problem 1) Consider the system shown in the figure. Plot the root loci. Locate the closed-loop poles when the gain K-2. R(s) C(s) s + 1 s(s2+ 2s + 6) S+I Figure 1: Control System
control system
Problem 1) Consider the system shown in the figure. Plot the root loci. Locate the closed-loop poles when the gain K-2. R(s) C(s) s + 1 s(s2+ 2s + 6) S+I Figure 1: Control System
 3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot and determine the K value such that the damping ratio of a pair of dominant complex-conjugate closed-loop poles is 0.5. Ri)1 C(s)
3. Consider the system shown below. For this system. G(s) s(s+1)(s 2) H(s)1 We assume that the value of the gain K is nonnegative. Sketch the root locus plot...
 1. Write the MATLAB commands (tf.) and zpk (...)) that yield the following trans fer functions: ii) Hy=1+1+ ii) H3-3-*+-1 (s + 1)( -2) iv) H. - 3)(8 + 4) 2. Consider the feedback system: C(0) = K * G(s) Determine the values of K, a, and b of C(s) such that the dominant-closed loop poles are located at $12 = -1 j. Use the root locus method. Provide the locations of the dominant poles. You should include the root...
1. Write the MATLAB commands (tf.) and zpk (...)) that yield the following trans fer functions: ii) Hy=1+1+ ii) H3-3-*+-1 (s + 1)( -2) iv) H. - 3)(8 + 4) 2. Consider the feedback system: C(0) = K * G(s) Determine the values of K, a, and b of C(s) such that the dominant-closed loop poles are located at $12 = -1 j. Use the root locus method. Provide the locations of the dominant poles. You should include the root...
 Please solve part b and c and d !!
Consider the closed loop system shown in Figure 4. The root locus of that system is shown in Figure 5 (s+40s+8) R(s) Y(s) Figure 4 System block diagram of Problem 4 a) On the root locus plot, sketch the region of possible roots of the dominant closed-loop poles such that the system response to a unit step has the following time domain specifications. [5] i. Damping ratio, 20.76 ii. Natural frequency,....
Please solve part b and c and d !!
Consider the closed loop system shown in Figure 4. The root locus of that system is shown in Figure 5 (s+40s+8) R(s) Y(s) Figure 4 System block diagram of Problem 4 a) On the root locus plot, sketch the region of possible roots of the dominant closed-loop poles such that the system response to a unit step has the following time domain specifications. [5] i. Damping ratio, 20.76 ii. Natural frequency,....
 Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer function of V(s)/R(s) when Gc(s)-1 2) Derive the closed-loop transfer function of E(s)/R(s) when Ge(s)-1 3) Plot the time history of the error e(t) of the closed-loop system when r(t) is a unit step input. 4) Plot the root-loci of the uncompensated system (when Gc(s)-1). Mark the closed-loop complex poles on...
Consider the automobile cruise-control system shown below: Engine ActuatorCarburetor 0.833 and load 40 3s +1 Compensator R(s)E(s) Ge(s) s +1 -t e(t) Sensor 0.03 1) Derive the closed-loop transfer function of V(s)/R(s) when Gc(s)-1 2) Derive the closed-loop transfer function of E(s)/R(s) when Ge(s)-1 3) Plot the time history of the error e(t) of the closed-loop system when r(t) is a unit step input. 4) Plot the root-loci of the uncompensated system (when Gc(s)-1). Mark the closed-loop complex poles on...
 Control System
3) Consider the simplified form of the transfer function for position servomechanism used in an antenna tracking system as shown in Figure Q3. By using root locus technique: Error Els) C(s) R(s)+ s2 +4S +5 2.56S +12.8 Figure Q3 (a) Sketch its root locus (11 marks) (b) Find the value of K so that the damping ratio 0.342, and give all closed loop poles for the value of K. (9 marks)
3) Consider the simplified form of the...
Control System
3) Consider the simplified form of the transfer function for position servomechanism used in an antenna tracking system as shown in Figure Q3. By using root locus technique: Error Els) C(s) R(s)+ s2 +4S +5 2.56S +12.8 Figure Q3 (a) Sketch its root locus (11 marks) (b) Find the value of K so that the damping ratio 0.342, and give all closed loop poles for the value of K. (9 marks)
3) Consider the simplified form of the...
 Please solve parts (a) and (b) neatly and show problem solving.
Ignore reference to part 1, but please still plot the root
loci.
For the system given in Figure 1 a) Design a PD compensator with the transfer function: to give a dominant root of the closed-loop characteristic equation of the compen- sated system at s -1+j1 (i.e., a settling time Ts of less than 6 seconds and a maximum overshoot Mo of less than 10%). Required Pre-Practical work] (b)...
Please solve parts (a) and (b) neatly and show problem solving.
Ignore reference to part 1, but please still plot the root
loci.
For the system given in Figure 1 a) Design a PD compensator with the transfer function: to give a dominant root of the closed-loop characteristic equation of the compen- sated system at s -1+j1 (i.e., a settling time Ts of less than 6 seconds and a maximum overshoot Mo of less than 10%). Required Pre-Practical work] (b)...
 1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
1. Using the MATLAB rltool command (or rlocus and rlocfind), plot the K > 0 root locus for What is the value of the largest damping ra- 2+2s+1 s(s120)7,7 -2,12). 1 + KL(s) = 0, where L(s) = tio associated with the pair of complex poles? At which value of K is it achieved? Turn in a printout of your plot showing the location of the poles on the damping ratio line that you found. 2. Suppose the unity feedback...
 Matlab
needs to be done by matlab
Create a root locus plot to determine design a control system for the following system which has a standard negative unity feedback system. G(s) = K (s2 - 4s +20)/[(s+2)(s+4)] Damping ratio goal for the control system gain K is to maintain a 45% damping ratio, or zeta = 0.45. Select the gain, K, using the root locus software. O 0.211 O 0.417 0.987 O 1.97 At what gain K does the system...
Matlab
needs to be done by matlab
Create a root locus plot to determine design a control system for the following system which has a standard negative unity feedback system. G(s) = K (s2 - 4s +20)/[(s+2)(s+4)] Damping ratio goal for the control system gain K is to maintain a 45% damping ratio, or zeta = 0.45. Select the gain, K, using the root locus software. O 0.211 O 0.417 0.987 O 1.97 At what gain K does the system...
 % MATLAB allows root loci to be plotted with the
% rlocus(GH) command, where G(s)H(s) = numgh/dengh and GH is an
LTI transfer-
% function object. Points on the root locus can be selected
interactively
% using [K,p] = rlocfind(GH) command. MATLAB yields gain(K)
at
% that point as well as all other poles(p) that have that gain.
We can zoom
% in and out of root locus by changing range of axis values
using
% command axis([xmin,xmax,ymin,ymax]). root locus...
% MATLAB allows root loci to be plotted with the
% rlocus(GH) command, where G(s)H(s) = numgh/dengh and GH is an
LTI transfer-
% function object. Points on the root locus can be selected
interactively
% using [K,p] = rlocfind(GH) command. MATLAB yields gain(K)
at
% that point as well as all other poles(p) that have that gain.
We can zoom
% in and out of root locus by changing range of axis values
using
% command axis([xmin,xmax,ymin,ymax]). root locus...
Most questions answered within 3 hours.
-
The charge to the left in the figure above has a
magnitude of 2.90 nC, and...
asked 30 minutes ago -
Verify the MIRR is 9.29% given cash flows in years 1 and 2 of
$1,000 each,...
asked 1 hour ago -
Calculate the pH of a 5.7 M solution of aniline (C6H5NH2; Kb =
3.8 x 10^-10)
asked 3 hours ago -
LSL R3, R3, R12
Memory
Address
Orig.
Data
Updated
Data
Register
Orig.
Data
Updated
Data
0x84F0...
asked 3 hours ago -
Air at 100 kPa and density of 1.2 kg/m3 flows upward through a
5-cm diameter inclined...
asked 3 hours ago -
Define the following concepts in your own words: (a) stiffness,
(b) strength, (c) strain,
(d) ductility,...
asked 4 hours ago -
In C++
In this homework, you will be tasked with creating functions to
manipulate strings that...
asked 4 hours ago -
An isolated colony represents a pure culture. one rare occasions
, however , a colony can...
asked 5 hours ago -
*****DO NOT ANSWER THIS QUESTION IF YOU DON'T
KNOW*******Rights and Duties of Auditors; Minimum 4000
words...
asked 6 hours ago -
The probability that Janie is wearing sunglasses is 1/4. The
probability that she is wearing sunglasses...
asked 6 hours ago -
Do you believe social media is more of a help or a hindrance in
controlling crises...
asked 6 hours ago -
Two long, parallel wires separated by 2.85 cm carry currents in
opposite directions. The current in...
asked 6 hours ago