
Can someone help me with problem 4? You dont need to find the answers for problem 6. Just use the transfer function from problem 6 to do problem 4.
Homework Answers
4.
a) & b) matlab code:
s=tf('s');
g=1/(s*(s+2)*(s+10));
rlocus(g)
axis([-5 5 -5 5])
 c)
c)
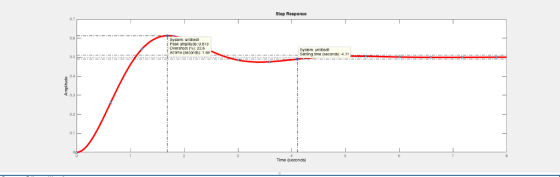
 d) K = 21.5
d) K = 21.5
s=tf('s');
g=21.5/(s*(s+2)*(s+10));
step(feedback(g,1))
 e) &f) second order
approximation:
e) &f) second order
approximation:
g =
2.085
---------------------
s^2 + 1.746 s + 2.085
s=tf('s');
g=2.04/((s+0.873+1.15i)*(s+0.873-1.15i));
step(feedback(g,1))
Add Answer to:
Can someone help me with problem 4? You dont need to find the
answers for problem...
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3 s+7) the complex poles. G(s) (s +3) i) Determine the joo -axis crossing, breakaway point and the...
 Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3 s+7) the complex poles. G(s) (s +3) i) Determine the joo -axis crossing, breakaway point and the angle of departure from (i) Determine the value of the gain for which the closed loop system will have a pole at (-10)
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3...
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3 s+7) the complex poles. G(s) (s +3) i) Determine the joo -axis crossing, breakaway point and the angle of departure from (i) Determine the value of the gain for which the closed loop system will have a pole at (-10)
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+2...
 Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
I need help with this, provide clear answers, please. Thanks in advance. By gain compensation, the...
 I need help with this, provide clear answers, please. Thanks in
advance.
By gain compensation, the following system operates with a 19.3% overshoot when K- 281.69, Design a lead compensator to reduce the percentage overshoot to 10% and reduce the settling time by 1 sec. R(s) C(s) 4 +6)s +8) (c) Fill out the table below. (d) Simulate the step response to validate if the design goal is met. Compensated system with the lead compensator Uncompensated system Overall gain Dominant...
I need help with this, provide clear answers, please. Thanks in
advance.
By gain compensation, the following system operates with a 19.3% overshoot when K- 281.69, Design a lead compensator to reduce the percentage overshoot to 10% and reduce the settling time by 1 sec. R(s) C(s) 4 +6)s +8) (c) Fill out the table below. (d) Simulate the step response to validate if the design goal is met. Compensated system with the lead compensator Uncompensated system Overall gain Dominant...
4. A lead compensator with a transfer function Ge(s) = K(s+0.5)/(s+3) has been designed for a...
 4. A lead compensator with a transfer function Ge(s) = K(s+0.5)/(s+3) has been designed for a Space vehicle with the transfer function 1/s? such that at the dominant closed loop poles are located at -1 +/-jl. (1) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. (iii) What...
4. A lead compensator with a transfer function Ge(s) = K(s+0.5)/(s+3) has been designed for a Space vehicle with the transfer function 1/s? such that at the dominant closed loop poles are located at -1 +/-jl. (1) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. (iii) What...
4. A lead compensator with a transfer function Ge(s)=K(+0.5/(s+3) has been designed for a Space vehicle...
 4. A lead compensator with a transfer function Ge(s)=K(+0.5/(s+3) has been designed for a Space vehicle with the transfer function 1/s' such that at the dominant closed loop poles are located at -1 +/-j1. (0) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. What value of K...
4. A lead compensator with a transfer function Ge(s)=K(+0.5/(s+3) has been designed for a Space vehicle with the transfer function 1/s' such that at the dominant closed loop poles are located at -1 +/-j1. (0) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. What value of K...
K(z-15). Connected in the Assume a system, G[2]-z-ls, conventional negative unity, output feedbac...
 Need help with this. Please show all your steps.
K(z-15). Connected in the Assume a system, G[2]-z-ls, conventional negative unity, output feedback configuration. The only adjustable parameter in the Pl controller for this problem is the gain. (a) Find the real axis line segments in the complex z-plane that belong to the Root Locus 5. and a PI controller, C[z] associated with the closed-loop poles of this system. The Root Locus is drawn for the forward gain in the system...
Need help with this. Please show all your steps.
K(z-15). Connected in the Assume a system, G[2]-z-ls, conventional negative unity, output feedback configuration. The only adjustable parameter in the Pl controller for this problem is the gain. (a) Find the real axis line segments in the complex z-plane that belong to the Root Locus 5. and a PI controller, C[z] associated with the closed-loop poles of this system. The Root Locus is drawn for the forward gain in the system...
% We can couple the design of gain on the root locus with a % step-response...
 % We can couple the design of gain on the root locus with a
% step-response simulation for the gain selected. We introduce
the command
% rlocus(G,K), which allows us to specify the range of gain, K,
for plotting the root
% locus. This command will help us smooth the usual root locus
plot by equivalently
% specifying more points via the argument, K. Notice that the
first root locus
% plotted without the argument K is not smooth. We...
% We can couple the design of gain on the root locus with a
% step-response simulation for the gain selected. We introduce
the command
% rlocus(G,K), which allows us to specify the range of gain, K,
for plotting the root
% locus. This command will help us smooth the usual root locus
plot by equivalently
% specifying more points via the argument, K. Notice that the
first root locus
% plotted without the argument K is not smooth. We...
Consider the sontrol system shown in the figure below: R(S) + E(s) C(s) K (s +...
 Consider the sontrol system shown in the figure below: R(S) + E(s) C(s) K (s + 4)(s + 6) g) Sketch the uncompensated system root locus showing all details. (5 Points) h) Find the dominant closed loop poles of the uncompensated system to operate with a 16.3% overshoot and peak time tp = 0.7255 (make sure to show this point on the Root Locus) (5 Points) (s+z) Now we want to design a PI compensator of the form to increase...
Consider the sontrol system shown in the figure below: R(S) + E(s) C(s) K (s + 4)(s + 6) g) Sketch the uncompensated system root locus showing all details. (5 Points) h) Find the dominant closed loop poles of the uncompensated system to operate with a 16.3% overshoot and peak time tp = 0.7255 (make sure to show this point on the Root Locus) (5 Points) (s+z) Now we want to design a PI compensator of the form to increase...
Problem 5. (20pts) The open-loop transfer function of a unity feedback system G(8) -- +2) a)...
 Problem 5. (20pts) The open-loop transfer function of a unity feedback system G(8) -- +2) a) Locate open-loop zeros and open-loop poles. b) Construct the root-locus diagram as 0 <K <oo. Mark the portions of the real axis that belong to the root locus - Mark with K =0 the point where the root locus bra O the point where the root locus branches start and with K = oo the point where the branches end. - Find break-away and/or...
Problem 5. (20pts) The open-loop transfer function of a unity feedback system G(8) -- +2) a) Locate open-loop zeros and open-loop poles. b) Construct the root-locus diagram as 0 <K <oo. Mark the portions of the real axis that belong to the root locus - Mark with K =0 the point where the root locus bra O the point where the root locus branches start and with K = oo the point where the branches end. - Find break-away and/or...
2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations...
 2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations of open-loop poles with X and zeros with O on an s-plane. b. Find the number of segments in the root locus diagram based on the number of poles and zeros. c. The breakaway point (the point at which the two real poles meet and diverge to become complex conjugates) occurs when K = 0.02276. Show that the closed-loop system has repeated poles for...
2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations of open-loop poles with X and zeros with O on an s-plane. b. Find the number of segments in the root locus diagram based on the number of poles and zeros. c. The breakaway point (the point at which the two real poles meet and diverge to become complex conjugates) occurs when K = 0.02276. Show that the closed-loop system has repeated poles for...
 Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3 s+7) the complex poles. G(s) (s +3) i) Determine the joo -axis crossing, breakaway point and the angle of departure from (i) Determine the value of the gain for which the closed loop system will have a pole at (-10)
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3...
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3 s+7) the complex poles. G(s) (s +3) i) Determine the joo -axis crossing, breakaway point and the angle of departure from (i) Determine the value of the gain for which the closed loop system will have a pole at (-10)
Problem (4): Sketch the root locus plot for a system, whose transfer function are given by 10 K (s2 +3...
 Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
Question# 1 (25 points) For a unity feedback system with open loop transfer function K(s+10)(s+20) (s+30)(s2-20s+200) G(s) = Do the following using Matlab: a) Sketch the root locus. b) Find the range of gain, K that makes the system stable c) Find the value of K that yields a damping ratio of 0.707 for the system's closed-loop dominant poles. d) Obtain Ts, Tp, %OS for the closed loop system in part c). e) Find the value of K that yields...
 I need help with this, provide clear answers, please. Thanks in
advance.
By gain compensation, the following system operates with a 19.3% overshoot when K- 281.69, Design a lead compensator to reduce the percentage overshoot to 10% and reduce the settling time by 1 sec. R(s) C(s) 4 +6)s +8) (c) Fill out the table below. (d) Simulate the step response to validate if the design goal is met. Compensated system with the lead compensator Uncompensated system Overall gain Dominant...
I need help with this, provide clear answers, please. Thanks in
advance.
By gain compensation, the following system operates with a 19.3% overshoot when K- 281.69, Design a lead compensator to reduce the percentage overshoot to 10% and reduce the settling time by 1 sec. R(s) C(s) 4 +6)s +8) (c) Fill out the table below. (d) Simulate the step response to validate if the design goal is met. Compensated system with the lead compensator Uncompensated system Overall gain Dominant...
 4. A lead compensator with a transfer function Ge(s) = K(s+0.5)/(s+3) has been designed for a Space vehicle with the transfer function 1/s? such that at the dominant closed loop poles are located at -1 +/-jl. (1) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. (iii) What...
4. A lead compensator with a transfer function Ge(s) = K(s+0.5)/(s+3) has been designed for a Space vehicle with the transfer function 1/s? such that at the dominant closed loop poles are located at -1 +/-jl. (1) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. (iii) What...
 4. A lead compensator with a transfer function Ge(s)=K(+0.5/(s+3) has been designed for a Space vehicle with the transfer function 1/s' such that at the dominant closed loop poles are located at -1 +/-j1. (0) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. What value of K...
4. A lead compensator with a transfer function Ge(s)=K(+0.5/(s+3) has been designed for a Space vehicle with the transfer function 1/s' such that at the dominant closed loop poles are located at -1 +/-j1. (0) What is the angle deficiency of the uncompensated system at the designed point provided by the location of the dominant poles? Show that the compensator provides the necessary lead angle at the designed point to satisfy the root locus angle criterion. What value of K...
 Need help with this. Please show all your steps.
K(z-15). Connected in the Assume a system, G[2]-z-ls, conventional negative unity, output feedback configuration. The only adjustable parameter in the Pl controller for this problem is the gain. (a) Find the real axis line segments in the complex z-plane that belong to the Root Locus 5. and a PI controller, C[z] associated with the closed-loop poles of this system. The Root Locus is drawn for the forward gain in the system...
Need help with this. Please show all your steps.
K(z-15). Connected in the Assume a system, G[2]-z-ls, conventional negative unity, output feedback configuration. The only adjustable parameter in the Pl controller for this problem is the gain. (a) Find the real axis line segments in the complex z-plane that belong to the Root Locus 5. and a PI controller, C[z] associated with the closed-loop poles of this system. The Root Locus is drawn for the forward gain in the system...
 % We can couple the design of gain on the root locus with a
% step-response simulation for the gain selected. We introduce
the command
% rlocus(G,K), which allows us to specify the range of gain, K,
for plotting the root
% locus. This command will help us smooth the usual root locus
plot by equivalently
% specifying more points via the argument, K. Notice that the
first root locus
% plotted without the argument K is not smooth. We...
% We can couple the design of gain on the root locus with a
% step-response simulation for the gain selected. We introduce
the command
% rlocus(G,K), which allows us to specify the range of gain, K,
for plotting the root
% locus. This command will help us smooth the usual root locus
plot by equivalently
% specifying more points via the argument, K. Notice that the
first root locus
% plotted without the argument K is not smooth. We...
 Consider the sontrol system shown in the figure below: R(S) + E(s) C(s) K (s + 4)(s + 6) g) Sketch the uncompensated system root locus showing all details. (5 Points) h) Find the dominant closed loop poles of the uncompensated system to operate with a 16.3% overshoot and peak time tp = 0.7255 (make sure to show this point on the Root Locus) (5 Points) (s+z) Now we want to design a PI compensator of the form to increase...
Consider the sontrol system shown in the figure below: R(S) + E(s) C(s) K (s + 4)(s + 6) g) Sketch the uncompensated system root locus showing all details. (5 Points) h) Find the dominant closed loop poles of the uncompensated system to operate with a 16.3% overshoot and peak time tp = 0.7255 (make sure to show this point on the Root Locus) (5 Points) (s+z) Now we want to design a PI compensator of the form to increase...
 Problem 5. (20pts) The open-loop transfer function of a unity feedback system G(8) -- +2) a) Locate open-loop zeros and open-loop poles. b) Construct the root-locus diagram as 0 <K <oo. Mark the portions of the real axis that belong to the root locus - Mark with K =0 the point where the root locus bra O the point where the root locus branches start and with K = oo the point where the branches end. - Find break-away and/or...
Problem 5. (20pts) The open-loop transfer function of a unity feedback system G(8) -- +2) a) Locate open-loop zeros and open-loop poles. b) Construct the root-locus diagram as 0 <K <oo. Mark the portions of the real axis that belong to the root locus - Mark with K =0 the point where the root locus bra O the point where the root locus branches start and with K = oo the point where the branches end. - Find break-away and/or...
 2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations of open-loop poles with X and zeros with O on an s-plane. b. Find the number of segments in the root locus diagram based on the number of poles and zeros. c. The breakaway point (the point at which the two real poles meet and diverge to become complex conjugates) occurs when K = 0.02276. Show that the closed-loop system has repeated poles for...
2. Consider the unity feedback negative system with an open-loop function G(S)-KS. a. Plot the locations of open-loop poles with X and zeros with O on an s-plane. b. Find the number of segments in the root locus diagram based on the number of poles and zeros. c. The breakaway point (the point at which the two real poles meet and diverge to become complex conjugates) occurs when K = 0.02276. Show that the closed-loop system has repeated poles for...
Most questions answered within 3 hours.
-
X Company is trying to decide whether to continue using old
equipment to make Product A...
asked 22 minutes ago -
Minitab Problem: Take the Lake Hume June rainfall data and find
use the processes outlined in...
asked 21 minutes ago -
IN PYTHON ONLY !! Program 2: Re-work
program #5 (WeeklyHours) from the previous assignment such that...
asked 59 minutes ago -
The average length of time between arrivals at a turnpike
toll-booth is 26 seconds. What is...
asked 2 hours ago -
(a) A piston at 6.1 atm contains a gas that occupies a volume of
3.5 L....
asked 3 hours ago -
Please answer true or false. Words
cannot be changed or added in to make it true...
asked 3 hours ago -
An empty test tube weighs 15.923 grams. Then,
MgCl2•6H2O is added into the test tube. After...
asked 3 hours ago -
Assume memory access is 10 units of time and disk access is
10000 units of time....
asked 4 hours ago -
1. Are all good samples random?
2. Magazines often report surveys giving statistics such as “63%...
asked 4 hours ago -
Under all the various types of market structures, firms
must eventually earn some economic profits for...
asked 4 hours ago -
Consider the following fitness regime for a single locus trait
with two co-dominant alleles: w11 =...
asked 4 hours ago -
A large cable company reports the following.
80% of its customers subscribe to its cable TV...
asked 4 hours ago