
Homework Answers

Add Answer to:
3- Four reference frames are shown in the robot workspace: the fixed frame {a}, the end...
Assume the coordinate frame assignments shown in the figure for the Rhino robot used in the...
 Assume the coordinate frame assignments shown in the figure for the Rhino robot used in the lab and the transformation matrix from the base frame to the end effector frame Ts is as given below Suppose we want to use the Rhino for a painting application where the end-effector should point at 4j degrees from the horizontal. In this case, we would need to align the end-effector frame Z axis (Z4) at 135 degrees to Z axis Given the desired...
Assume the coordinate frame assignments shown in the figure for the Rhino robot used in the lab and the transformation matrix from the base frame to the end effector frame Ts is as given below Suppose we want to use the Rhino for a painting application where the end-effector should point at 4j degrees from the horizontal. In this case, we would need to align the end-effector frame Z axis (Z4) at 135 degrees to Z axis Given the desired...
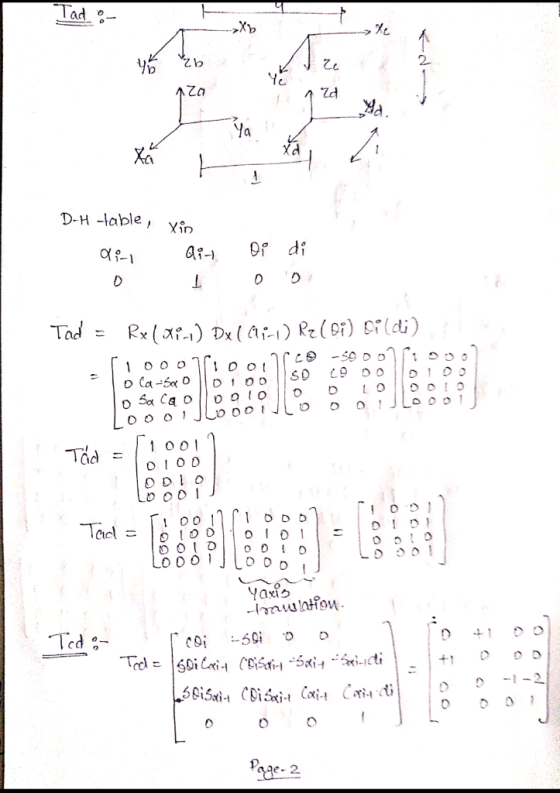
Problem 2 (50 points). Consider the diagram shown below. A robot base is set up 1m...
 Problem 2 (50 points). Consider the diagram shown below. A robot base is set up 1m from a table. A frame {Fo} is attached to the base of the robot such that the yo passes through the two legs of the table. The tabletop is 1m high and 1m square. A frame {Fi} is fixed to the edge of the table. A cube measuring 20 cm on each side is placed at the center of the table and a frame...
Problem 2 (50 points). Consider the diagram shown below. A robot base is set up 1m from a table. A frame {Fo} is attached to the base of the robot such that the yo passes through the two legs of the table. The tabletop is 1m high and 1m square. A frame {Fi} is fixed to the edge of the table. A cube measuring 20 cm on each side is placed at the center of the table and a frame...
Question 3 a) For the 3-DoF robot in Figure 3, draw the frames if the D-H...
 Question 3 a) For the 3-DoF robot in Figure 3, draw the frames if the D-H convention is used b) Using the D-H frames, express rotation matrix R as a function of 8,8... c) Solve the inverse kinematics problem, that is, 0.0... given a desired orientation defined by the rotation matrix: - Jq4. where d) Express the Jacobian matrix for the relationship velocity of frame 3 expressed within frame o. is the absolute angular Figure 3: 3-Dof robot with the...
Question 3 a) For the 3-DoF robot in Figure 3, draw the frames if the D-H convention is used b) Using the D-H frames, express rotation matrix R as a function of 8,8... c) Solve the inverse kinematics problem, that is, 0.0... given a desired orientation defined by the rotation matrix: - Jq4. where d) Express the Jacobian matrix for the relationship velocity of frame 3 expressed within frame o. is the absolute angular Figure 3: 3-Dof robot with the...
(3 points) inverted king post 01 The truss shown is called a king-post truss. It is...
 (3 points) inverted
king post 01
The truss shown is called a king-post truss. It is inverted,
such that the structure lies below the plane of the supports. Find
the reactions at the supports and the forces carried in each member
when a force of FF = 14 kN is applied and the dimensions
of the truss are given below.
a = 4.5 m
θ = 58 degrees
ϕ = 56 degrees
Designate members in compression with negative values, and...
(3 points) inverted
king post 01
The truss shown is called a king-post truss. It is inverted,
such that the structure lies below the plane of the supports. Find
the reactions at the supports and the forces carried in each member
when a force of FF = 14 kN is applied and the dimensions
of the truss are given below.
a = 4.5 m
θ = 58 degrees
ϕ = 56 degrees
Designate members in compression with negative values, and...
Consider the following page reference using four physical frames that are initially empty. (a) (5 points)...
Consider the following page reference using four physical frames that are initially empty. (a) (5 points) Find the page faults using LRU algorithm, where the page reference sequence: 5,2,5,1,4,5,2,0,4,2,3,1,2,1,0,0,2,4,5,1? (b) (5 points) Find the page faults using FIFO algorithm, where the page reference sequence: 5,2,1,5,1,0,3,1,2,1,4,0,5,4, 2,3,3, 4,2,1? (c) (5 points) Find the page faults using LRU algorithm, where the page reference sequence: 5, 0, 4, 4, 0, 3, 0, 4, 1, 0, 2, 0, 5, 3, 0, 1?
2- A camera attached to a robot arm shown below. The transformation X E SE(3) is...
 2- A camera attached to a robot arm shown below. The transformation X E SE(3) is constant. The robot arm moves from posture one to posture two. The transformations A E SE(3 and BESE(3) are measured and can be assumed to be known. Supposed that transformations X and A are given as follows, determine transformation B. (8 points) (Problem 3.25 of the textbook) 1 pose 1 camera X = [ 1 0 1 0 | 0 0 1 0 0...
2- A camera attached to a robot arm shown below. The transformation X E SE(3) is constant. The robot arm moves from posture one to posture two. The transformations A E SE(3 and BESE(3) are measured and can be assumed to be known. Supposed that transformations X and A are given as follows, determine transformation B. (8 points) (Problem 3.25 of the textbook) 1 pose 1 camera X = [ 1 0 1 0 | 0 0 1 0 0...
Question 5 [12 10 22 marks] (a) In a given inertial reference frame, S', consider a...
 Question 5 [12 10 22 marks] (a) In a given inertial reference frame, S', consider a region of space where there is a uniform and constant electric field, E', and zero magnetic field, i.e. B' = 0. The frame S' moves with respect to an observer, in another frame S, with velocity v. Write an expression for the electric field, E, observed in S? Clearly explain any notation (i) and new quantities introduced Write an expression for the magnetic field,...
Question 5 [12 10 22 marks] (a) In a given inertial reference frame, S', consider a region of space where there is a uniform and constant electric field, E', and zero magnetic field, i.e. B' = 0. The frame S' moves with respect to an observer, in another frame S, with velocity v. Write an expression for the electric field, E, observed in S? Clearly explain any notation (i) and new quantities introduced Write an expression for the magnetic field,...
LC-3 Programming Help!! The Stack Protocol The following outline is the protocol for passing arguments to...
LC-3 Programming Help!! The Stack Protocol The following outline is the protocol for passing arguments to a function and returning values. Everything is stored on the runtime stack so that space is used only when the function is executing. As a result the actual address of arguments and locals may change from call to call. However, the layout of the stack frame (activation record) is constant. Thus, the offests from the frame pointer (FP) to the parameters/locals are constant. All...
The following are screen grabs of the provided files Thanks so much for your help, and have a n...
 The following are screen grabs of the provided files
Thanks so much for your help, and have a nice day!
My Java Programming Teacher Gave me this for practice before the exam, butI can't get it to work, and I need a working version to discuss with my teacher ASAP, and I would like to sleep at some point before the exam. Please Help TEST QUESTION 5: Tamagotchi For this question, you will write a number of classes that you...
The following are screen grabs of the provided files
Thanks so much for your help, and have a nice day!
My Java Programming Teacher Gave me this for practice before the exam, butI can't get it to work, and I need a working version to discuss with my teacher ASAP, and I would like to sleep at some point before the exam. Please Help TEST QUESTION 5: Tamagotchi For this question, you will write a number of classes that you...
 Assume the coordinate frame assignments shown in the figure for the Rhino robot used in the lab and the transformation matrix from the base frame to the end effector frame Ts is as given below Suppose we want to use the Rhino for a painting application where the end-effector should point at 4j degrees from the horizontal. In this case, we would need to align the end-effector frame Z axis (Z4) at 135 degrees to Z axis Given the desired...
Assume the coordinate frame assignments shown in the figure for the Rhino robot used in the lab and the transformation matrix from the base frame to the end effector frame Ts is as given below Suppose we want to use the Rhino for a painting application where the end-effector should point at 4j degrees from the horizontal. In this case, we would need to align the end-effector frame Z axis (Z4) at 135 degrees to Z axis Given the desired...
 Problem 2 (50 points). Consider the diagram shown below. A robot base is set up 1m from a table. A frame {Fo} is attached to the base of the robot such that the yo passes through the two legs of the table. The tabletop is 1m high and 1m square. A frame {Fi} is fixed to the edge of the table. A cube measuring 20 cm on each side is placed at the center of the table and a frame...
Problem 2 (50 points). Consider the diagram shown below. A robot base is set up 1m from a table. A frame {Fo} is attached to the base of the robot such that the yo passes through the two legs of the table. The tabletop is 1m high and 1m square. A frame {Fi} is fixed to the edge of the table. A cube measuring 20 cm on each side is placed at the center of the table and a frame...
 Question 3 a) For the 3-DoF robot in Figure 3, draw the frames if the D-H convention is used b) Using the D-H frames, express rotation matrix R as a function of 8,8... c) Solve the inverse kinematics problem, that is, 0.0... given a desired orientation defined by the rotation matrix: - Jq4. where d) Express the Jacobian matrix for the relationship velocity of frame 3 expressed within frame o. is the absolute angular Figure 3: 3-Dof robot with the...
Question 3 a) For the 3-DoF robot in Figure 3, draw the frames if the D-H convention is used b) Using the D-H frames, express rotation matrix R as a function of 8,8... c) Solve the inverse kinematics problem, that is, 0.0... given a desired orientation defined by the rotation matrix: - Jq4. where d) Express the Jacobian matrix for the relationship velocity of frame 3 expressed within frame o. is the absolute angular Figure 3: 3-Dof robot with the...
 (3 points) inverted
king post 01
The truss shown is called a king-post truss. It is inverted,
such that the structure lies below the plane of the supports. Find
the reactions at the supports and the forces carried in each member
when a force of FF = 14 kN is applied and the dimensions
of the truss are given below.
a = 4.5 m
θ = 58 degrees
ϕ = 56 degrees
Designate members in compression with negative values, and...
(3 points) inverted
king post 01
The truss shown is called a king-post truss. It is inverted,
such that the structure lies below the plane of the supports. Find
the reactions at the supports and the forces carried in each member
when a force of FF = 14 kN is applied and the dimensions
of the truss are given below.
a = 4.5 m
θ = 58 degrees
ϕ = 56 degrees
Designate members in compression with negative values, and...
 2- A camera attached to a robot arm shown below. The transformation X E SE(3) is constant. The robot arm moves from posture one to posture two. The transformations A E SE(3 and BESE(3) are measured and can be assumed to be known. Supposed that transformations X and A are given as follows, determine transformation B. (8 points) (Problem 3.25 of the textbook) 1 pose 1 camera X = [ 1 0 1 0 | 0 0 1 0 0...
2- A camera attached to a robot arm shown below. The transformation X E SE(3) is constant. The robot arm moves from posture one to posture two. The transformations A E SE(3 and BESE(3) are measured and can be assumed to be known. Supposed that transformations X and A are given as follows, determine transformation B. (8 points) (Problem 3.25 of the textbook) 1 pose 1 camera X = [ 1 0 1 0 | 0 0 1 0 0...
 Question 5 [12 10 22 marks] (a) In a given inertial reference frame, S', consider a region of space where there is a uniform and constant electric field, E', and zero magnetic field, i.e. B' = 0. The frame S' moves with respect to an observer, in another frame S, with velocity v. Write an expression for the electric field, E, observed in S? Clearly explain any notation (i) and new quantities introduced Write an expression for the magnetic field,...
Question 5 [12 10 22 marks] (a) In a given inertial reference frame, S', consider a region of space where there is a uniform and constant electric field, E', and zero magnetic field, i.e. B' = 0. The frame S' moves with respect to an observer, in another frame S, with velocity v. Write an expression for the electric field, E, observed in S? Clearly explain any notation (i) and new quantities introduced Write an expression for the magnetic field,...
 The following are screen grabs of the provided files
Thanks so much for your help, and have a nice day!
My Java Programming Teacher Gave me this for practice before the exam, butI can't get it to work, and I need a working version to discuss with my teacher ASAP, and I would like to sleep at some point before the exam. Please Help TEST QUESTION 5: Tamagotchi For this question, you will write a number of classes that you...
The following are screen grabs of the provided files
Thanks so much for your help, and have a nice day!
My Java Programming Teacher Gave me this for practice before the exam, butI can't get it to work, and I need a working version to discuss with my teacher ASAP, and I would like to sleep at some point before the exam. Please Help TEST QUESTION 5: Tamagotchi For this question, you will write a number of classes that you...
Most questions answered within 3 hours.
-
A 0.0510 M solution of an organic acid has an
[H+] of 7.50×10-4M .
What is...
asked 1 minute ago -
The completed Lewis structure of CO2 contains a total
of 0,1,2,3,4,5,6,7,8 covalent bonds
and 0,1,2,3,4,5,6,7,8 lone pairs.
NOTE:...
asked 4 minutes ago -
what is the profit-maximizing output condition that a
monopolistically competitive firm must satisfy? a) price charged...
asked 5 minutes ago -
Consider the set of ordered pairs shown below. Assuming that the
regression equation is y=3.513+0.429x and...
asked 26 minutes ago -
1. (A) Write two
structural (constitutional)
isomers of C4H8F2?
Please show all of
the
asked 29 minutes ago -
Objective: Practice converting a Boolean logic
expression into it’s truth table and to show the implementation...
asked 26 minutes ago -
1) Name the three holes located in the greater wing of the
sphenoid bone in order...
asked 29 minutes ago -
For the following reaction set-up, which type of hydrocarbon
product would form? 1,4-hexadiene + two Cl2...
asked 32 minutes ago -
Consider the following method that is intended to determine if
the double values d1 and d2...
asked 44 minutes ago -
could someone please post clear drawings of the three structures
in the equilibrium mixture of D-glucose...
asked 51 minutes ago -
Using the Properties of Order show that 5n5 +
4n4 + 6n3 + 2n2+ n +...
asked 54 minutes ago -
What is experiential learning and how is it helpful for teaching
leadership, and interpreting group dynamics?...
asked 54 minutes ago