

Homework Answers
![and mode: rk 00M7 [%] 7 a10800 X, - 7200 -4800 X2 -7200 let X, al -7200 -4800 Xy = 0 X, :-1.5 Vo C-is] -1.5 Viivi Vo] Modal v](http://img.homeworklib.com/questions/4b52e670-f6a6-11ea-a75f-bfe92cd9e578.png?x-oss-process=image/resize,w_560)

![B, y,m dro) 19 40 tm Vs 18 120 40 [ 113 [ 11 Ire 2 40 -] [6] ( ] [3] 36 0 40 3, 2 9 system responre: from U: Vni B, sinu,t +](http://img.homeworklib.com/questions/4fdc62d0-f6a6-11ea-b889-af6084f2eb43.png?x-oss-process=image/resize,w_560)
Add Answer to:
The vector-matrix form of the system model is: (18 0 18000 72001 x f(t) or Mx...
The vector-matrix form of the system model is: (18 0 18000 72001 x f(t) or Mx...
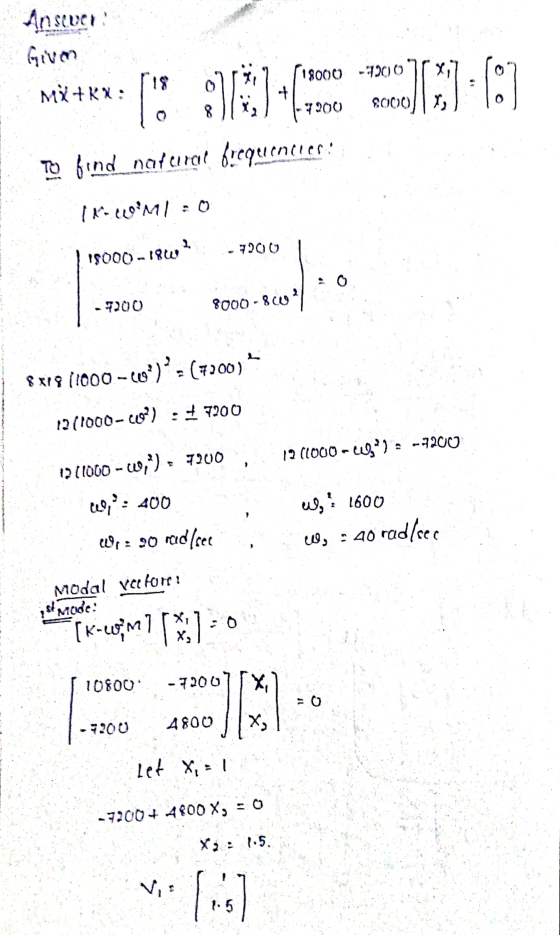
 The vector-matrix form of the system model is: (18 0 18000 72001 x f(t) or Mx + Kx = f(t) 08.3. -7200 8000 | X, 3. (1) X= M = (18 0 08 K 18000 -7200 7200 8000 and f(t) = (1) 12(0)] [x₂(t) The system's eigenvalues, natural frequencies, and eigenvectors are: 1 2 = 400, 0, = 20 s', and v, 1.5 1.) = 1600, 0), = 40 s', and v, = -1.5 1 1 The inverse of modal...
The vector-matrix form of the system model is: (18 0 18000 72001 x f(t) or Mx + Kx = f(t) 08.3. -7200 8000 | X, 3. (1) X= M = (18 0 08 K 18000 -7200 7200 8000 and f(t) = (1) 12(0)] [x₂(t) The system's eigenvalues, natural frequencies, and eigenvectors are: 1 2 = 400, 0, = 20 s', and v, 1.5 1.) = 1600, 0), = 40 s', and v, = -1.5 1 1 The inverse of modal...
Consider an undamped system where the vector-matrix form of the system model is: [18 072 Mä...
 Consider an undamped system where the vector-matrix form of the system model is: [18 072 Mä +Kx = 08 |, [18000 - 7200 x -7200 8000 1-10 The system is initially at rest in equilibrium when it is put into motion with an initial velocity (0) = 120 while x,0) = x, 0) = 0 and «,(0) = 0. Use modal decomposition to find the system's free response.
Consider an undamped system where the vector-matrix form of the system model is: [18 072 Mä +Kx = 08 |, [18000 - 7200 x -7200 8000 1-10 The system is initially at rest in equilibrium when it is put into motion with an initial velocity (0) = 120 while x,0) = x, 0) = 0 and «,(0) = 0. Use modal decomposition to find the system's free response.
Consider an undamped system where the vector-matrix form of the system model is: [F(t) [18 07ž...
 Consider an undamped system where the vector-matrix form of the system model is: [F(t) [18 07ž Mx + Kx = 083, + [18000 -72007x -7200 8000X, E]-[] The input to the system is F(t) = 6300 sin (30t). Use modal decomposition to find the system's frequency response. Note that the frequency response is the particular solution, and also called the steady-state response.
Consider an undamped system where the vector-matrix form of the system model is: [F(t) [18 07ž Mx + Kx = 083, + [18000 -72007x -7200 8000X, E]-[] The input to the system is F(t) = 6300 sin (30t). Use modal decomposition to find the system's frequency response. Note that the frequency response is the particular solution, and also called the steady-state response.
Consider an undamped system where the vector-matrix form of the system model is: F(t) [8 olx...
 Consider an undamped system where the vector-matrix form of the system model is: F(t) [8 olx Mx + Kx = 0 18X, + 2000 -1800 x -1800 4500 I:1-[0] The system is initially at rest with x(0) = 0 and x,0)=0 when input F(t) = 84 sin15t is applied to the system. Use the modal decomposition method described in chapter 5 to find the system response. Some intermediate results (find these as part of your solution) are: The system's two...
Consider an undamped system where the vector-matrix form of the system model is: F(t) [8 olx Mx + Kx = 0 18X, + 2000 -1800 x -1800 4500 I:1-[0] The system is initially at rest with x(0) = 0 and x,0)=0 when input F(t) = 84 sin15t is applied to the system. Use the modal decomposition method described in chapter 5 to find the system response. Some intermediate results (find these as part of your solution) are: The system's two...
Consider an undamped system where the vector-matrix form of the system model is: [F(t) [8 orë...
 Consider an undamped system where the vector-matrix form of the system model is: [F(t) [8 orë Mx + x = LO 183, 2000 -1800 x (-1800 45001 The system is initially at rest with X (0) = 0 and 2,0)=0 when input F(t) = 84 sin 15t is applied to the system. Use the modal decomposition method described in chapter 5 to find the system response. Some intermediate results (find these as part of your solution) are: The system's two...
Consider an undamped system where the vector-matrix form of the system model is: [F(t) [8 orë Mx + x = LO 183, 2000 -1800 x (-1800 45001 The system is initially at rest with X (0) = 0 and 2,0)=0 when input F(t) = 84 sin 15t is applied to the system. Use the modal decomposition method described in chapter 5 to find the system response. Some intermediate results (find these as part of your solution) are: The system's two...
Consider an undamped system where the vector-matrix form of the system model is: Mx+Kx = ft)...
 Consider an undamped system where the vector-matrix form of the system model is: Mx+Kx = ft) 90 F(1) M= [ ] K = 5220 -1440 L-1440 2880 and f(t) = -[10] Find the following without using linear algebra software or calculator functions: a) The system's natural frequencies and mode shapes. b) The mass-normalized matrix V that makes VTMV=I.
Consider an undamped system where the vector-matrix form of the system model is: Mx+Kx = ft) 90 F(1) M= [ ] K = 5220 -1440 L-1440 2880 and f(t) = -[10] Find the following without using linear algebra software or calculator functions: a) The system's natural frequencies and mode shapes. b) The mass-normalized matrix V that makes VTMV=I.
2 Homogeneous coordinates Recall that an affine function is of the form f^x) Mx + t for a matrix M and vector t. Homoge...
 2 Homogeneous coordinates Recall that an affine function is of the form f^x) Mx + t for a matrix M and vector t. Homogeneous coordinates are frequently used to represent affine functions in robotics and 3D graphics. We define the function H by and if f-x) Mxtt where then C0 a. Some vectors are valid homogeneous representations of vectors, and some are not. Explain how to tell if some vector y-0 is the homogeneous representation of some other vector -y...
2 Homogeneous coordinates Recall that an affine function is of the form f^x) Mx + t for a matrix M and vector t. Homogeneous coordinates are frequently used to represent affine functions in robotics and 3D graphics. We define the function H by and if f-x) Mxtt where then C0 a. Some vectors are valid homogeneous representations of vectors, and some are not. Explain how to tell if some vector y-0 is the homogeneous representation of some other vector -y...
Suppose X is a random vector, where X = (X(1), . . . , x(d))T , d with mean 0 and covariance matr...
 Suppose X is a random vector, where X = (X(1), . . . , x(d))T , d with mean 0 and covariance matrix vv1 , for some vector v ER 1point possible (graded) Let v = . (i.e., v is the normalized version of v). What is the variance of v X? (If applicable, enter trans(v) for the transpose v of v, and normv) for the norm |vll of a vector v.) Var (V STANDARD NOTATION SubmitYou have used 0...
Suppose X is a random vector, where X = (X(1), . . . , x(d))T , d with mean 0 and covariance matrix vv1 , for some vector v ER 1point possible (graded) Let v = . (i.e., v is the normalized version of v). What is the variance of v X? (If applicable, enter trans(v) for the transpose v of v, and normv) for the norm |vll of a vector v.) Var (V STANDARD NOTATION SubmitYou have used 0...
The motor weighs 20 lb and is supported on four springs where k = 25 lb/in...
 The motor weighs 20 lb and is supported on four springs where k = 25 lb/in for each spring. 3-lb weights are on the ends of two cantilever beams attached to the motor. EI = 2000 lb-in” for the cantilever beams and the length of each beam is l = 10 in. The vector-matrix form of the system model is: 4356 0 0 Ti [112 -6 -6 Yuse 0 , + -6 6 0 %386L, -60 Mä + Kx =...
The motor weighs 20 lb and is supported on four springs where k = 25 lb/in for each spring. 3-lb weights are on the ends of two cantilever beams attached to the motor. EI = 2000 lb-in” for the cantilever beams and the length of each beam is l = 10 in. The vector-matrix form of the system model is: 4356 0 0 Ti [112 -6 -6 Yuse 0 , + -6 6 0 %386L, -60 Mä + Kx =...
For the following system: -13 1 0 x(t)30 01x(t)u(t) y(t)=[1 이 x(t) 0 a. Determine if the system ...
 For the following system: -13 1 0 x(t)30 01x(t)u(t) y(t)=[1 이 x(t) 0 a. Determine if the system is completely controllable. b. If the system is completely controllable, design a state feedback regulator of the form u(t)-Kx(t) to meet the following performance criteria: %10 1.5% · T, = 0.667 sec
For the following system: -13 1 0 x(t)30 01x(t)u(t) y(t)=[1 이 x(t) 0 a. Determine if the system is completely controllable. b. If the system is completely controllable, design a...
For the following system: -13 1 0 x(t)30 01x(t)u(t) y(t)=[1 이 x(t) 0 a. Determine if the system is completely controllable. b. If the system is completely controllable, design a state feedback regulator of the form u(t)-Kx(t) to meet the following performance criteria: %10 1.5% · T, = 0.667 sec
For the following system: -13 1 0 x(t)30 01x(t)u(t) y(t)=[1 이 x(t) 0 a. Determine if the system is completely controllable. b. If the system is completely controllable, design a...
 The vector-matrix form of the system model is: (18 0 18000 72001 x f(t) or Mx + Kx = f(t) 08.3. -7200 8000 | X, 3. (1) X= M = (18 0 08 K 18000 -7200 7200 8000 and f(t) = (1) 12(0)] [x₂(t) The system's eigenvalues, natural frequencies, and eigenvectors are: 1 2 = 400, 0, = 20 s', and v, 1.5 1.) = 1600, 0), = 40 s', and v, = -1.5 1 1 The inverse of modal...
The vector-matrix form of the system model is: (18 0 18000 72001 x f(t) or Mx + Kx = f(t) 08.3. -7200 8000 | X, 3. (1) X= M = (18 0 08 K 18000 -7200 7200 8000 and f(t) = (1) 12(0)] [x₂(t) The system's eigenvalues, natural frequencies, and eigenvectors are: 1 2 = 400, 0, = 20 s', and v, 1.5 1.) = 1600, 0), = 40 s', and v, = -1.5 1 1 The inverse of modal...
 Consider an undamped system where the vector-matrix form of the system model is: [18 072 Mä +Kx = 08 |, [18000 - 7200 x -7200 8000 1-10 The system is initially at rest in equilibrium when it is put into motion with an initial velocity (0) = 120 while x,0) = x, 0) = 0 and «,(0) = 0. Use modal decomposition to find the system's free response.
Consider an undamped system where the vector-matrix form of the system model is: [18 072 Mä +Kx = 08 |, [18000 - 7200 x -7200 8000 1-10 The system is initially at rest in equilibrium when it is put into motion with an initial velocity (0) = 120 while x,0) = x, 0) = 0 and «,(0) = 0. Use modal decomposition to find the system's free response.
 Consider an undamped system where the vector-matrix form of the system model is: [F(t) [18 07ž Mx + Kx = 083, + [18000 -72007x -7200 8000X, E]-[] The input to the system is F(t) = 6300 sin (30t). Use modal decomposition to find the system's frequency response. Note that the frequency response is the particular solution, and also called the steady-state response.
Consider an undamped system where the vector-matrix form of the system model is: [F(t) [18 07ž Mx + Kx = 083, + [18000 -72007x -7200 8000X, E]-[] The input to the system is F(t) = 6300 sin (30t). Use modal decomposition to find the system's frequency response. Note that the frequency response is the particular solution, and also called the steady-state response.
 Consider an undamped system where the vector-matrix form of the system model is: F(t) [8 olx Mx + Kx = 0 18X, + 2000 -1800 x -1800 4500 I:1-[0] The system is initially at rest with x(0) = 0 and x,0)=0 when input F(t) = 84 sin15t is applied to the system. Use the modal decomposition method described in chapter 5 to find the system response. Some intermediate results (find these as part of your solution) are: The system's two...
Consider an undamped system where the vector-matrix form of the system model is: F(t) [8 olx Mx + Kx = 0 18X, + 2000 -1800 x -1800 4500 I:1-[0] The system is initially at rest with x(0) = 0 and x,0)=0 when input F(t) = 84 sin15t is applied to the system. Use the modal decomposition method described in chapter 5 to find the system response. Some intermediate results (find these as part of your solution) are: The system's two...
 Consider an undamped system where the vector-matrix form of the system model is: [F(t) [8 orë Mx + x = LO 183, 2000 -1800 x (-1800 45001 The system is initially at rest with X (0) = 0 and 2,0)=0 when input F(t) = 84 sin 15t is applied to the system. Use the modal decomposition method described in chapter 5 to find the system response. Some intermediate results (find these as part of your solution) are: The system's two...
Consider an undamped system where the vector-matrix form of the system model is: [F(t) [8 orë Mx + x = LO 183, 2000 -1800 x (-1800 45001 The system is initially at rest with X (0) = 0 and 2,0)=0 when input F(t) = 84 sin 15t is applied to the system. Use the modal decomposition method described in chapter 5 to find the system response. Some intermediate results (find these as part of your solution) are: The system's two...
 Consider an undamped system where the vector-matrix form of the system model is: Mx+Kx = ft) 90 F(1) M= [ ] K = 5220 -1440 L-1440 2880 and f(t) = -[10] Find the following without using linear algebra software or calculator functions: a) The system's natural frequencies and mode shapes. b) The mass-normalized matrix V that makes VTMV=I.
Consider an undamped system where the vector-matrix form of the system model is: Mx+Kx = ft) 90 F(1) M= [ ] K = 5220 -1440 L-1440 2880 and f(t) = -[10] Find the following without using linear algebra software or calculator functions: a) The system's natural frequencies and mode shapes. b) The mass-normalized matrix V that makes VTMV=I.
 2 Homogeneous coordinates Recall that an affine function is of the form f^x) Mx + t for a matrix M and vector t. Homogeneous coordinates are frequently used to represent affine functions in robotics and 3D graphics. We define the function H by and if f-x) Mxtt where then C0 a. Some vectors are valid homogeneous representations of vectors, and some are not. Explain how to tell if some vector y-0 is the homogeneous representation of some other vector -y...
2 Homogeneous coordinates Recall that an affine function is of the form f^x) Mx + t for a matrix M and vector t. Homogeneous coordinates are frequently used to represent affine functions in robotics and 3D graphics. We define the function H by and if f-x) Mxtt where then C0 a. Some vectors are valid homogeneous representations of vectors, and some are not. Explain how to tell if some vector y-0 is the homogeneous representation of some other vector -y...
 Suppose X is a random vector, where X = (X(1), . . . , x(d))T , d with mean 0 and covariance matrix vv1 , for some vector v ER 1point possible (graded) Let v = . (i.e., v is the normalized version of v). What is the variance of v X? (If applicable, enter trans(v) for the transpose v of v, and normv) for the norm |vll of a vector v.) Var (V STANDARD NOTATION SubmitYou have used 0...
Suppose X is a random vector, where X = (X(1), . . . , x(d))T , d with mean 0 and covariance matrix vv1 , for some vector v ER 1point possible (graded) Let v = . (i.e., v is the normalized version of v). What is the variance of v X? (If applicable, enter trans(v) for the transpose v of v, and normv) for the norm |vll of a vector v.) Var (V STANDARD NOTATION SubmitYou have used 0...
 The motor weighs 20 lb and is supported on four springs where k = 25 lb/in for each spring. 3-lb weights are on the ends of two cantilever beams attached to the motor. EI = 2000 lb-in” for the cantilever beams and the length of each beam is l = 10 in. The vector-matrix form of the system model is: 4356 0 0 Ti [112 -6 -6 Yuse 0 , + -6 6 0 %386L, -60 Mä + Kx =...
The motor weighs 20 lb and is supported on four springs where k = 25 lb/in for each spring. 3-lb weights are on the ends of two cantilever beams attached to the motor. EI = 2000 lb-in” for the cantilever beams and the length of each beam is l = 10 in. The vector-matrix form of the system model is: 4356 0 0 Ti [112 -6 -6 Yuse 0 , + -6 6 0 %386L, -60 Mä + Kx =...
 For the following system: -13 1 0 x(t)30 01x(t)u(t) y(t)=[1 이 x(t) 0 a. Determine if the system is completely controllable. b. If the system is completely controllable, design a state feedback regulator of the form u(t)-Kx(t) to meet the following performance criteria: %10 1.5% · T, = 0.667 sec
For the following system: -13 1 0 x(t)30 01x(t)u(t) y(t)=[1 이 x(t) 0 a. Determine if the system is completely controllable. b. If the system is completely controllable, design a...
For the following system: -13 1 0 x(t)30 01x(t)u(t) y(t)=[1 이 x(t) 0 a. Determine if the system is completely controllable. b. If the system is completely controllable, design a state feedback regulator of the form u(t)-Kx(t) to meet the following performance criteria: %10 1.5% · T, = 0.667 sec
For the following system: -13 1 0 x(t)30 01x(t)u(t) y(t)=[1 이 x(t) 0 a. Determine if the system is completely controllable. b. If the system is completely controllable, design a...
Most questions answered within 3 hours.
-
Accent Software faces the following conditions. All of these
support Accent’s use of a market-penetration pricing...
asked 8 minutes ago -
A mathematically inclined friend emails you the following
instructions: "Meet me in the cafeteria the first...
asked 11 minutes ago -
A monopoly sells in two countries . The demand curves in the two
countries are p1...
asked 1 hour ago -
A .15kg rubber ball is bounced off a wall. Before hitting the
wall, the ball moves...
asked 1 hour ago -
A manufacturing company preparing to build a new plant is
considering three potential locations for it....
asked 1 hour ago -
B. If compound Y has approximately the same values of solubility
in toluene as compound X,...
asked 2 hours ago -
Oscar Inc. has inventory in Japan valued at 39,051,000 Yen one
year ago. One year ago...
asked 2 hours ago -
If Canada suffered from "fundamental disequilibrium," and its
government choose not to devalue its currency, a...
asked 2 hours ago -
4. How many input & output Key Value Pairs are passed into,
and emitted out of...
asked 2 hours ago -
Why would your heart not function well if constructed of
skeletal muscle? What is the particular...
asked 2 hours ago -
Please respond to this essay question in full essay form for
Chemistry 1102 Organic and Biochemistry:...
asked 2 hours ago -
Determine the head loss and velocity of flow in a water supply main
of 15.0 cm...
asked 2 hours ago