
Homework Answers
Add Answer to:
Question 3 a) Develop the transfer function X2%)/F(s) of the mechanical system shown in Figure 3(a)....
Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure...
 Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in...
Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in...
Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a)....
 Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
a) Develop the transfer function X:(s)/F(s) of the mechanical system shown in Figure 3(a). Give and...
 a) Develop the transfer function X:(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate...
a) Develop the transfer function X:(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate...
question 1 Question 3 a) Develop the transfer function X (s)/F(s) of the mechanical system shown...
 question 1
Question 3 a) Develop the transfer function X (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as...
question 1
Question 3 a) Develop the transfer function X (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as...
Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does...
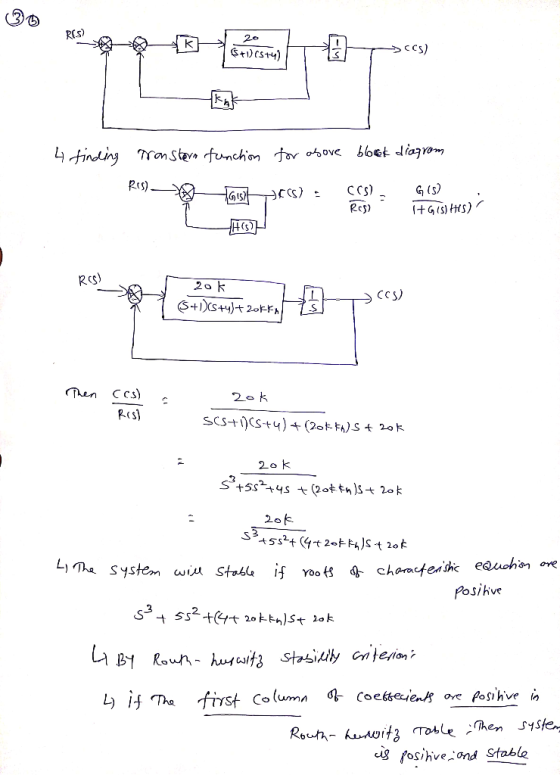
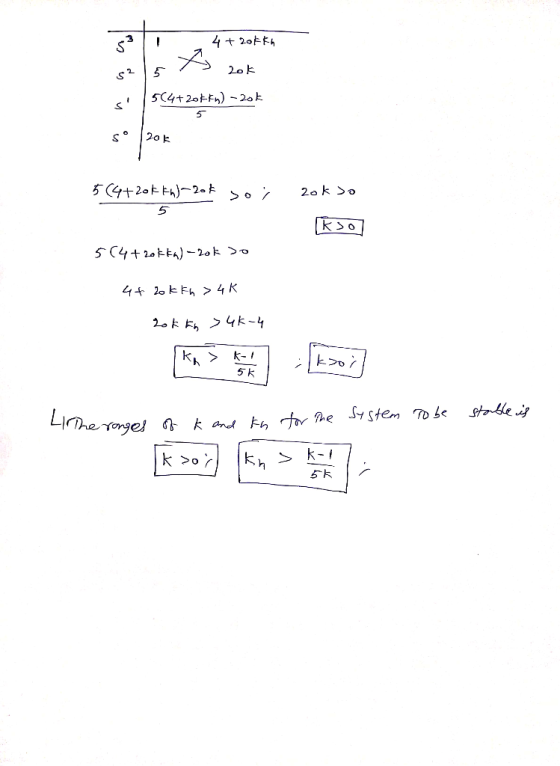
 Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate the ranges of stability for K and Kn. (Note that Kn must be positive). R(s) C(s) 20 (5 + 1) (8 + 4) $ KA
Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate the ranges of stability for K and Kn. (Note that Kn must be positive). R(s) C(s) 20 (5 + 1) (8 + 4) $ KA
Question 2 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise...
 Question 2 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2b). i Determine the value in so that the damping ratio of the system is 0.5. (1 % marks) From the result obtained in , evaluate the transient response characteristics (rise...
Question 2 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2b). i Determine the value in so that the damping ratio of the system is 0.5. (1 % marks) From the result obtained in , evaluate the transient response characteristics (rise...
Question 3 (35 marks) Consider a mechanical system shown in Figure 3. The system is at rest for t
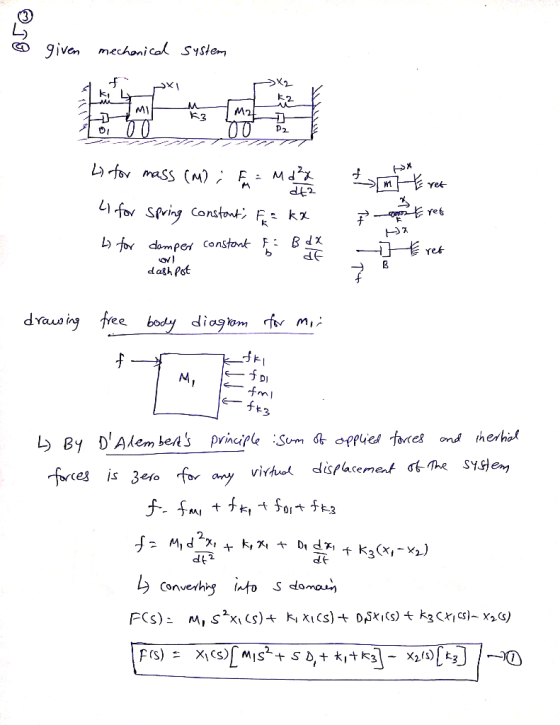
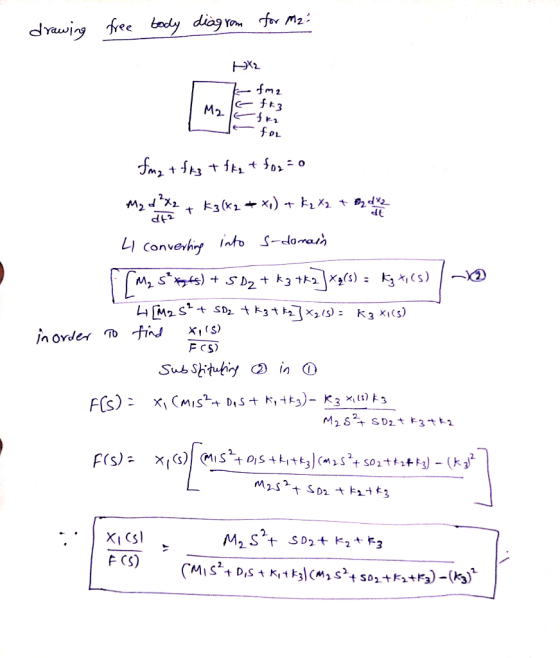
 Question 3 (35 marks) Consider a mechanical system shown in Figure 3. The system is at rest for t<0. The input force f is applied at 0. The displacement x is the output of the system and is measured from the equilibrium position. kI b2 bi it Figure 3. Schematic of a mechanical system. (a) Obtain the traf) (10 marks) X (s) F(s) (b) Use of force-voltage analogy, obtain the equations for an electrical system (5 marks) (c) Draw a...
Question 3 (35 marks) Consider a mechanical system shown in Figure 3. The system is at rest for t<0. The input force f is applied at 0. The displacement x is the output of the system and is measured from the equilibrium position. kI b2 bi it Figure 3. Schematic of a mechanical system. (a) Obtain the traf) (10 marks) X (s) F(s) (b) Use of force-voltage analogy, obtain the equations for an electrical system (5 marks) (c) Draw a...
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given...
 3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
Q2. Fig Q2 shows the block diagram of an unstable system with transfer function G(s) -...
 Q2. Fig Q2 shows the block diagram of an unstable system with transfer function G(s) - under the control of a lead compensator (a) Using the Routh's stability criterion, determine the conditions on k and a so that the closed-loop system is stable, and sketch the region on the (k, a)- plane where the conditions are satisfied. Hence, determine the minimum value of k for the lead compensator to be a feasible stabilizing controller. (10 marks) (b) Suppose α-2. Given...
Q2. Fig Q2 shows the block diagram of an unstable system with transfer function G(s) - under the control of a lead compensator (a) Using the Routh's stability criterion, determine the conditions on k and a so that the closed-loop system is stable, and sketch the region on the (k, a)- plane where the conditions are satisfied. Hence, determine the minimum value of k for the lead compensator to be a feasible stabilizing controller. (10 marks) (b) Suppose α-2. Given...
a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak...
 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2(b). i Determine the value K, so that the damping ratio of the system is 0.5. (1 % marks) ii. From the result obtained in (), evaluate the transient response characteristics (rise time,...
a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2(b). i Determine the value K, so that the damping ratio of the system is 0.5. (1 % marks) ii. From the result obtained in (), evaluate the transient response characteristics (rise time,...
 Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in...
Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in...
 Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
 a) Develop the transfer function X:(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate...
a) Develop the transfer function X:(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate...
 question 1
Question 3 a) Develop the transfer function X (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as...
question 1
Question 3 a) Develop the transfer function X (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as...
 Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate the ranges of stability for K and Kn. (Note that Kn must be positive). R(s) C(s) 20 (5 + 1) (8 + 4) $ KA
Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate the ranges of stability for K and Kn. (Note that Kn must be positive). R(s) C(s) 20 (5 + 1) (8 + 4) $ KA
 Question 2 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2b). i Determine the value in so that the damping ratio of the system is 0.5. (1 % marks) From the result obtained in , evaluate the transient response characteristics (rise...
Question 2 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2b). i Determine the value in so that the damping ratio of the system is 0.5. (1 % marks) From the result obtained in , evaluate the transient response characteristics (rise...
 Question 3 (35 marks) Consider a mechanical system shown in Figure 3. The system is at rest for t<0. The input force f is applied at 0. The displacement x is the output of the system and is measured from the equilibrium position. kI b2 bi it Figure 3. Schematic of a mechanical system. (a) Obtain the traf) (10 marks) X (s) F(s) (b) Use of force-voltage analogy, obtain the equations for an electrical system (5 marks) (c) Draw a...
Question 3 (35 marks) Consider a mechanical system shown in Figure 3. The system is at rest for t<0. The input force f is applied at 0. The displacement x is the output of the system and is measured from the equilibrium position. kI b2 bi it Figure 3. Schematic of a mechanical system. (a) Obtain the traf) (10 marks) X (s) F(s) (b) Use of force-voltage analogy, obtain the equations for an electrical system (5 marks) (c) Draw a...
 3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
 Q2. Fig Q2 shows the block diagram of an unstable system with transfer function G(s) - under the control of a lead compensator (a) Using the Routh's stability criterion, determine the conditions on k and a so that the closed-loop system is stable, and sketch the region on the (k, a)- plane where the conditions are satisfied. Hence, determine the minimum value of k for the lead compensator to be a feasible stabilizing controller. (10 marks) (b) Suppose α-2. Given...
Q2. Fig Q2 shows the block diagram of an unstable system with transfer function G(s) - under the control of a lead compensator (a) Using the Routh's stability criterion, determine the conditions on k and a so that the closed-loop system is stable, and sketch the region on the (k, a)- plane where the conditions are satisfied. Hence, determine the minimum value of k for the lead compensator to be a feasible stabilizing controller. (10 marks) (b) Suppose α-2. Given...
 a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2(b). i Determine the value K, so that the damping ratio of the system is 0.5. (1 % marks) ii. From the result obtained in (), evaluate the transient response characteristics (rise time,...
a) Consider the control system in Figure 2(a). Determine the transient response characteristics (rise time, peak time, maximum overshoot and settling time) and the steady state error for the system. (2 marks) b) To improve the relative stability, the tachometer feedback are employed as shown in Figure 2(b). i Determine the value K, so that the damping ratio of the system is 0.5. (1 % marks) ii. From the result obtained in (), evaluate the transient response characteristics (rise time,...
Most questions answered within 3 hours.
-
An MNE is this kind of industry when competition in one country
is essentially independent of...
asked 1 hour ago -
. For this set of questions, determine what
proportion of a normal distribution is located betweeneach...
asked 1 hour ago -
A college student is employed as a door-to-door newspaper
salesman. Historical data suggests that the student...
asked 2 hours ago -
MATLAB HW 11 problem using Switch Case and Input commands
Write a script file that calculates...
asked 2 hours ago -
Considering gravitational time dilation, calculate the time that
passes in Earth’s surface while 1 hour passes...
asked 3 hours ago -
Minitab Problem: Take the Lake Hume June rainfall data and find
use the processes outlined in...
asked 4 hours ago -
X Company is trying to decide whether to continue using old
equipment to make Product A...
asked 4 hours ago -
IN PYTHON ONLY !! Program 2: Re-work
program #5 (WeeklyHours) from the previous assignment such that...
asked 4 hours ago -
The average length of time between arrivals at a turnpike
toll-booth is 26 seconds. What is...
asked 6 hours ago -
(a) A piston at 6.1 atm contains a gas that occupies a volume of
3.5 L....
asked 7 hours ago -
Please answer true or false. Words
cannot be changed or added in to make it true...
asked 7 hours ago -
An empty test tube weighs 15.923 grams. Then,
MgCl2•6H2O is added into the test tube. After...
asked 7 hours ago