

Homework Answers


Add Answer to:
Question 3 (35 marks) Consider a mechanical system shown in Figure 3. The system is at rest for t
Q5 The equation of the motion of the mechanical system shown in the following figure is...
 Q5 The equation of the motion of the mechanical system shown in the following figure is governed by the following differential equation d2 x dx m7+9+= -f(t) - 3kx dt2 dt where m, C and k are mass, damping coefficient and spring constant, respectively. Consider the system with m = 10 kg, c = 80 Ns/m, k = 50 N/m, and the system is at rest at time t = 0 s. f(t) is the external force acting on the...
Q5 The equation of the motion of the mechanical system shown in the following figure is governed by the following differential equation d2 x dx m7+9+= -f(t) - 3kx dt2 dt where m, C and k are mass, damping coefficient and spring constant, respectively. Consider the system with m = 10 kg, c = 80 Ns/m, k = 50 N/m, and the system is at rest at time t = 0 s. f(t) is the external force acting on the...
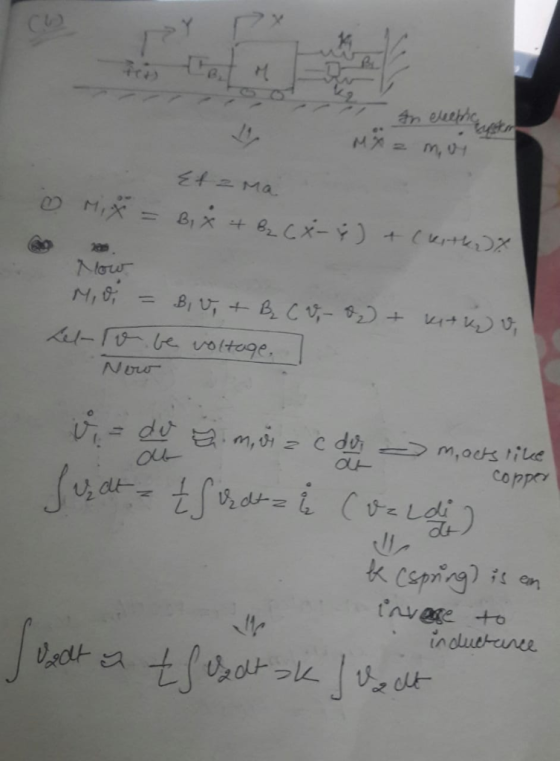
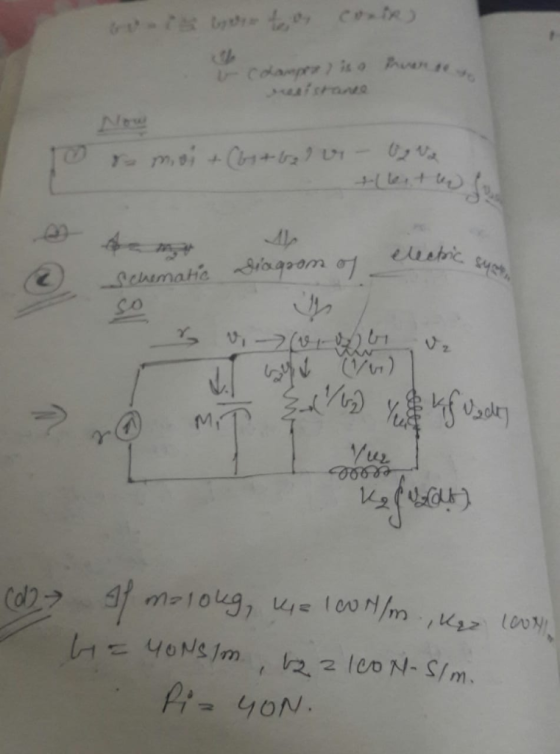
Mi k2 b yi m2 Figure 5-45 Mechanical system. Assuming that mi 10 kg, m2 5 kg, b 10 N-s/m, k 40 N/...
 mi k2 b yi m2 Figure 5-45 Mechanical system. Assuming that mi 10 kg, m2 5 kg, b 10 N-s/m, k 40 N/m, and k 20 N/m and that input force u is a constant force of 5 N, obtain the response of the sys- tem. Plot the response curves n(t) versus r and y2(t) versus t with MATLAB Problem B-5-23 Consider the system shown in Figure 5-45. The system is at rest for t < 0. The dis placements...
mi k2 b yi m2 Figure 5-45 Mechanical system. Assuming that mi 10 kg, m2 5 kg, b 10 N-s/m, k 40 N/m, and k 20 N/m and that input force u is a constant force of 5 N, obtain the response of the sys- tem. Plot the response curves n(t) versus r and y2(t) versus t with MATLAB Problem B-5-23 Consider the system shown in Figure 5-45. The system is at rest for t < 0. The dis placements...
mwu Q3. a) Consider the mechanical system shown, obtain the transfer function x(s)/P(s), assuming all initial...
 mwu Q3. a) Consider the mechanical system shown, obtain the transfer function x(s)/P(s), assuming all initial conditions are zeros. (10 marks) Ž p3k, у b) For the question in part (a), assuming that m = 20 kg, b2 = 12 N.s/m, K1 = 20 N/m, K2 = 35 N/m and P=1 N. Write a MATLAB program to produce the response curve x(t). (15 Marks)
mwu Q3. a) Consider the mechanical system shown, obtain the transfer function x(s)/P(s), assuming all initial conditions are zeros. (10 marks) Ž p3k, у b) For the question in part (a), assuming that m = 20 kg, b2 = 12 N.s/m, K1 = 20 N/m, K2 = 35 N/m and P=1 N. Write a MATLAB program to produce the response curve x(t). (15 Marks)
Question 1 Figure Q1 shows a mechanical system. The system input is T) and output is supposed to ...
 Please write down the steps by steps solution, thank
you!
Question 1 Figure Q1 shows a mechanical system. The system input is T) and output is supposed to be 0. Please find the transfer function from T to θ 3, and discuss the stability of the system if the input is a unit impulse signal. (30 marks) To 01(t) 01t) I kg-m2 N 10 030) N2 100 100 kg-m2 100 N-m/rad 100 N-m-s/rad Figure Q1
Question 1 Figure Q1 shows...
Please write down the steps by steps solution, thank
you!
Question 1 Figure Q1 shows a mechanical system. The system input is T) and output is supposed to be 0. Please find the transfer function from T to θ 3, and discuss the stability of the system if the input is a unit impulse signal. (30 marks) To 01(t) 01t) I kg-m2 N 10 030) N2 100 100 kg-m2 100 N-m/rad 100 N-m-s/rad Figure Q1
Question 1 Figure Q1 shows...
Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a)....
 Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Question 3 a) Develop the transfer function X2%)/F(s) of the mechanical system shown in Figure 3(a)....
 Question 3 a) Develop the transfer function X2%)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Question 3 a) Develop the transfer function X2%)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Question 3) Consider the mechanical system shown in figure, T(t) is the torque applied to shaft...
 Question 3) Consider the mechanical system shown in figure, T(t) is the torque applied to shaft 1 and z(t) is the rotation of shaft 2. J.Jz and Jz are the inertias of shafts 1,2 and 3 respectively, N,,N,N, and N, are the number of teeths of the gears,, D1, D, and D3 are the coefficient of viscous damping associated with shafts 1, 2 and 3 respectively, K is the spring constant of the torsional spring attached to shaft 3. Write...
Question 3) Consider the mechanical system shown in figure, T(t) is the torque applied to shaft 1 and z(t) is the rotation of shaft 2. J.Jz and Jz are the inertias of shafts 1,2 and 3 respectively, N,,N,N, and N, are the number of teeths of the gears,, D1, D, and D3 are the coefficient of viscous damping associated with shafts 1, 2 and 3 respectively, K is the spring constant of the torsional spring attached to shaft 3. Write...
Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure...
 Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in...
Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in...
a) Develop the transfer function X:(s)/F(s) of the mechanical system shown in Figure 3(a). Give and...
 a) Develop the transfer function X:(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate...
a) Develop the transfer function X:(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate...
question 1 Question 3 a) Develop the transfer function X (s)/F(s) of the mechanical system shown...
 question 1
Question 3 a) Develop the transfer function X (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as...
question 1
Question 3 a) Develop the transfer function X (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as...
 Q5 The equation of the motion of the mechanical system shown in the following figure is governed by the following differential equation d2 x dx m7+9+= -f(t) - 3kx dt2 dt where m, C and k are mass, damping coefficient and spring constant, respectively. Consider the system with m = 10 kg, c = 80 Ns/m, k = 50 N/m, and the system is at rest at time t = 0 s. f(t) is the external force acting on the...
Q5 The equation of the motion of the mechanical system shown in the following figure is governed by the following differential equation d2 x dx m7+9+= -f(t) - 3kx dt2 dt where m, C and k are mass, damping coefficient and spring constant, respectively. Consider the system with m = 10 kg, c = 80 Ns/m, k = 50 N/m, and the system is at rest at time t = 0 s. f(t) is the external force acting on the...
 mi k2 b yi m2 Figure 5-45 Mechanical system. Assuming that mi 10 kg, m2 5 kg, b 10 N-s/m, k 40 N/m, and k 20 N/m and that input force u is a constant force of 5 N, obtain the response of the sys- tem. Plot the response curves n(t) versus r and y2(t) versus t with MATLAB Problem B-5-23 Consider the system shown in Figure 5-45. The system is at rest for t < 0. The dis placements...
mi k2 b yi m2 Figure 5-45 Mechanical system. Assuming that mi 10 kg, m2 5 kg, b 10 N-s/m, k 40 N/m, and k 20 N/m and that input force u is a constant force of 5 N, obtain the response of the sys- tem. Plot the response curves n(t) versus r and y2(t) versus t with MATLAB Problem B-5-23 Consider the system shown in Figure 5-45. The system is at rest for t < 0. The dis placements...
 mwu Q3. a) Consider the mechanical system shown, obtain the transfer function x(s)/P(s), assuming all initial conditions are zeros. (10 marks) Ž p3k, у b) For the question in part (a), assuming that m = 20 kg, b2 = 12 N.s/m, K1 = 20 N/m, K2 = 35 N/m and P=1 N. Write a MATLAB program to produce the response curve x(t). (15 Marks)
mwu Q3. a) Consider the mechanical system shown, obtain the transfer function x(s)/P(s), assuming all initial conditions are zeros. (10 marks) Ž p3k, у b) For the question in part (a), assuming that m = 20 kg, b2 = 12 N.s/m, K1 = 20 N/m, K2 = 35 N/m and P=1 N. Write a MATLAB program to produce the response curve x(t). (15 Marks)
 Please write down the steps by steps solution, thank
you!
Question 1 Figure Q1 shows a mechanical system. The system input is T) and output is supposed to be 0. Please find the transfer function from T to θ 3, and discuss the stability of the system if the input is a unit impulse signal. (30 marks) To 01(t) 01t) I kg-m2 N 10 030) N2 100 100 kg-m2 100 N-m/rad 100 N-m-s/rad Figure Q1
Question 1 Figure Q1 shows...
Please write down the steps by steps solution, thank
you!
Question 1 Figure Q1 shows a mechanical system. The system input is T) and output is supposed to be 0. Please find the transfer function from T to θ 3, and discuss the stability of the system if the input is a unit impulse signal. (30 marks) To 01(t) 01t) I kg-m2 N 10 030) N2 100 100 kg-m2 100 N-m/rad 100 N-m-s/rad Figure Q1
Question 1 Figure Q1 shows...
 Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
 Question 3 a) Develop the transfer function X2%)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Question 3 a) Develop the transfer function X2%)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
 Question 3) Consider the mechanical system shown in figure, T(t) is the torque applied to shaft 1 and z(t) is the rotation of shaft 2. J.Jz and Jz are the inertias of shafts 1,2 and 3 respectively, N,,N,N, and N, are the number of teeths of the gears,, D1, D, and D3 are the coefficient of viscous damping associated with shafts 1, 2 and 3 respectively, K is the spring constant of the torsional spring attached to shaft 3. Write...
Question 3) Consider the mechanical system shown in figure, T(t) is the torque applied to shaft 1 and z(t) is the rotation of shaft 2. J.Jz and Jz are the inertias of shafts 1,2 and 3 respectively, N,,N,N, and N, are the number of teeths of the gears,, D1, D, and D3 are the coefficient of viscous damping associated with shafts 1, 2 and 3 respectively, K is the spring constant of the torsional spring attached to shaft 3. Write...
 Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in...
Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in...
 a) Develop the transfer function X:(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate...
a) Develop the transfer function X:(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate...
 question 1
Question 3 a) Develop the transfer function X (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as...
question 1
Question 3 a) Develop the transfer function X (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as...
Most questions answered within 3 hours.
-
Japan’s combination of X and Y
Canada’s combination of X and Y
100x and 0y
50x...
asked 1 minute ago -
Determine the temperature (in Celsius) at which 1.00 mole of an
ideal gas will have a...
asked 9 minutes ago -
[1] Household statistics include individuals living alone or in
groups in:
A) apartments.
B) military barracks....
asked 12 minutes ago -
What is the % w/v when 80 mL of a 2.0% solution is mixed with 50...
asked 15 minutes ago -
How can I solve the following using a TI83
Claim: Most adults would erase all of...
asked 28 minutes ago -
Analysis of 3-ethyl-3-buten-2-ol gave C, 72.13%; H, 11.92%.
Calculate the percent deviation of these results from...
asked 25 minutes ago -
Which VALS segment is most likely to have a top of the line
brand new (2015)...
asked 29 minutes ago -
Write a program to score the paper-rock-scissor game. Each of
two users types in either P,R...
asked 49 minutes ago -
Calculate the equillibrium constent K for a redox reaction that
has E°cell = -.98 V at...
asked 1 hour ago -
A concave spherical mirror has a radius of curvature of
magnitude 19.6 cm.
(a) Find the...
asked 1 hour ago -
3. draw a diagram of the magnetic field:
a. around a long straight wire with a...
asked 1 hour ago -
If you titrated 30.0 mL of 0.1 M HCl with 0.1 M NaOH, indicate
the approximate...
asked 1 hour ago