
Homework Answers


Add Answer to:
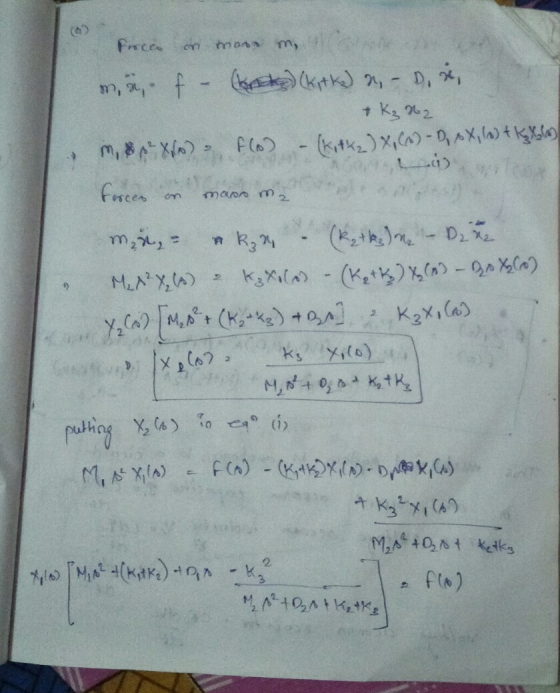
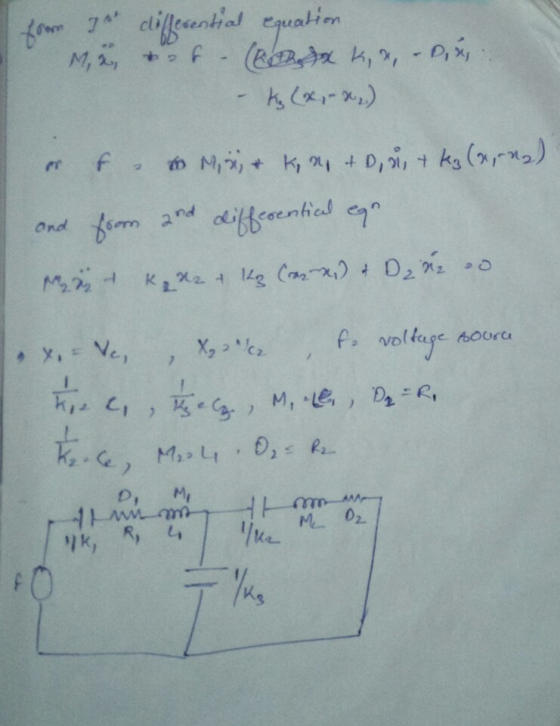
a) Develop the transfer function X:(s)/F(s) of the mechanical system shown in Figure 3(a). Give and...
Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a)....
 Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
question 1 Question 3 a) Develop the transfer function X (s)/F(s) of the mechanical system shown...
 question 1
Question 3 a) Develop the transfer function X (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as...
question 1
Question 3 a) Develop the transfer function X (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as...
Question 3 a) Develop the transfer function X2%)/F(s) of the mechanical system shown in Figure 3(a)....
 Question 3 a) Develop the transfer function X2%)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Question 3 a) Develop the transfer function X2%)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure...
 Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in...
Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in...
Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does...
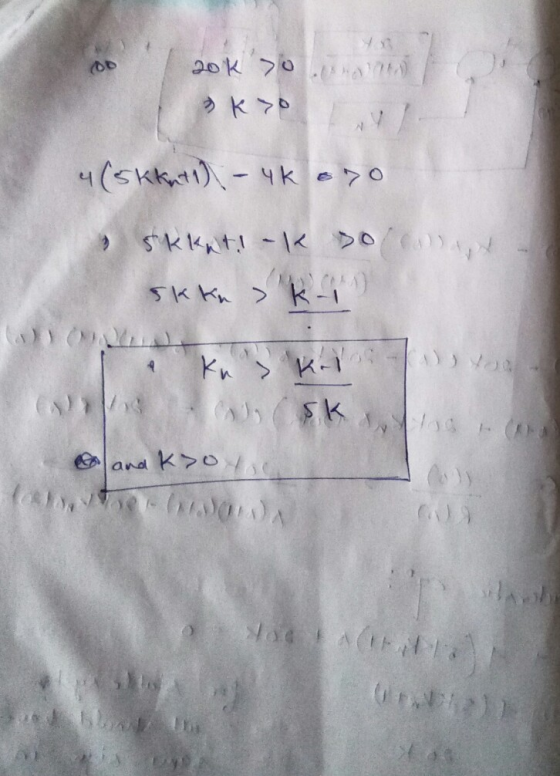
 Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate the ranges of stability for K and Kn. (Note that Kn must be positive). R(s) C(s) 20 (5 + 1) (8 + 4) $ KA
Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate the ranges of stability for K and Kn. (Note that Kn must be positive). R(s) C(s) 20 (5 + 1) (8 + 4) $ KA
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given...
 3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
Q2. Fig Q2 shows the block diagram of an unstable system with transfer function G(s) -...
 Q2. Fig Q2 shows the block diagram of an unstable system with transfer function G(s) - under the control of a lead compensator (a) Using the Routh's stability criterion, determine the conditions on k and a so that the closed-loop system is stable, and sketch the region on the (k, a)- plane where the conditions are satisfied. Hence, determine the minimum value of k for the lead compensator to be a feasible stabilizing controller. (10 marks) (b) Suppose α-2. Given...
Q2. Fig Q2 shows the block diagram of an unstable system with transfer function G(s) - under the control of a lead compensator (a) Using the Routh's stability criterion, determine the conditions on k and a so that the closed-loop system is stable, and sketch the region on the (k, a)- plane where the conditions are satisfied. Hence, determine the minimum value of k for the lead compensator to be a feasible stabilizing controller. (10 marks) (b) Suppose α-2. Given...
K2 K →X () На Figure 3: 3. (a) Find T(s) = xtransfer function by reducing...
 K2 K →X () На Figure 3: 3. (a) Find T(s) = xtransfer function by reducing the block diagram shown in Figure 3 for K; and H;s. (b) Find the positions of roots of the denominator polynomial of T(s) in s-plane by using Routh table (Routh-Hurwitz criteria) for Ki = , K2 = 1, H2 = 1 and H2 = 3+1 (C) Analyse the stability of the system and explain your findings.
K2 K →X () На Figure 3: 3. (a) Find T(s) = xtransfer function by reducing the block diagram shown in Figure 3 for K; and H;s. (b) Find the positions of roots of the denominator polynomial of T(s) in s-plane by using Routh table (Routh-Hurwitz criteria) for Ki = , K2 = 1, H2 = 1 and H2 = 3+1 (C) Analyse the stability of the system and explain your findings.
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5...
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
b) Following figure shows a block diagram of a control system. Obtain the characteristics equation of...
 b) Following figure shows a block diagram of a control system. Obtain the characteristics equation of the system. [5 marks] Determine the limiting value of K for stability using Routh's criterion. [10 marks] R(S) 20 C(s) 4K S +1 2s+1 0.2 Fig. Q3
b) Following figure shows a block diagram of a control system. Obtain the characteristics equation of the system. [5 marks] Determine the limiting value of K for stability using Routh's criterion. [10 marks] R(S) 20 C(s) 4K S +1 2s+1 0.2 Fig. Q3
 Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
 question 1
Question 3 a) Develop the transfer function X (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as...
question 1
Question 3 a) Develop the transfer function X (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as...
 Question 3 a) Develop the transfer function X2%)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Question 3 a) Develop the transfer function X2%)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
 Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in...
Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in...
 Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate the ranges of stability for K and Kn. (Note that Kn must be positive). R(s) C(s) 20 (5 + 1) (8 + 4) $ KA
Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate the ranges of stability for K and Kn. (Note that Kn must be positive). R(s) C(s) 20 (5 + 1) (8 + 4) $ KA
 3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
 Q2. Fig Q2 shows the block diagram of an unstable system with transfer function G(s) - under the control of a lead compensator (a) Using the Routh's stability criterion, determine the conditions on k and a so that the closed-loop system is stable, and sketch the region on the (k, a)- plane where the conditions are satisfied. Hence, determine the minimum value of k for the lead compensator to be a feasible stabilizing controller. (10 marks) (b) Suppose α-2. Given...
Q2. Fig Q2 shows the block diagram of an unstable system with transfer function G(s) - under the control of a lead compensator (a) Using the Routh's stability criterion, determine the conditions on k and a so that the closed-loop system is stable, and sketch the region on the (k, a)- plane where the conditions are satisfied. Hence, determine the minimum value of k for the lead compensator to be a feasible stabilizing controller. (10 marks) (b) Suppose α-2. Given...
 K2 K →X () На Figure 3: 3. (a) Find T(s) = xtransfer function by reducing the block diagram shown in Figure 3 for K; and H;s. (b) Find the positions of roots of the denominator polynomial of T(s) in s-plane by using Routh table (Routh-Hurwitz criteria) for Ki = , K2 = 1, H2 = 1 and H2 = 3+1 (C) Analyse the stability of the system and explain your findings.
K2 K →X () На Figure 3: 3. (a) Find T(s) = xtransfer function by reducing the block diagram shown in Figure 3 for K; and H;s. (b) Find the positions of roots of the denominator polynomial of T(s) in s-plane by using Routh table (Routh-Hurwitz criteria) for Ki = , K2 = 1, H2 = 1 and H2 = 3+1 (C) Analyse the stability of the system and explain your findings.
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
 b) Following figure shows a block diagram of a control system. Obtain the characteristics equation of the system. [5 marks] Determine the limiting value of K for stability using Routh's criterion. [10 marks] R(S) 20 C(s) 4K S +1 2s+1 0.2 Fig. Q3
b) Following figure shows a block diagram of a control system. Obtain the characteristics equation of the system. [5 marks] Determine the limiting value of K for stability using Routh's criterion. [10 marks] R(S) 20 C(s) 4K S +1 2s+1 0.2 Fig. Q3
Most questions answered within 3 hours.
-
At the beginning of the period, the Fabricating Department
budgeted direct labor of $136,500 and equipment...
asked 13 seconds ago -
PARTS A-D HAVE BEEN ANSWERED. WAS TOLD TO REPOST. ONLY ANSWER
PARTS E and F.
A...
asked 17 minutes ago -
2) You are given the task of finding a representation for a
circle in a drawing...
asked 1 hour ago -
STUDY QUESTION: Does use of diet drug fen-phen
(fenfluramine-phentermine) cause valvular heart disease?
HINT: Valvular heart...
asked 1 hour ago -
1. An object weighing 40 N rests on a surface. The coefficient
of friction is 0.35....
asked 2 hours ago -
Investor company owns 35% of investee company voting stock and
accounts for the investment under the...
asked 3 hours ago -
The number of major faults on a randomly chosen 1 km stretch of
highway has a...
asked 4 hours ago -
Consider the competitive environment of Starbuck's, Progressive
Insurance, a manufacturing firm with low turnover, or a...
asked 4 hours ago -
3. Gains from trade
Consider two neighbouring island countries called Euphoria and
Contente. They each have...
asked 6 hours ago -
A business executive has the option to invest money in two
plans: Plan A guarantees that...
asked 9 hours ago -
Hello, can someone please help me answer this question?
How much heat is absorbed by a...
asked 9 hours ago -
. A marketing researcher conducted a survey of 25 shoppers
randomly selected at the local mall...
asked 9 hours ago