
Homework Answers
![k3 1 m.8&destkett FB) = (mis-e Dis +($i+ky)] 88) – K3X$ya = { mus++25+kusky) - King (8) My SPD254*+ K3 FO= (0,8 +0,5 +K1+13)[](http://img.homeworklib.com/questions/e0c7c4a0-0418-11eb-99e7-935b0fd98b59.png?x-oss-process=image/resize,w_560)
Add Answer to:
question 1
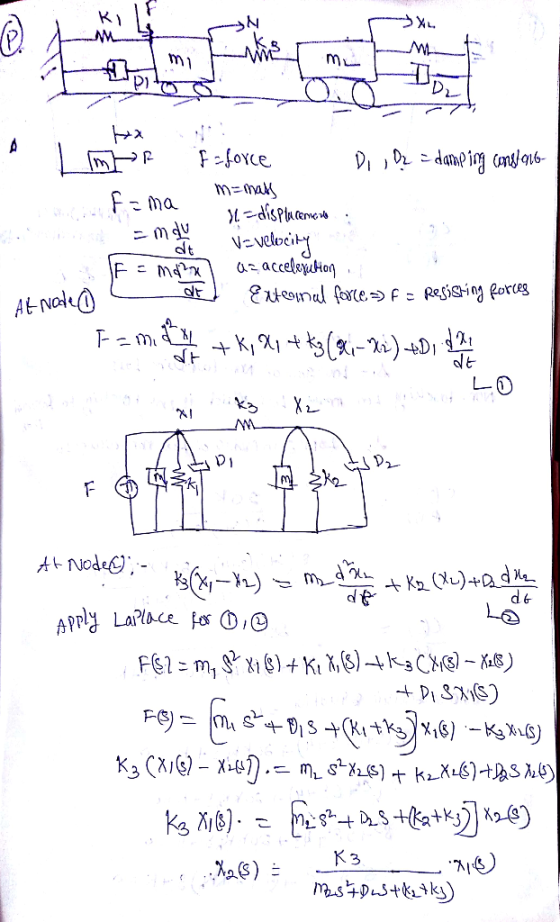
Question 3 a) Develop the transfer function X (s)/F(s) of the mechanical system shown...
Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure...
 Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in...
Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in...
a) Develop the transfer function X:(s)/F(s) of the mechanical system shown in Figure 3(a). Give and...
 a) Develop the transfer function X:(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate...
a) Develop the transfer function X:(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate...
Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a)....
 Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Question 3 a) Develop the transfer function X2%)/F(s) of the mechanical system shown in Figure 3(a)....
 Question 3 a) Develop the transfer function X2%)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Question 3 a) Develop the transfer function X2%)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does...
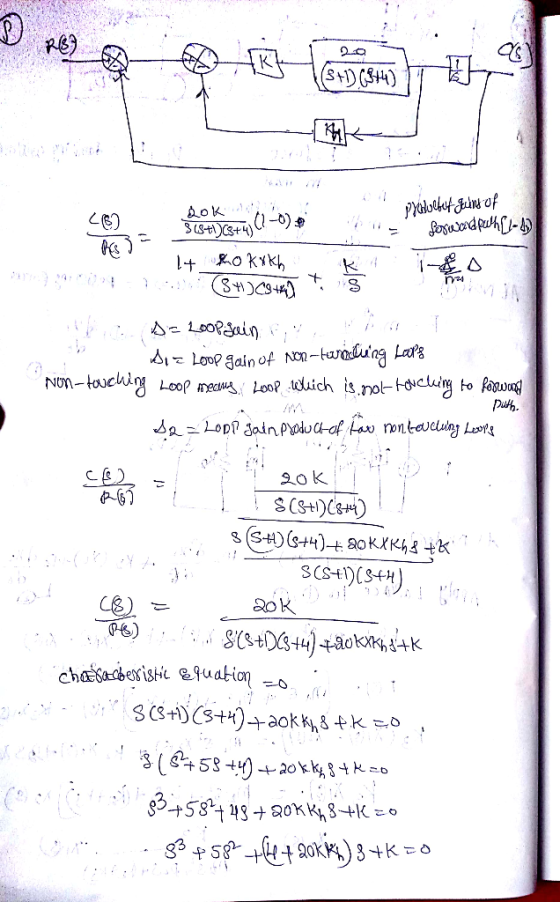
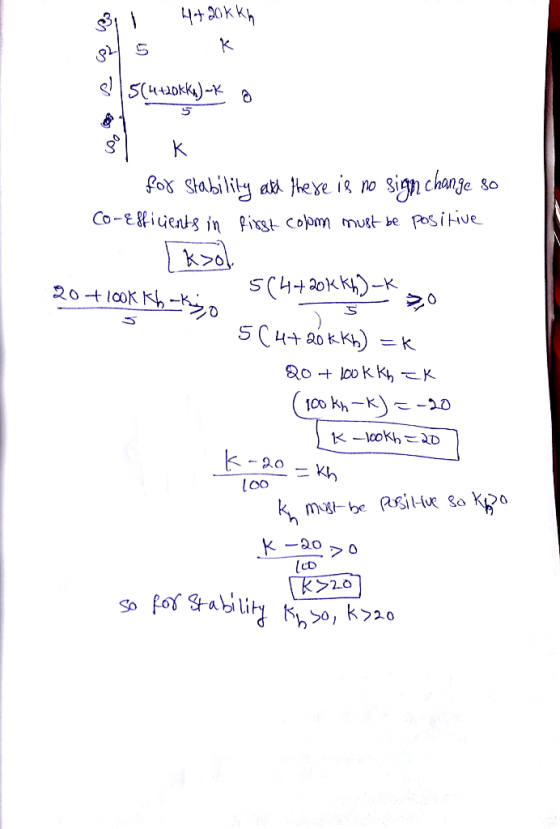
 Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate the ranges of stability for K and Kn. (Note that Kn must be positive). R(s) C(s) 20 (5 + 1) (8 + 4) $ KA
Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate the ranges of stability for K and Kn. (Note that Kn must be positive). R(s) C(s) 20 (5 + 1) (8 + 4) $ KA
Question 3 (35 marks) Consider a mechanical system shown in Figure 3. The system is at rest for t
 Question 3 (35 marks) Consider a mechanical system shown in Figure 3. The system is at rest for t<0. The input force f is applied at 0. The displacement x is the output of the system and is measured from the equilibrium position. kI b2 bi it Figure 3. Schematic of a mechanical system. (a) Obtain the traf) (10 marks) X (s) F(s) (b) Use of force-voltage analogy, obtain the equations for an electrical system (5 marks) (c) Draw a...
Question 3 (35 marks) Consider a mechanical system shown in Figure 3. The system is at rest for t<0. The input force f is applied at 0. The displacement x is the output of the system and is measured from the equilibrium position. kI b2 bi it Figure 3. Schematic of a mechanical system. (a) Obtain the traf) (10 marks) X (s) F(s) (b) Use of force-voltage analogy, obtain the equations for an electrical system (5 marks) (c) Draw a...
5. Find the transfer function X (3) F(s) and X:(5) F(s) for the mechanical system below...
 5. Find the transfer function X (3) F(s) and X:(5) F(s) for the mechanical system below Kj = 4 N/m *(1) K2 = 5 N/m 00002 0000 = 3 N-s/m M =1 kg|fv2 = 3 N-s/m M2 = 2 kg Svz = 2 N-s/m E
5. Find the transfer function X (3) F(s) and X:(5) F(s) for the mechanical system below Kj = 4 N/m *(1) K2 = 5 N/m 00002 0000 = 3 N-s/m M =1 kg|fv2 = 3 N-s/m M2 = 2 kg Svz = 2 N-s/m E
Q2. Fig Q2 shows the block diagram of an unstable system with transfer function G(s) -...
 Q2. Fig Q2 shows the block diagram of an unstable system with transfer function G(s) - under the control of a lead compensator (a) Using the Routh's stability criterion, determine the conditions on k and a so that the closed-loop system is stable, and sketch the region on the (k, a)- plane where the conditions are satisfied. Hence, determine the minimum value of k for the lead compensator to be a feasible stabilizing controller. (10 marks) (b) Suppose α-2. Given...
Q2. Fig Q2 shows the block diagram of an unstable system with transfer function G(s) - under the control of a lead compensator (a) Using the Routh's stability criterion, determine the conditions on k and a so that the closed-loop system is stable, and sketch the region on the (k, a)- plane where the conditions are satisfied. Hence, determine the minimum value of k for the lead compensator to be a feasible stabilizing controller. (10 marks) (b) Suppose α-2. Given...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5...
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given...
 3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
 Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in...
Question 3 a) Develop the transfer function X. (s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in...
 a) Develop the transfer function X:(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate...
a) Develop the transfer function X:(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate...
 Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Question 3 a) Develop the transfer function X,(s)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system. (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
 Question 3 a) Develop the transfer function X2%)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
Question 3 a) Develop the transfer function X2%)/F(s) of the mechanical system shown in Figure 3(a). Give and explain one example the real application where you can relate with this system (5 marks) b) Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure...
 Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate the ranges of stability for K and Kn. (Note that Kn must be positive). R(s) C(s) 20 (5 + 1) (8 + 4) $ KA
Routh's stability criterion is of limited usefulness in linear control systems analysis mainly because it does not suggest how to stabilize an unstable system. Thus, we should evaluate the stability range of a parameter value. Consider the servo system with tachometer feedback as shown in Figure 3(b). Evaluate the ranges of stability for K and Kn. (Note that Kn must be positive). R(s) C(s) 20 (5 + 1) (8 + 4) $ KA
 Question 3 (35 marks) Consider a mechanical system shown in Figure 3. The system is at rest for t<0. The input force f is applied at 0. The displacement x is the output of the system and is measured from the equilibrium position. kI b2 bi it Figure 3. Schematic of a mechanical system. (a) Obtain the traf) (10 marks) X (s) F(s) (b) Use of force-voltage analogy, obtain the equations for an electrical system (5 marks) (c) Draw a...
Question 3 (35 marks) Consider a mechanical system shown in Figure 3. The system is at rest for t<0. The input force f is applied at 0. The displacement x is the output of the system and is measured from the equilibrium position. kI b2 bi it Figure 3. Schematic of a mechanical system. (a) Obtain the traf) (10 marks) X (s) F(s) (b) Use of force-voltage analogy, obtain the equations for an electrical system (5 marks) (c) Draw a...
 5. Find the transfer function X (3) F(s) and X:(5) F(s) for the mechanical system below Kj = 4 N/m *(1) K2 = 5 N/m 00002 0000 = 3 N-s/m M =1 kg|fv2 = 3 N-s/m M2 = 2 kg Svz = 2 N-s/m E
5. Find the transfer function X (3) F(s) and X:(5) F(s) for the mechanical system below Kj = 4 N/m *(1) K2 = 5 N/m 00002 0000 = 3 N-s/m M =1 kg|fv2 = 3 N-s/m M2 = 2 kg Svz = 2 N-s/m E
 Q2. Fig Q2 shows the block diagram of an unstable system with transfer function G(s) - under the control of a lead compensator (a) Using the Routh's stability criterion, determine the conditions on k and a so that the closed-loop system is stable, and sketch the region on the (k, a)- plane where the conditions are satisfied. Hence, determine the minimum value of k for the lead compensator to be a feasible stabilizing controller. (10 marks) (b) Suppose α-2. Given...
Q2. Fig Q2 shows the block diagram of an unstable system with transfer function G(s) - under the control of a lead compensator (a) Using the Routh's stability criterion, determine the conditions on k and a so that the closed-loop system is stable, and sketch the region on the (k, a)- plane where the conditions are satisfied. Hence, determine the minimum value of k for the lead compensator to be a feasible stabilizing controller. (10 marks) (b) Suppose α-2. Given...
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
 3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
3. For the feedback control system shown in Figure Q3 below, the forward-path transfer function given by G(s) and the sensor transfer function is given by H(s). R(s) C(s) G(s) H(s) Figure Q3 It is known that G(s) -- K(+20) S(+5) H(s) = and K is the proportional gain. (S+10) i. Determine the closed-loop transfer function and hence the characteristic equation of the system. [6 marks] ii. Using the Routh-Hurwitz criterion, determine the stability of the closed-loop system. Determine the...
Most questions answered within 3 hours.
-
Create a balanced compensation plan that you feel would
encourage a restaurant manager to be more...
asked 3 minutes ago -
Re: Human Physiology
Comment on the differences between representing V02 max as an
absolute number and...
asked 5 minutes ago -
A firm with a WACC of 10% is considering the following mutually
exclusive projects:
0
1...
asked 10 minutes ago -
. A 100.0 mL sample of 0.18 M HClO4 is titrated with 0.27 M
LiOH. Determine...
asked 33 minutes ago -
A regression equation that describes the relationship between
the amount of the bill ($) at a...
asked 1 hour ago -
exercise on VSEPR and molecular structrue.
octahedral
SeCl62-
TeCl62-
ClF62-
distorted
SeF62–
IF6–
asked 2 hours ago -
284 mL of a 0.52 M potassium hydroxide solution is added to 467
mL of a...
asked 1 hour ago -
Little’s Law: Val d’Costa is a world famous ski village in the
French Alps. Because of...
asked 2 hours ago -
Find the absolute error D for the calculation if A + B/C=D A=
9.4 +/- 0.4...
asked 3 hours ago -
New Air Heating and Cooling, manufactures furnaces and central
air units. The company pride itself on...
asked 3 hours ago -
A coach uses a new technique to train gymnasts. Seven
gymnasts were randomly selected and their...
asked 5 hours ago -
While rotating the tires on your car you notice a rock [mass =
0.1 Kg] stuck...
asked 7 hours ago