
Homework Answers






Add Answer to:
Problem 2: For a unity feedback system where the plant is defined as G(s) K s(s+3)(s...
b) The Nyquist plot of a unity feedback control system is as shown in Figure Q5(b)....
 b) The Nyquist plot of a unity feedback control system is as shown in Figure Q5(b). Nyqulst Diagram x 10 1.5 1- System: N Real: -9.08e-005 0.5- Imag: -5.62e-006 Frequency (rad/sec): -104 -0.5 -15 -1.5 0.5 0.5 1.5 1 2.5 3.5 Real Axis x 10 Figure Q5(b) K If the transfer function of the system is given as G(s) (s+10)(s+50)(s+150) determine the following: The closed loop stability of the system using Nyquist Stability Criterion. i) ii) Gain margin and phase...
b) The Nyquist plot of a unity feedback control system is as shown in Figure Q5(b). Nyqulst Diagram x 10 1.5 1- System: N Real: -9.08e-005 0.5- Imag: -5.62e-006 Frequency (rad/sec): -104 -0.5 -15 -1.5 0.5 0.5 1.5 1 2.5 3.5 Real Axis x 10 Figure Q5(b) K If the transfer function of the system is given as G(s) (s+10)(s+50)(s+150) determine the following: The closed loop stability of the system using Nyquist Stability Criterion. i) ii) Gain margin and phase...
A unity feedback control system has the following open loop transfer function, K L(s) .If K 10, evaluate the stability...
 A unity feedback control system has the following open loop transfer function, K L(s) .If K 10, evaluate the stability condition of the system using the s(s-1) Nyquist stability criterion.
A unity feedback control system has the following open loop transfer function, K L(s) .If K 10, evaluate the stability condition of the system using the s(s-1) Nyquist stability criterion.
A unity feedback control system has the following open loop transfer function, K L(s) .If K 10, evaluate the stability condition of the system using the s(s-1) Nyquist stability criterion.
A unity feedback control system has the following open loop transfer function, K L(s) .If K 10, evaluate the stability condition of the system using the s(s-1) Nyquist stability criterion.
For the unity feedback system in the below figure, 1. EGO) R(s)) C(s) G(s)K (s 1) (s + 4) a) Sket...
 For the unity feedback system in the below figure, 1. EGO) R(s)) C(s) G(s)K (s 1) (s + 4) a) Sketch the bode plot with Matlab command bode0 b) Plot the nyquist diagram using Matlab command nyquist(0, find the system stability c) Find phase margin, gain margin, and crossover frequencies using Matlab command margin(0 and find the system stability
For the unity feedback system in the below figure, 1. EGO) R(s)) C(s) G(s)K (s 1) (s + 4) a) Sketch...
For the unity feedback system in the below figure, 1. EGO) R(s)) C(s) G(s)K (s 1) (s + 4) a) Sketch the bode plot with Matlab command bode0 b) Plot the nyquist diagram using Matlab command nyquist(0, find the system stability c) Find phase margin, gain margin, and crossover frequencies using Matlab command margin(0 and find the system stability
For the unity feedback system in the below figure, 1. EGO) R(s)) C(s) G(s)K (s 1) (s + 4) a) Sketch...
2. Given a unity feedback system with open-loop transfer function s+40s-I) a) For K-1, derive the...
 2. Given a unity feedback system with open-loop transfer function s+40s-I) a) For K-1, derive the expressions for the real and imaginary parts of G(jo). b) What happen to the real and imaginary parts of G(jo) for ω 0 and for Are there values of ω that either the real or imaginary part goes to zero? If not, compute Gijo) for some ovalue, say,, or 2, to help you sketch the Polar plot of Gja). c) d) Use Matlab to...
2. Given a unity feedback system with open-loop transfer function s+40s-I) a) For K-1, derive the expressions for the real and imaginary parts of G(jo). b) What happen to the real and imaginary parts of G(jo) for ω 0 and for Are there values of ω that either the real or imaginary part goes to zero? If not, compute Gijo) for some ovalue, say,, or 2, to help you sketch the Polar plot of Gja). c) d) Use Matlab to...
Question 5 or a unity feedback system in Figure 4 C(s) (s+40%s +100) Figure 4 a) Find the value o...
 Question 5 or a unity feedback system in Figure 4 C(s) (s+40%s +100) Figure 4 a) Find the value of gain, K, to yield a closed-loop response with 20% overshoot when the system is under a step input. Check the system stability at this gain value (use either Nyquist criterion or Margins). Assume the system is under a unity step input. Use Simulink to obtain and compare the time responses with and without gain adjustment and discuss how the response...
Question 5 or a unity feedback system in Figure 4 C(s) (s+40%s +100) Figure 4 a) Find the value of gain, K, to yield a closed-loop response with 20% overshoot when the system is under a step input. Check the system stability at this gain value (use either Nyquist criterion or Margins). Assume the system is under a unity step input. Use Simulink to obtain and compare the time responses with and without gain adjustment and discuss how the response...
Control System Problem. Please do part A, B , and C. Consider the unity-feedback system with...
 Control System Problem. Please do part A, B , and C.
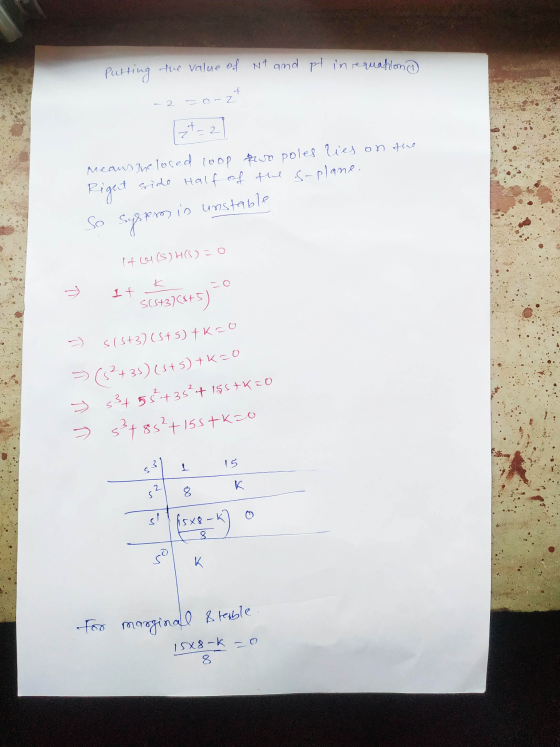
Consider the unity-feedback system with G(s)-K(st3)(s+5)/(s+(s-7)] Sketch the root locus of this system, clearly finding any asymptotes and calculating any break-in or break-away point:s. Determine the range of gain (K) to ensure that the system is stable Draw the Nyquist diagram of this system, only considering the imaginary axis of the original RHP contour (i.e. between points A and B on the original contour). Hint: You will want to...
Control System Problem. Please do part A, B , and C.
Consider the unity-feedback system with G(s)-K(st3)(s+5)/(s+(s-7)] Sketch the root locus of this system, clearly finding any asymptotes and calculating any break-in or break-away point:s. Determine the range of gain (K) to ensure that the system is stable Draw the Nyquist diagram of this system, only considering the imaginary axis of the original RHP contour (i.e. between points A and B on the original contour). Hint: You will want to...
2:50 PM Sun May 12 89%- X 2012 Spring All Exams.pdf 5. (30 pts) A unity feedback system has the loop transfer function shown below. a) Draw the complete Nyquist HG(s)-plane plot for both small K...
 2:50 PM Sun May 12 89%- X 2012 Spring All Exams.pdf 5. (30 pts) A unity feedback system has the loop transfer function shown below. a) Draw the complete Nyquist HG(s)-plane plot for both small K and large K. Use the Nyquist Path which encloses the pole of HG(s) that is at the origin. No other path will be accepted. b) Determine whether the closed loop system is stable for both small K and large Argue in terms of the...
2:50 PM Sun May 12 89%- X 2012 Spring All Exams.pdf 5. (30 pts) A unity feedback system has the loop transfer function shown below. a) Draw the complete Nyquist HG(s)-plane plot for both small K and large K. Use the Nyquist Path which encloses the pole of HG(s) that is at the origin. No other path will be accepted. b) Determine whether the closed loop system is stable for both small K and large Argue in terms of the...
Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() =...
 Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
A unity feedback control system has the open loop TF as
A unity feedback control system has the open loop TF as: \(G(s)=\frac{K(s+a+1)(s+b)}{s(s+a)(s+a+2)}\)a) Find analytical expressions for the magnitude and phase response for \(\mathrm{G}(\mathrm{s}) .\left[K=K_{1}\right]\)b) Make a plot of the log-magnitude and the phase, using log-frequency in rad/s as the ordinate. \(\left[K=K_{1}\right]\)c) Sketch the Bode asymptotic magnitude and asymptotic phase plots. \(\left[K=K_{1}\right]\)d) Compare the results from \((a),(b)\), and \((c) .\left[K=K_{1}\right]\)e) Using the Nyquist criterion, find out if system is stable. Show your steps. \(\left[K=K_{1}\right]\)f) Using the Nyquist criterion, find the range...
3. Given the unity feedback system, where G(s) = s(s +2) (s+3)(s +4) do the following:...
 3. Given the unity feedback system, where G(s) = s(s +2) (s+3)(s +4) do the following: (a) Sketch the root locus (b) Find the asymptotes c) Find the value of gain that will make the system marginally stable (d) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at-0.5
3. Given the unity feedback system, where G(s) = s(s +2) (s+3)(s +4) do the following: (a) Sketch the root locus (b) Find the asymptotes c) Find the value of gain that will make the system marginally stable (d) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at-0.5
 b) The Nyquist plot of a unity feedback control system is as shown in Figure Q5(b). Nyqulst Diagram x 10 1.5 1- System: N Real: -9.08e-005 0.5- Imag: -5.62e-006 Frequency (rad/sec): -104 -0.5 -15 -1.5 0.5 0.5 1.5 1 2.5 3.5 Real Axis x 10 Figure Q5(b) K If the transfer function of the system is given as G(s) (s+10)(s+50)(s+150) determine the following: The closed loop stability of the system using Nyquist Stability Criterion. i) ii) Gain margin and phase...
b) The Nyquist plot of a unity feedback control system is as shown in Figure Q5(b). Nyqulst Diagram x 10 1.5 1- System: N Real: -9.08e-005 0.5- Imag: -5.62e-006 Frequency (rad/sec): -104 -0.5 -15 -1.5 0.5 0.5 1.5 1 2.5 3.5 Real Axis x 10 Figure Q5(b) K If the transfer function of the system is given as G(s) (s+10)(s+50)(s+150) determine the following: The closed loop stability of the system using Nyquist Stability Criterion. i) ii) Gain margin and phase...
 A unity feedback control system has the following open loop transfer function, K L(s) .If K 10, evaluate the stability condition of the system using the s(s-1) Nyquist stability criterion.
A unity feedback control system has the following open loop transfer function, K L(s) .If K 10, evaluate the stability condition of the system using the s(s-1) Nyquist stability criterion.
A unity feedback control system has the following open loop transfer function, K L(s) .If K 10, evaluate the stability condition of the system using the s(s-1) Nyquist stability criterion.
A unity feedback control system has the following open loop transfer function, K L(s) .If K 10, evaluate the stability condition of the system using the s(s-1) Nyquist stability criterion.
 For the unity feedback system in the below figure, 1. EGO) R(s)) C(s) G(s)K (s 1) (s + 4) a) Sketch the bode plot with Matlab command bode0 b) Plot the nyquist diagram using Matlab command nyquist(0, find the system stability c) Find phase margin, gain margin, and crossover frequencies using Matlab command margin(0 and find the system stability
For the unity feedback system in the below figure, 1. EGO) R(s)) C(s) G(s)K (s 1) (s + 4) a) Sketch...
For the unity feedback system in the below figure, 1. EGO) R(s)) C(s) G(s)K (s 1) (s + 4) a) Sketch the bode plot with Matlab command bode0 b) Plot the nyquist diagram using Matlab command nyquist(0, find the system stability c) Find phase margin, gain margin, and crossover frequencies using Matlab command margin(0 and find the system stability
For the unity feedback system in the below figure, 1. EGO) R(s)) C(s) G(s)K (s 1) (s + 4) a) Sketch...
 2. Given a unity feedback system with open-loop transfer function s+40s-I) a) For K-1, derive the expressions for the real and imaginary parts of G(jo). b) What happen to the real and imaginary parts of G(jo) for ω 0 and for Are there values of ω that either the real or imaginary part goes to zero? If not, compute Gijo) for some ovalue, say,, or 2, to help you sketch the Polar plot of Gja). c) d) Use Matlab to...
2. Given a unity feedback system with open-loop transfer function s+40s-I) a) For K-1, derive the expressions for the real and imaginary parts of G(jo). b) What happen to the real and imaginary parts of G(jo) for ω 0 and for Are there values of ω that either the real or imaginary part goes to zero? If not, compute Gijo) for some ovalue, say,, or 2, to help you sketch the Polar plot of Gja). c) d) Use Matlab to...
 Question 5 or a unity feedback system in Figure 4 C(s) (s+40%s +100) Figure 4 a) Find the value of gain, K, to yield a closed-loop response with 20% overshoot when the system is under a step input. Check the system stability at this gain value (use either Nyquist criterion or Margins). Assume the system is under a unity step input. Use Simulink to obtain and compare the time responses with and without gain adjustment and discuss how the response...
Question 5 or a unity feedback system in Figure 4 C(s) (s+40%s +100) Figure 4 a) Find the value of gain, K, to yield a closed-loop response with 20% overshoot when the system is under a step input. Check the system stability at this gain value (use either Nyquist criterion or Margins). Assume the system is under a unity step input. Use Simulink to obtain and compare the time responses with and without gain adjustment and discuss how the response...
 Control System Problem. Please do part A, B , and C.
Consider the unity-feedback system with G(s)-K(st3)(s+5)/(s+(s-7)] Sketch the root locus of this system, clearly finding any asymptotes and calculating any break-in or break-away point:s. Determine the range of gain (K) to ensure that the system is stable Draw the Nyquist diagram of this system, only considering the imaginary axis of the original RHP contour (i.e. between points A and B on the original contour). Hint: You will want to...
Control System Problem. Please do part A, B , and C.
Consider the unity-feedback system with G(s)-K(st3)(s+5)/(s+(s-7)] Sketch the root locus of this system, clearly finding any asymptotes and calculating any break-in or break-away point:s. Determine the range of gain (K) to ensure that the system is stable Draw the Nyquist diagram of this system, only considering the imaginary axis of the original RHP contour (i.e. between points A and B on the original contour). Hint: You will want to...
 2:50 PM Sun May 12 89%- X 2012 Spring All Exams.pdf 5. (30 pts) A unity feedback system has the loop transfer function shown below. a) Draw the complete Nyquist HG(s)-plane plot for both small K and large K. Use the Nyquist Path which encloses the pole of HG(s) that is at the origin. No other path will be accepted. b) Determine whether the closed loop system is stable for both small K and large Argue in terms of the...
2:50 PM Sun May 12 89%- X 2012 Spring All Exams.pdf 5. (30 pts) A unity feedback system has the loop transfer function shown below. a) Draw the complete Nyquist HG(s)-plane plot for both small K and large K. Use the Nyquist Path which encloses the pole of HG(s) that is at the origin. No other path will be accepted. b) Determine whether the closed loop system is stable for both small K and large Argue in terms of the...
 Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
Consider the unity feedback system is given below R(S) C(s) G(s) with transfer function: G() = K(+2) s(s+ 1/s + 3)(+5) a) Sketch the root locus. Clearly indicate any asymptotes. b) Find the value of the gain K, that will make the system marginally stable. c) Find the value of the gain K, for which the closed-loop transfer function will have a pole on the real axis at (-0.5).
 3. Given the unity feedback system, where G(s) = s(s +2) (s+3)(s +4) do the following: (a) Sketch the root locus (b) Find the asymptotes c) Find the value of gain that will make the system marginally stable (d) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at-0.5
3. Given the unity feedback system, where G(s) = s(s +2) (s+3)(s +4) do the following: (a) Sketch the root locus (b) Find the asymptotes c) Find the value of gain that will make the system marginally stable (d) Find the value of gain for which the closed-loop transfer function will have a pole on the real axis at-0.5
Most questions answered within 3 hours.
-
3) What are the typical social structures in a global city?
asked 1 hour ago -
Luther Corporation
Consolidated Balance Sheet
December 31, 2019 and 2018 (in $ millions)
Assets
2019
2018...
asked 1 hour ago -
(Expected rate of return and risk) Carter Inc. is evaluating a
security. Calculate the investment’s expected...
asked 4 hours ago -
What specific indicators can point to lack of progress for
African Americans in American society?
asked 5 hours ago -
1-The Electrons in a beam are moving at 2.7×108 m/s in an
electric field of 15000...
asked 5 hours ago -
A gas tank is a vertical cylinder. It has a radius of 1m, a
height of...
asked 6 hours ago -
Accent Software faces the following conditions. All of these
support Accent’s use of a market-penetration pricing...
asked 7 hours ago -
A mathematically inclined friend emails you the following
instructions: "Meet me in the cafeteria the first...
asked 7 hours ago -
A monopoly sells in two countries . The demand curves in the two
countries are p1...
asked 8 hours ago -
A .15kg rubber ball is bounced off a wall. Before hitting the
wall, the ball moves...
asked 8 hours ago -
A manufacturing company preparing to build a new plant is
considering three potential locations for it....
asked 8 hours ago -
B. If compound Y has approximately the same values of solubility
in toluene as compound X,...
asked 9 hours ago