
Homework Answers

Add Answer to:
6.7 For the control system shown in Fig. P6.7, determine the percentage overshoot to a step...
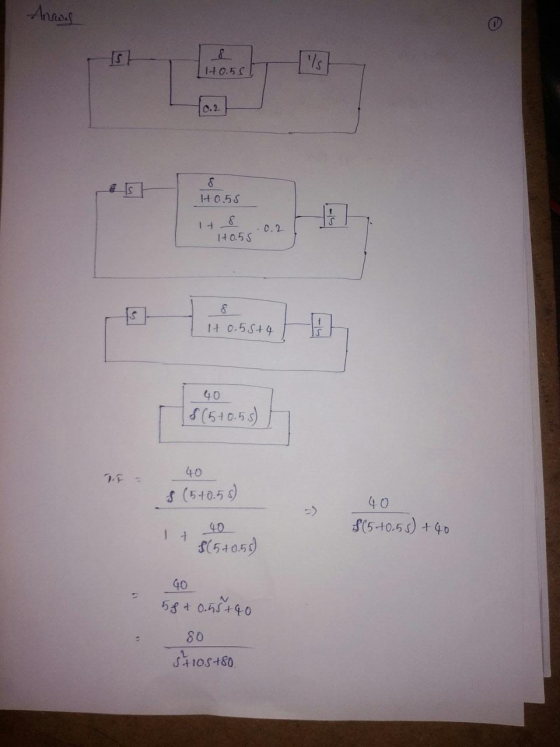
For the system shown in Fig Q2. Determine the output c(t) when r(t) is: 2. (10...
 For the system shown in Fig Q2. Determine the output c(t) when r(t) is: 2. (10 marks) (15 marks) i. A step input of magnitude A ii. A unit ramp input. In each case sketch the expected output response c(t) based on the input r(t). C(s) Fig Q2
For the system shown in Fig Q2. Determine the output c(t) when r(t) is: 2. (10 marks) (15 marks) i. A step input of magnitude A ii. A unit ramp input. In each case sketch the expected output response c(t) based on the input r(t). C(s) Fig Q2
CP5.4 Consider the control system shown in Figure CP5.4 (a) Show analytically that the expected p...
 CP5.4 Consider the control system shown in Figure CP5.4 (a) Show analytically that the expected percent over- shoot of the closed-loop system response to a unit b) Develop an m-file to plot the unit step response cent overshoot from the plot. Compare the result step input is about 50%. of the closed-loop system and estimate the per with part (a) Controller Process 21 42 FIGURE CP5.4 A negative feedback control system
CP5.4 Consider the control system shown in Figure CP5.4...
CP5.4 Consider the control system shown in Figure CP5.4 (a) Show analytically that the expected percent over- shoot of the closed-loop system response to a unit b) Develop an m-file to plot the unit step response cent overshoot from the plot. Compare the result step input is about 50%. of the closed-loop system and estimate the per with part (a) Controller Process 21 42 FIGURE CP5.4 A negative feedback control system
CP5.4 Consider the control system shown in Figure CP5.4...
Compensator Plant 100 R(s) sta Y(s) For the unity feedback system shown in Fig. 3.55, specify t...
 Compensator Plant 100 R(s) sta Y(s) For the unity feedback system shown in Fig. 3.55, specify the gain and pole location of the compensator so that the overall closed-loop response to a unit- step input has an overshoot of no more than 30%, and a 2% settling time of no more than 0.2 sec. Verify your design using Matlab. 3.27
Compensator Plant 100 R(s) sta Y(s)
For the unity feedback system shown in Fig. 3.55, specify the gain and pole...
Compensator Plant 100 R(s) sta Y(s) For the unity feedback system shown in Fig. 3.55, specify the gain and pole location of the compensator so that the overall closed-loop response to a unit- step input has an overshoot of no more than 30%, and a 2% settling time of no more than 0.2 sec. Verify your design using Matlab. 3.27
Compensator Plant 100 R(s) sta Y(s)
For the unity feedback system shown in Fig. 3.55, specify the gain and pole...
Question three The figure below shows a unit step response of a second order system. From...
 Question three The figure below shows a unit step response of a second order system. From the graph of response find: 1- The rise timet, 2- The peak timet, 3- The maximum overshoot Mp 4- The damped natural frequency w 5. The transfer function. Hence find the damping ratio ζ and the natural frequency ah-Find also the transfer function of the system. r 4 02 15 25 35 45 Question Four For the control system shown in the figure below,...
Question three The figure below shows a unit step response of a second order system. From the graph of response find: 1- The rise timet, 2- The peak timet, 3- The maximum overshoot Mp 4- The damped natural frequency w 5. The transfer function. Hence find the damping ratio ζ and the natural frequency ah-Find also the transfer function of the system. r 4 02 15 25 35 45 Question Four For the control system shown in the figure below,...
For the closed-loop system shown, and given: C(s) 8.41 s+8.10 G(8 2 0.02 3.00 2out G(s) C(s) control plant Part A-Plant 1% settling time Find the 1% settling time of the plant G(s) to a unit step inp...
 For the closed-loop system shown, and given: C(s) 8.41 s+8.10 G(8 2 0.02 3.00 2out G(s) C(s) control plant Part A-Plant 1% settling time Find the 1% settling time of the plant G(s) to a unit step input. 15.38 t,3% - Submit X ncorrect; Try Again - Part B Plant: Overshoot Find the overshoot of the plant G(s)to a unit step input. Give your answer as a percentage Mp: | Value Units Submit Request Answer Part C - Closed-loop system:...
For the closed-loop system shown, and given: C(s) 8.41 s+8.10 G(8 2 0.02 3.00 2out G(s) C(s) control plant Part A-Plant 1% settling time Find the 1% settling time of the plant G(s) to a unit step input. 15.38 t,3% - Submit X ncorrect; Try Again - Part B Plant: Overshoot Find the overshoot of the plant G(s)to a unit step input. Give your answer as a percentage Mp: | Value Units Submit Request Answer Part C - Closed-loop system:...
1: The plot shown below represents the step response of a second-order LTI system (with input...
 1: The plot shown below represents the step response of a second-order LTI system (with input (t) and output y(t)) with zero initial conditions. From the step response: (a) Estimate the peak time tp, and the maximum percentage overshoot %Mp. (b) Estimate the natural frequency wn and the damping ratio c. (c) Derive a differential equation corresponding to this system using the results of parts (a) and (b). Step Response X: 085 Y: 1.261 Amplitude 0 0.5 1 1.5 2...
1: The plot shown below represents the step response of a second-order LTI system (with input (t) and output y(t)) with zero initial conditions. From the step response: (a) Estimate the peak time tp, and the maximum percentage overshoot %Mp. (b) Estimate the natural frequency wn and the damping ratio c. (c) Derive a differential equation corresponding to this system using the results of parts (a) and (b). Step Response X: 085 Y: 1.261 Amplitude 0 0.5 1 1.5 2...
Problem 4. Consider the control system shown below with plant G(s) that has time con- stants...
 Problem 4. Consider the control system shown below with plant G(s) that has time con- stants T1 = 2, T2 = 10, and gain k = 0.1. 4 673 +1679+1) (1.) Sketch the pole-zero plot for G(s). Is one of the poles more dominant? Using MATLAB, simulate the step response of the plant itself, along with G1(s) and G2(s) as defined by Gl(s) = and G2(s) = sti + 1 ST2+1 (2.) Design a proportional gain C(s) = K so...
Problem 4. Consider the control system shown below with plant G(s) that has time con- stants T1 = 2, T2 = 10, and gain k = 0.1. 4 673 +1679+1) (1.) Sketch the pole-zero plot for G(s). Is one of the poles more dominant? Using MATLAB, simulate the step response of the plant itself, along with G1(s) and G2(s) as defined by Gl(s) = and G2(s) = sti + 1 ST2+1 (2.) Design a proportional gain C(s) = K so...
control system Q4) Figure (a) and Figure (b) below show a system with a unit-step input,...
 control system
Q4) Figure (a) and Figure (b) below show a system with a unit-step input, and the output time response respectively. From the response curve, determine the values of K and T shown in Figure (a)
control system
Q4) Figure (a) and Figure (b) below show a system with a unit-step input, and the output time response respectively. From the response curve, determine the values of K and T shown in Figure (a)
6, Fig. 4 shows three systems. System 1 is a positional servo system. System Π is a positional servo system with PD con...
 6, Fig. 4 shows three systems. System 1 is a positional servo system. System Π is a positional servo system with PD control action. System III is a positional servo system with velocity feedback. Compare the unit-step, unit-impulse, and unit-ramp responses of the three systems by using MATLAB. Which system is best with respect to the speed of response and maximum overshoot in the step response? R(s) C(s) #5s + 1) System I R(s) CI(s S1 +0.8)6-D) System II R(s)...
6, Fig. 4 shows three systems. System 1 is a positional servo system. System Π is a positional servo system with PD control action. System III is a positional servo system with velocity feedback. Compare the unit-step, unit-impulse, and unit-ramp responses of the three systems by using MATLAB. Which system is best with respect to the speed of response and maximum overshoot in the step response? R(s) C(s) #5s + 1) System I R(s) CI(s S1 +0.8)6-D) System II R(s)...
Automatic Control In unity feedback system with Gs) (s-IXs-2) With out controller, is this system stable, and why? For Gc K (proportional control) sketch the root locus. Find the range of K to mak...
 Automatic Control
In unity feedback system with Gs) (s-IXs-2) With out controller, is this system stable, and why? For Gc K (proportional control) sketch the root locus. Find the range of K to make the system stable. Determine the range of K, so that the system has no overshoot Determine the range of K for steady state error to unit step input less than 20% a) b) c) d) e)
In unity feedback system with Gs) (s-IXs-2) With out controller,...
Automatic Control
In unity feedback system with Gs) (s-IXs-2) With out controller, is this system stable, and why? For Gc K (proportional control) sketch the root locus. Find the range of K to make the system stable. Determine the range of K, so that the system has no overshoot Determine the range of K for steady state error to unit step input less than 20% a) b) c) d) e)
In unity feedback system with Gs) (s-IXs-2) With out controller,...
 For the system shown in Fig Q2. Determine the output c(t) when r(t) is: 2. (10 marks) (15 marks) i. A step input of magnitude A ii. A unit ramp input. In each case sketch the expected output response c(t) based on the input r(t). C(s) Fig Q2
For the system shown in Fig Q2. Determine the output c(t) when r(t) is: 2. (10 marks) (15 marks) i. A step input of magnitude A ii. A unit ramp input. In each case sketch the expected output response c(t) based on the input r(t). C(s) Fig Q2
 CP5.4 Consider the control system shown in Figure CP5.4 (a) Show analytically that the expected percent over- shoot of the closed-loop system response to a unit b) Develop an m-file to plot the unit step response cent overshoot from the plot. Compare the result step input is about 50%. of the closed-loop system and estimate the per with part (a) Controller Process 21 42 FIGURE CP5.4 A negative feedback control system
CP5.4 Consider the control system shown in Figure CP5.4...
CP5.4 Consider the control system shown in Figure CP5.4 (a) Show analytically that the expected percent over- shoot of the closed-loop system response to a unit b) Develop an m-file to plot the unit step response cent overshoot from the plot. Compare the result step input is about 50%. of the closed-loop system and estimate the per with part (a) Controller Process 21 42 FIGURE CP5.4 A negative feedback control system
CP5.4 Consider the control system shown in Figure CP5.4...
 Compensator Plant 100 R(s) sta Y(s) For the unity feedback system shown in Fig. 3.55, specify the gain and pole location of the compensator so that the overall closed-loop response to a unit- step input has an overshoot of no more than 30%, and a 2% settling time of no more than 0.2 sec. Verify your design using Matlab. 3.27
Compensator Plant 100 R(s) sta Y(s)
For the unity feedback system shown in Fig. 3.55, specify the gain and pole...
Compensator Plant 100 R(s) sta Y(s) For the unity feedback system shown in Fig. 3.55, specify the gain and pole location of the compensator so that the overall closed-loop response to a unit- step input has an overshoot of no more than 30%, and a 2% settling time of no more than 0.2 sec. Verify your design using Matlab. 3.27
Compensator Plant 100 R(s) sta Y(s)
For the unity feedback system shown in Fig. 3.55, specify the gain and pole...
 Question three The figure below shows a unit step response of a second order system. From the graph of response find: 1- The rise timet, 2- The peak timet, 3- The maximum overshoot Mp 4- The damped natural frequency w 5. The transfer function. Hence find the damping ratio ζ and the natural frequency ah-Find also the transfer function of the system. r 4 02 15 25 35 45 Question Four For the control system shown in the figure below,...
Question three The figure below shows a unit step response of a second order system. From the graph of response find: 1- The rise timet, 2- The peak timet, 3- The maximum overshoot Mp 4- The damped natural frequency w 5. The transfer function. Hence find the damping ratio ζ and the natural frequency ah-Find also the transfer function of the system. r 4 02 15 25 35 45 Question Four For the control system shown in the figure below,...
 For the closed-loop system shown, and given: C(s) 8.41 s+8.10 G(8 2 0.02 3.00 2out G(s) C(s) control plant Part A-Plant 1% settling time Find the 1% settling time of the plant G(s) to a unit step input. 15.38 t,3% - Submit X ncorrect; Try Again - Part B Plant: Overshoot Find the overshoot of the plant G(s)to a unit step input. Give your answer as a percentage Mp: | Value Units Submit Request Answer Part C - Closed-loop system:...
For the closed-loop system shown, and given: C(s) 8.41 s+8.10 G(8 2 0.02 3.00 2out G(s) C(s) control plant Part A-Plant 1% settling time Find the 1% settling time of the plant G(s) to a unit step input. 15.38 t,3% - Submit X ncorrect; Try Again - Part B Plant: Overshoot Find the overshoot of the plant G(s)to a unit step input. Give your answer as a percentage Mp: | Value Units Submit Request Answer Part C - Closed-loop system:...
 1: The plot shown below represents the step response of a second-order LTI system (with input (t) and output y(t)) with zero initial conditions. From the step response: (a) Estimate the peak time tp, and the maximum percentage overshoot %Mp. (b) Estimate the natural frequency wn and the damping ratio c. (c) Derive a differential equation corresponding to this system using the results of parts (a) and (b). Step Response X: 085 Y: 1.261 Amplitude 0 0.5 1 1.5 2...
1: The plot shown below represents the step response of a second-order LTI system (with input (t) and output y(t)) with zero initial conditions. From the step response: (a) Estimate the peak time tp, and the maximum percentage overshoot %Mp. (b) Estimate the natural frequency wn and the damping ratio c. (c) Derive a differential equation corresponding to this system using the results of parts (a) and (b). Step Response X: 085 Y: 1.261 Amplitude 0 0.5 1 1.5 2...
 Problem 4. Consider the control system shown below with plant G(s) that has time con- stants T1 = 2, T2 = 10, and gain k = 0.1. 4 673 +1679+1) (1.) Sketch the pole-zero plot for G(s). Is one of the poles more dominant? Using MATLAB, simulate the step response of the plant itself, along with G1(s) and G2(s) as defined by Gl(s) = and G2(s) = sti + 1 ST2+1 (2.) Design a proportional gain C(s) = K so...
Problem 4. Consider the control system shown below with plant G(s) that has time con- stants T1 = 2, T2 = 10, and gain k = 0.1. 4 673 +1679+1) (1.) Sketch the pole-zero plot for G(s). Is one of the poles more dominant? Using MATLAB, simulate the step response of the plant itself, along with G1(s) and G2(s) as defined by Gl(s) = and G2(s) = sti + 1 ST2+1 (2.) Design a proportional gain C(s) = K so...
 control system
Q4) Figure (a) and Figure (b) below show a system with a unit-step input, and the output time response respectively. From the response curve, determine the values of K and T shown in Figure (a)
control system
Q4) Figure (a) and Figure (b) below show a system with a unit-step input, and the output time response respectively. From the response curve, determine the values of K and T shown in Figure (a)
 6, Fig. 4 shows three systems. System 1 is a positional servo system. System Π is a positional servo system with PD control action. System III is a positional servo system with velocity feedback. Compare the unit-step, unit-impulse, and unit-ramp responses of the three systems by using MATLAB. Which system is best with respect to the speed of response and maximum overshoot in the step response? R(s) C(s) #5s + 1) System I R(s) CI(s S1 +0.8)6-D) System II R(s)...
6, Fig. 4 shows three systems. System 1 is a positional servo system. System Π is a positional servo system with PD control action. System III is a positional servo system with velocity feedback. Compare the unit-step, unit-impulse, and unit-ramp responses of the three systems by using MATLAB. Which system is best with respect to the speed of response and maximum overshoot in the step response? R(s) C(s) #5s + 1) System I R(s) CI(s S1 +0.8)6-D) System II R(s)...
 Automatic Control
In unity feedback system with Gs) (s-IXs-2) With out controller, is this system stable, and why? For Gc K (proportional control) sketch the root locus. Find the range of K to make the system stable. Determine the range of K, so that the system has no overshoot Determine the range of K for steady state error to unit step input less than 20% a) b) c) d) e)
In unity feedback system with Gs) (s-IXs-2) With out controller,...
Automatic Control
In unity feedback system with Gs) (s-IXs-2) With out controller, is this system stable, and why? For Gc K (proportional control) sketch the root locus. Find the range of K to make the system stable. Determine the range of K, so that the system has no overshoot Determine the range of K for steady state error to unit step input less than 20% a) b) c) d) e)
In unity feedback system with Gs) (s-IXs-2) With out controller,...
Most questions answered within 3 hours.
-
A local AM radio station broadcasts at an energy of
4.39×10-31 kJ/photon.
Calculate the frequency at...
asked 21 minutes ago -
Smithson Cutting is opening a new line of scissors for
supermarket distribution. It estimates its fixed...
asked 26 minutes ago -
A student working in a genetics lab was given the task of
studying a new Drosophila...
asked 27 minutes ago -
Object A is moving due east, while object B is moving due north.
They collide and...
asked 29 minutes ago -
Use the de Broglie relationship (l = h/mu where u is speed) to
determine the wavelengths...
asked 45 minutes ago -
An elliptical hair that is 80µ by 120µ in minor and
major diameters that is 10...
asked 45 minutes ago -
I need the SWOT analysis the Tenets of Warren Buffet for the
company "Goldman Sachs".
asked 46 minutes ago -
What is the state of relations between the Soviet Union and the
West between 1965 and...
asked 51 minutes ago -
regarding business managment-
1. define social identity theory / clearly state the
theory.
2. briefly mention...
asked 55 minutes ago -
Develop the pseudocode and the flowchart for a program that
finds the sum of 5 numbers.
asked 59 minutes ago -
Hi, I hope I can get some help with the following exercise in
C++( CPP):
1.Write...
asked 59 minutes ago -
Mul-Choice Psy
1. Kevin is a good student. He studies hard because when he does
he...
asked 1 hour ago