
Homework Answers
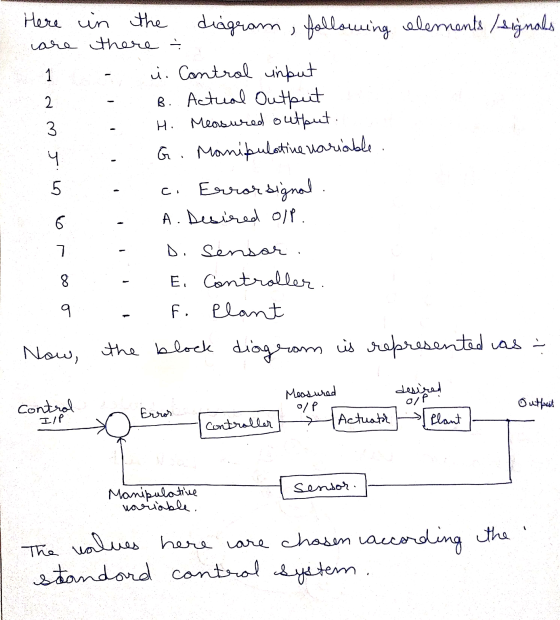
The question is solved using concepts of control theory as shown:
Add Answer to:
Question 1 For the following closed-loop control system, identify the element/signal for each number: 1 5...
Problem 1: Consider the control systems below and answer the questions listed: I. Manually Controlled Tank Level S...
 Problem 1: Consider the control systems below and answer the questions listed: I. Manually Controlled Tank Level System A. Identify the following parameters: 1. Setpoint or reference point: 2. Controlled variable, c Manipulated variable, u Measured representation of the controlled variable, b 3. 4. 5. Error, e 6. Input signal to the control element, p Identify the following elements in the control B. system 1. Error detector 2. Controller 3. Control element 4. Process S. Measurement Element C. Draw a...
Problem 1: Consider the control systems below and answer the questions listed: I. Manually Controlled Tank Level System A. Identify the following parameters: 1. Setpoint or reference point: 2. Controlled variable, c Manipulated variable, u Measured representation of the controlled variable, b 3. 4. 5. Error, e 6. Input signal to the control element, p Identify the following elements in the control B. system 1. Error detector 2. Controller 3. Control element 4. Process S. Measurement Element C. Draw a...
Scenario: A general heating system control loop is shown in Figure 5. The following discussions can...
 Scenario: A general heating system control loop is shown in Figure 5. The following discussions can use the scenario in Figure 5 asya background profile. Error signal - Room Comparison low voltage Valve motor Desired Device Heating value →+ Controller > Actuator Process (set point) Temperature Sensor Sensor Feedback path HVAC HEATING SYSTEM CONTROL LOOP DIAGRAM Figure 5 Task 5.1 (5.1) Explain the importance of a control system in a heating system. What do you expect the general response of...
Scenario: A general heating system control loop is shown in Figure 5. The following discussions can use the scenario in Figure 5 asya background profile. Error signal - Room Comparison low voltage Valve motor Desired Device Heating value →+ Controller > Actuator Process (set point) Temperature Sensor Sensor Feedback path HVAC HEATING SYSTEM CONTROL LOOP DIAGRAM Figure 5 Task 5.1 (5.1) Explain the importance of a control system in a heating system. What do you expect the general response of...
Report task. A standard closed-loop control system is shown in Figure 6. Classify the different components and signals of the electronic compass system in the control engineering terms used in Fi...
 Report task. A standard closed-loop control system is shown in Figure 6. Classify the different components and signals of the electronic compass system in the control engineering terms used in Figure 6, i.e. which components represent the controller, which the plant, what is the output signal, what the actuation signal. Reference Control Actuation Output error Controller signal Pant signal Y (s) value R(s) + U(s) E(s) K (s) G(s) Measured output signal Y (s) H(s) Measurement Figure 6: Basic control...
Report task. A standard closed-loop control system is shown in Figure 6. Classify the different components and signals of the electronic compass system in the control engineering terms used in Figure 6, i.e. which components represent the controller, which the plant, what is the output signal, what the actuation signal. Reference Control Actuation Output error Controller signal Pant signal Y (s) value R(s) + U(s) E(s) K (s) G(s) Measured output signal Y (s) H(s) Measurement Figure 6: Basic control...
1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with...
 1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with feedback where the control law is a form of a PID controller. Design using the Root Locus Method such that the: a. percent overshoot is less than 10% for a unit step b. settling time is less than 4 seconds, c. steady-state absolute error (not percent error) due to a unit ramp input (r=t) is less than 1. d. Note: The actuator u(t) saturates...
1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with feedback where the control law is a form of a PID controller. Design using the Root Locus Method such that the: a. percent overshoot is less than 10% for a unit step b. settling time is less than 4 seconds, c. steady-state absolute error (not percent error) due to a unit ramp input (r=t) is less than 1. d. Note: The actuator u(t) saturates...
Problem 3 (25%): The closed-loop system has the block diagram shown below. Controlle Process Sensor s + l (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of...
 Problem 3 (25%): The closed-loop system has the block diagram shown below. Controlle Process Sensor s + l (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop...
Problem 3 (25%): The closed-loop system has the block diagram shown below. Controlle Process Sensor s + l (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop...
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the control...
 Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
5. Referencing the following diagram, sketch a block diagram of a closed-loop, computer-controlled system, which includes transducer, transmitter, ADC / DAC, controller, actuator, communication...
 5. Referencing the following diagram, sketch a block diagram of a closed-loop, computer-controlled system, which includes transducer, transmitter, ADC / DAC, controller, actuator, communication 14.5 Marks final control element.
5. Referencing the following diagram, sketch a block diagram of a closed-loop, computer-controlled system, which includes transducer, transmitter, ADC / DAC, controller, actuator, communication 14.5 Marks final control element.
5. Referencing the following diagram, sketch a block diagram of a closed-loop, computer-controlled system, which includes transducer, transmitter, ADC / DAC, controller, actuator, communication 14.5 Marks final control element.
5. Referencing the following diagram, sketch a block diagram of a closed-loop, computer-controlled system, which includes transducer, transmitter, ADC / DAC, controller, actuator, communication 14.5 Marks final control element.
yUCni ias the block diagram shown below. Controller Process Sensor (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stabl...
 yUCni ias the block diagram shown below. Controller Process Sensor (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop syste as a function of the design parameter...
yUCni ias the block diagram shown below. Controller Process Sensor (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop syste as a function of the design parameter...
Question 1 (TCO 1) An open-loop control system has all the following except? actuator controller sensor...
Question 1 (TCO 1) An open-loop control system has all the following except? actuator controller sensor process Question 2 (TCO 1) The controlled variable in a closed-loop system is the direction of a robot arm. Initially it is at 50o; then it is commanded to go to 15o. When the error is 10ofor the first time, what is direction of the robot arm? 15o 25o 10o 35o Question 3 (TCO 1) Which of the following is a closed-loop system? Turning...
PLEASE solve it with MATLAB code A unity feedback closed loop control system is displayed in...
 PLEASE solve it with MATLAB code
A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the Isim function of MATLAB, calculate and obtain the graph of the response for 6, (t)-at. Here a : 0.5%, Find the height error after 10 seconds, G) -2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence of Pl controller, and juxtapose the steady state error...
PLEASE solve it with MATLAB code
A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the Isim function of MATLAB, calculate and obtain the graph of the response for 6, (t)-at. Here a : 0.5%, Find the height error after 10 seconds, G) -2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence of Pl controller, and juxtapose the steady state error...
 Problem 1: Consider the control systems below and answer the questions listed: I. Manually Controlled Tank Level System A. Identify the following parameters: 1. Setpoint or reference point: 2. Controlled variable, c Manipulated variable, u Measured representation of the controlled variable, b 3. 4. 5. Error, e 6. Input signal to the control element, p Identify the following elements in the control B. system 1. Error detector 2. Controller 3. Control element 4. Process S. Measurement Element C. Draw a...
Problem 1: Consider the control systems below and answer the questions listed: I. Manually Controlled Tank Level System A. Identify the following parameters: 1. Setpoint or reference point: 2. Controlled variable, c Manipulated variable, u Measured representation of the controlled variable, b 3. 4. 5. Error, e 6. Input signal to the control element, p Identify the following elements in the control B. system 1. Error detector 2. Controller 3. Control element 4. Process S. Measurement Element C. Draw a...
 Scenario: A general heating system control loop is shown in Figure 5. The following discussions can use the scenario in Figure 5 asya background profile. Error signal - Room Comparison low voltage Valve motor Desired Device Heating value →+ Controller > Actuator Process (set point) Temperature Sensor Sensor Feedback path HVAC HEATING SYSTEM CONTROL LOOP DIAGRAM Figure 5 Task 5.1 (5.1) Explain the importance of a control system in a heating system. What do you expect the general response of...
Scenario: A general heating system control loop is shown in Figure 5. The following discussions can use the scenario in Figure 5 asya background profile. Error signal - Room Comparison low voltage Valve motor Desired Device Heating value →+ Controller > Actuator Process (set point) Temperature Sensor Sensor Feedback path HVAC HEATING SYSTEM CONTROL LOOP DIAGRAM Figure 5 Task 5.1 (5.1) Explain the importance of a control system in a heating system. What do you expect the general response of...
 Report task. A standard closed-loop control system is shown in Figure 6. Classify the different components and signals of the electronic compass system in the control engineering terms used in Figure 6, i.e. which components represent the controller, which the plant, what is the output signal, what the actuation signal. Reference Control Actuation Output error Controller signal Pant signal Y (s) value R(s) + U(s) E(s) K (s) G(s) Measured output signal Y (s) H(s) Measurement Figure 6: Basic control...
Report task. A standard closed-loop control system is shown in Figure 6. Classify the different components and signals of the electronic compass system in the control engineering terms used in Figure 6, i.e. which components represent the controller, which the plant, what is the output signal, what the actuation signal. Reference Control Actuation Output error Controller signal Pant signal Y (s) value R(s) + U(s) E(s) K (s) G(s) Measured output signal Y (s) H(s) Measurement Figure 6: Basic control...
 1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with feedback where the control law is a form of a PID controller. Design using the Root Locus Method such that the: a. percent overshoot is less than 10% for a unit step b. settling time is less than 4 seconds, c. steady-state absolute error (not percent error) due to a unit ramp input (r=t) is less than 1. d. Note: The actuator u(t) saturates...
1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with feedback where the control law is a form of a PID controller. Design using the Root Locus Method such that the: a. percent overshoot is less than 10% for a unit step b. settling time is less than 4 seconds, c. steady-state absolute error (not percent error) due to a unit ramp input (r=t) is less than 1. d. Note: The actuator u(t) saturates...
 Problem 3 (25%): The closed-loop system has the block diagram shown below. Controlle Process Sensor s + l (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop...
Problem 3 (25%): The closed-loop system has the block diagram shown below. Controlle Process Sensor s + l (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop...
 Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
Please solve as a MATLAB code.
A unity feedback closed loop control system is displayed in Figure 4. (a) Assume that the controller is given by G (s) 2. Based on the lsim function of MATLAB, calculate and obtain the graph of the response for (t) at. Here a 0.5°/s. Find the height error after 10 seconds, (b) In order to reduce the steady-state error, substitute G (s) with the following controller This is a Proportional-Integral (PI) controller. Repeat part...
 5. Referencing the following diagram, sketch a block diagram of a closed-loop, computer-controlled system, which includes transducer, transmitter, ADC / DAC, controller, actuator, communication 14.5 Marks final control element.
5. Referencing the following diagram, sketch a block diagram of a closed-loop, computer-controlled system, which includes transducer, transmitter, ADC / DAC, controller, actuator, communication 14.5 Marks final control element.
5. Referencing the following diagram, sketch a block diagram of a closed-loop, computer-controlled system, which includes transducer, transmitter, ADC / DAC, controller, actuator, communication 14.5 Marks final control element.
5. Referencing the following diagram, sketch a block diagram of a closed-loop, computer-controlled system, which includes transducer, transmitter, ADC / DAC, controller, actuator, communication 14.5 Marks final control element.
 yUCni ias the block diagram shown below. Controller Process Sensor (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop syste as a function of the design parameter...
yUCni ias the block diagram shown below. Controller Process Sensor (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop syste as a function of the design parameter...
 PLEASE solve it with MATLAB code
A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the Isim function of MATLAB, calculate and obtain the graph of the response for 6, (t)-at. Here a : 0.5%, Find the height error after 10 seconds, G) -2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence of Pl controller, and juxtapose the steady state error...
PLEASE solve it with MATLAB code
A unity feedback closed loop control system is displayed in Figure 4 (a) Assume that the controller is given by G (s)-2. Based on the Isim function of MATLAB, calculate and obtain the graph of the response for 6, (t)-at. Here a : 0.5%, Find the height error after 10 seconds, G) -2 This is a Proportional-Integral (PI) controller. Repeat part (a) in the presence of Pl controller, and juxtapose the steady state error...
Most questions answered within 3 hours.
-
9. A company has a beginning inventory of 4,000 units. The
company estimates it will sell...
asked 11 minutes ago -
A patient goes to the doctor's office with symptoms of a urinary
tract infection and provides...
asked 13 minutes ago -
When responding to the essay questions, be sure to cite any
material you obtained from a...
asked 13 minutes ago -
The energy of an electron in a 2.25-eV-deep potential well is
1.50 eV.At what distance into...
asked 15 minutes ago -
Q1:Which three evolutionary innovations are present in land
plants (but not all land plants) that allowed...
asked 17 minutes ago -
Lymphosarcoma is
extremely rare. Risk factors for the disease are largely unknown.
What kind of study...
asked 20 minutes ago -
The solubility of benzoic acid in water is:
0.29g/100mL at 20°C
6.8g/100mL at 100°C
a) What...
asked 21 minutes ago -
Which food law was passed in 1996 and changed how pesticide
residues on food were regulated...
asked 39 minutes ago -
companies either hire outside programmers to
write_____ software or use their own internal developers.
asked 38 minutes ago -
A magnetic dipole m(t) = m_0*cos(ωt) can be
described as current density j(r,t) = −cm(t) ×...
asked 38 minutes ago -
Probabilities and Counting. Yahtzee is a game that involves six
fair dice. When rolling all six...
asked 40 minutes ago -
What percent of revenue does net income represent for each
year?
Total Revenue
2017 = 60,319,000...
asked 1 hour ago