![1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with feedback where the control la](http://img.homeworklib.com/questions/77638930-9b34-11ea-8078-dd87d680c5b2.png?x-oss-process=image/resize,w_560)
![1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with feedback where the control la](http://img.homeworklib.com/questions/77f3a2d0-9b34-11ea-934b-c10a5695e8ca.png?x-oss-process=image/resize,w_560)
Homework Answers

s=tf('s');
%% plant model
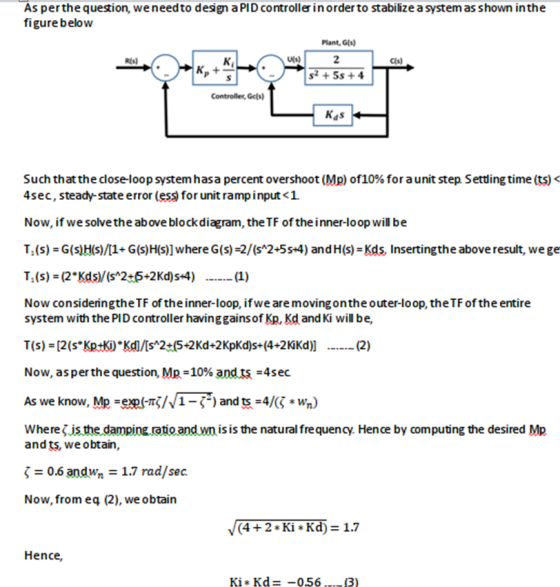
G = 2/(s^2+5*s+4);
%% PID parameter
Kp = 2.57;
Ki = 1;
Kd = -0.56;
C = pid(Kp,Ki,Kd);
%% Close loop system
G_CL = feedback(G*C,1);
%% compute root-locus
rlocus(G_CL)
%% compute step response
t=0:0.1:10;
step(G_CL,t)
%% compute ramp response
ramp=0.2*t; % ramp
input signal
[y,t]=lsim(G_CL,ramp,t); % compute ramp response
plot(t,y)
The root-locus plot of the above system is shown below.

The response for the step input and ramp input are shown below


Add Answer to:
1. [25%] Consider the closed-loop system shown where it is desired to stabilize the system with...
Problem 3 (25%): The closed-loop system has the block diagram shown below. Controlle Process Sensor s + l (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of...
 Problem 3 (25%): The closed-loop system has the block diagram shown below. Controlle Process Sensor s + l (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop...
Problem 3 (25%): The closed-loop system has the block diagram shown below. Controlle Process Sensor s + l (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root lo...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
yUCni ias the block diagram shown below. Controller Process Sensor (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stabl...
 yUCni ias the block diagram shown below. Controller Process Sensor (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop syste as a function of the design parameter...
yUCni ias the block diagram shown below. Controller Process Sensor (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop syste as a function of the design parameter...
Design Problems: (1) A robotic system is described by the transfer function P(s)=- 100 s(s +9.7)(s...
 Design Problems: (1) A robotic system is described by the transfer function P(s)=- 100 s(s +9.7)(s + 51.2) Use the root locus method to design a lead controller that achieves a closed-loop step response with P.0.5 2.5 %, and a settling time T, < 0.25s (using the 2% criterion). Also, the steady-state error to a unit ramp should be ess < 0.15. (2) This system is open-loop unstable: P(S) = 500 (5 - 1)(s + 10) Using the root locus...
Design Problems: (1) A robotic system is described by the transfer function P(s)=- 100 s(s +9.7)(s + 51.2) Use the root locus method to design a lead controller that achieves a closed-loop step response with P.0.5 2.5 %, and a settling time T, < 0.25s (using the 2% criterion). Also, the steady-state error to a unit ramp should be ess < 0.15. (2) This system is open-loop unstable: P(S) = 500 (5 - 1)(s + 10) Using the root locus...
Recall the disc drive problem from Tutorials, where we demonstrated that the system can be written as e(s)+ 1000 Ge...
 Recall the disc drive problem from Tutorials, where we demonstrated that the system can be written as e(s)+ 1000 Ge(s) s(s2 110s 1250) Figure 2: Disc Drive System Block Diagram We will now try to design a compensator with the requirements that i. Overshoot 1096 ii. Ts S 100ms ii. eramp() s 0.001 Do the following (you may use MATLAB at your leisure, but be sure to explain your logic for your design choices) a) Use MATLAB to draw the...
Recall the disc drive problem from Tutorials, where we demonstrated that the system can be written as e(s)+ 1000 Ge(s) s(s2 110s 1250) Figure 2: Disc Drive System Block Diagram We will now try to design a compensator with the requirements that i. Overshoot 1096 ii. Ts S 100ms ii. eramp() s 0.001 Do the following (you may use MATLAB at your leisure, but be sure to explain your logic for your design choices) a) Use MATLAB to draw the...
4. Referring to the closed-loop system shown as below, design a lead compensator Ge(s) such that...
 4. Referring to the closed-loop system shown as below, design a lead compensator Ge(s) such that the phase-margin is 45o, gain margin is not less than 8dB, and the static velocity error constant Ky is 4.0 sec1. Plot unit-step and unit-ramp response curves of the compensated system with MATLAB.
4. Referring to the closed-loop system shown as below, design a lead compensator Ge(s) such that the phase-margin is 45o, gain margin is not less than 8dB, and the static velocity error constant Ky is 4.0 sec1. Plot unit-step and unit-ramp response curves of the compensated system with MATLAB.
i am needing help with a b c o chris question thanks 1000 O(s) Gc(s) s(s2 110s 1250) Figure 2: Disc Drive System Block D...
 i am needing help with a b c o chris question thanks
1000 O(s) Gc(s) s(s2 110s 1250) Figure 2: Disc Drive System Block Diagram We will now try to design a compensator with the requirements that Overshoot 10% ii. Ts S 100ms II. eramp(oo) s 0.001 Do the following (you may use MATLAB at your leisure, but be sure to explain your logic for your design choices) a) Use MATLAB to draw the root locus when Gc K. Augment...
i am needing help with a b c o chris question thanks
1000 O(s) Gc(s) s(s2 110s 1250) Figure 2: Disc Drive System Block Diagram We will now try to design a compensator with the requirements that Overshoot 10% ii. Ts S 100ms II. eramp(oo) s 0.001 Do the following (you may use MATLAB at your leisure, but be sure to explain your logic for your design choices) a) Use MATLAB to draw the root locus when Gc K. Augment...
Problem 1: (20 points) Assume that a standard unity feedback system has the open- loop plant...
 Problem 1: (20 points) Assume that a standard unity feedback system has the open- loop plant transfer function: G(S) s(s+3)(s +6) Use Root Locus Methods to design an analog compensator to meet the following specifications: • The step response settling time is less than 5 seconds. • The step response overshoot is less than 17%. • The steady-state error to a unit-ramp input is less than 10%.
Problem 1: (20 points) Assume that a standard unity feedback system has the open- loop plant transfer function: G(S) s(s+3)(s +6) Use Root Locus Methods to design an analog compensator to meet the following specifications: • The step response settling time is less than 5 seconds. • The step response overshoot is less than 17%. • The steady-state error to a unit-ramp input is less than 10%.
muibliam 5(20%). The closed-loop system is given below. Controller (a) (S%) Find the system transfer function and discuss the range of Ko to make the eystom stuibie assuming K (t)(S%) Find the...
 muibliam 5(20%). The closed-loop system is given below. Controller (a) (S%) Find the system transfer function and discuss the range of Ko to make the eystom stuibie assuming K (t)(S%) Find the percentage of overshoot and stendy state error to the unit ramp input as a function of your design parameter Ke assuming K4 ( d) 5%) Find hed sagn parameters Ko and Kr such that the damping ratio of the closed- lonp system is O15 and the steady state...
muibliam 5(20%). The closed-loop system is given below. Controller (a) (S%) Find the system transfer function and discuss the range of Ko to make the eystom stuibie assuming K (t)(S%) Find the percentage of overshoot and stendy state error to the unit ramp input as a function of your design parameter Ke assuming K4 ( d) 5%) Find hed sagn parameters Ko and Kr such that the damping ratio of the closed- lonp system is O15 and the steady state...
SOLVE USING MATLAB A servomechanism position control has the plant transfer function 10 s(s +1) (s 10) You are to desig...
 SOLVE USING MATLAB
A servomechanism position control has the plant transfer function 10 s(s +1) (s 10) You are to design a series compensation transfer function D(s) in the unity feedback configuration to meet the following closed-loop specifications: . The response to a reference step input is to have no more than 16% overshoot. . The response to a reference step input is to have a rise time of no more than 0.4 sec. The steady-state error to a unit...
SOLVE USING MATLAB
A servomechanism position control has the plant transfer function 10 s(s +1) (s 10) You are to design a series compensation transfer function D(s) in the unity feedback configuration to meet the following closed-loop specifications: . The response to a reference step input is to have no more than 16% overshoot. . The response to a reference step input is to have a rise time of no more than 0.4 sec. The steady-state error to a unit...
 Problem 3 (25%): The closed-loop system has the block diagram shown below. Controlle Process Sensor s + l (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop...
Problem 3 (25%): The closed-loop system has the block diagram shown below. Controlle Process Sensor s + l (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop...
 [7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
[7] Sketch the root locus for the unity feedback system whose open loop transfer function is K G(s) Draw the root locus of the system with the gain Kas a variable. s(s+4) (s2+4s+20) Determine asymptotes, centroid, breakaway point, angle of departure, and the gain at which root locus crosses ja-axis. A control system with type-0 process and a PID controller is shown below. Design the [8 parameters of the PID controller so that the following specifications are satisfied. =100 a)...
 yUCni ias the block diagram shown below. Controller Process Sensor (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop syste as a function of the design parameter...
yUCni ias the block diagram shown below. Controller Process Sensor (a) (5%) Sketch the root locus of the closed-loop system. (b) (5%) Determine the range of K that the closed-loop system is stable. (c) (5%) Find the percentage of overshoot and the steady state error due to a unit step input of the open loop system process. (d) (5%) Find the steady-state error due to a unit step input of the closed-loop syste as a function of the design parameter...
 Design Problems: (1) A robotic system is described by the transfer function P(s)=- 100 s(s +9.7)(s + 51.2) Use the root locus method to design a lead controller that achieves a closed-loop step response with P.0.5 2.5 %, and a settling time T, < 0.25s (using the 2% criterion). Also, the steady-state error to a unit ramp should be ess < 0.15. (2) This system is open-loop unstable: P(S) = 500 (5 - 1)(s + 10) Using the root locus...
Design Problems: (1) A robotic system is described by the transfer function P(s)=- 100 s(s +9.7)(s + 51.2) Use the root locus method to design a lead controller that achieves a closed-loop step response with P.0.5 2.5 %, and a settling time T, < 0.25s (using the 2% criterion). Also, the steady-state error to a unit ramp should be ess < 0.15. (2) This system is open-loop unstable: P(S) = 500 (5 - 1)(s + 10) Using the root locus...
 Recall the disc drive problem from Tutorials, where we demonstrated that the system can be written as e(s)+ 1000 Ge(s) s(s2 110s 1250) Figure 2: Disc Drive System Block Diagram We will now try to design a compensator with the requirements that i. Overshoot 1096 ii. Ts S 100ms ii. eramp() s 0.001 Do the following (you may use MATLAB at your leisure, but be sure to explain your logic for your design choices) a) Use MATLAB to draw the...
Recall the disc drive problem from Tutorials, where we demonstrated that the system can be written as e(s)+ 1000 Ge(s) s(s2 110s 1250) Figure 2: Disc Drive System Block Diagram We will now try to design a compensator with the requirements that i. Overshoot 1096 ii. Ts S 100ms ii. eramp() s 0.001 Do the following (you may use MATLAB at your leisure, but be sure to explain your logic for your design choices) a) Use MATLAB to draw the...
 4. Referring to the closed-loop system shown as below, design a lead compensator Ge(s) such that the phase-margin is 45o, gain margin is not less than 8dB, and the static velocity error constant Ky is 4.0 sec1. Plot unit-step and unit-ramp response curves of the compensated system with MATLAB.
4. Referring to the closed-loop system shown as below, design a lead compensator Ge(s) such that the phase-margin is 45o, gain margin is not less than 8dB, and the static velocity error constant Ky is 4.0 sec1. Plot unit-step and unit-ramp response curves of the compensated system with MATLAB.
 i am needing help with a b c o chris question thanks
1000 O(s) Gc(s) s(s2 110s 1250) Figure 2: Disc Drive System Block Diagram We will now try to design a compensator with the requirements that Overshoot 10% ii. Ts S 100ms II. eramp(oo) s 0.001 Do the following (you may use MATLAB at your leisure, but be sure to explain your logic for your design choices) a) Use MATLAB to draw the root locus when Gc K. Augment...
i am needing help with a b c o chris question thanks
1000 O(s) Gc(s) s(s2 110s 1250) Figure 2: Disc Drive System Block Diagram We will now try to design a compensator with the requirements that Overshoot 10% ii. Ts S 100ms II. eramp(oo) s 0.001 Do the following (you may use MATLAB at your leisure, but be sure to explain your logic for your design choices) a) Use MATLAB to draw the root locus when Gc K. Augment...
 Problem 1: (20 points) Assume that a standard unity feedback system has the open- loop plant transfer function: G(S) s(s+3)(s +6) Use Root Locus Methods to design an analog compensator to meet the following specifications: • The step response settling time is less than 5 seconds. • The step response overshoot is less than 17%. • The steady-state error to a unit-ramp input is less than 10%.
Problem 1: (20 points) Assume that a standard unity feedback system has the open- loop plant transfer function: G(S) s(s+3)(s +6) Use Root Locus Methods to design an analog compensator to meet the following specifications: • The step response settling time is less than 5 seconds. • The step response overshoot is less than 17%. • The steady-state error to a unit-ramp input is less than 10%.
 muibliam 5(20%). The closed-loop system is given below. Controller (a) (S%) Find the system transfer function and discuss the range of Ko to make the eystom stuibie assuming K (t)(S%) Find the percentage of overshoot and stendy state error to the unit ramp input as a function of your design parameter Ke assuming K4 ( d) 5%) Find hed sagn parameters Ko and Kr such that the damping ratio of the closed- lonp system is O15 and the steady state...
muibliam 5(20%). The closed-loop system is given below. Controller (a) (S%) Find the system transfer function and discuss the range of Ko to make the eystom stuibie assuming K (t)(S%) Find the percentage of overshoot and stendy state error to the unit ramp input as a function of your design parameter Ke assuming K4 ( d) 5%) Find hed sagn parameters Ko and Kr such that the damping ratio of the closed- lonp system is O15 and the steady state...
 SOLVE USING MATLAB
A servomechanism position control has the plant transfer function 10 s(s +1) (s 10) You are to design a series compensation transfer function D(s) in the unity feedback configuration to meet the following closed-loop specifications: . The response to a reference step input is to have no more than 16% overshoot. . The response to a reference step input is to have a rise time of no more than 0.4 sec. The steady-state error to a unit...
SOLVE USING MATLAB
A servomechanism position control has the plant transfer function 10 s(s +1) (s 10) You are to design a series compensation transfer function D(s) in the unity feedback configuration to meet the following closed-loop specifications: . The response to a reference step input is to have no more than 16% overshoot. . The response to a reference step input is to have a rise time of no more than 0.4 sec. The steady-state error to a unit...
Most questions answered within 3 hours.
-
While rotating the tires on your car you notice a rock [mass =
0.1 Kg] stuck...
asked 39 minutes ago -
Using MARS simulator, write MIPS programs according to
the following scenarios: Receive a positive integer number...
asked 2 hours ago -
An object in front of a concave mirror has a real image that is
11.5 cm...
asked 2 hours ago -
Consider the reaction, C3 H8 + O2 --> CO2 + H2O. How many
moles of O2...
asked 4 hours ago -
You and your opponent both roll a fair die. If you both roll the
same number,...
asked 4 hours ago -
In a study of the accuracy of fast food drive-through orders,
Restaurant A had 257 accurate...
asked 4 hours ago -
Identify and describe in detail the four categories of
institutions that could be included in a...
asked 4 hours ago -
In python
class Customer:
def __init__(self, customer_id, last_name, first_name, phone_number, address):
self._customer_id = int(customer_id)
self._last_name =...
asked 4 hours ago -
What is an example of a limitation in implementing a new
ERP system and how it...
asked 4 hours ago -
In a section of 9.7cm of an artery with a radius of 2.6mm there
is a...
asked 4 hours ago -
the two carboxylic acid groups of aspartic acid have different
acidities with pKa values of 2.1...
asked 4 hours ago -
Would CuCO3 aqueous salt combined with calcium chloride
form a solid precipitate? If so, what would...
asked 4 hours ago