
Plant transfer function in the system given above: p
2 100 G h s 10s 100 It is given as.
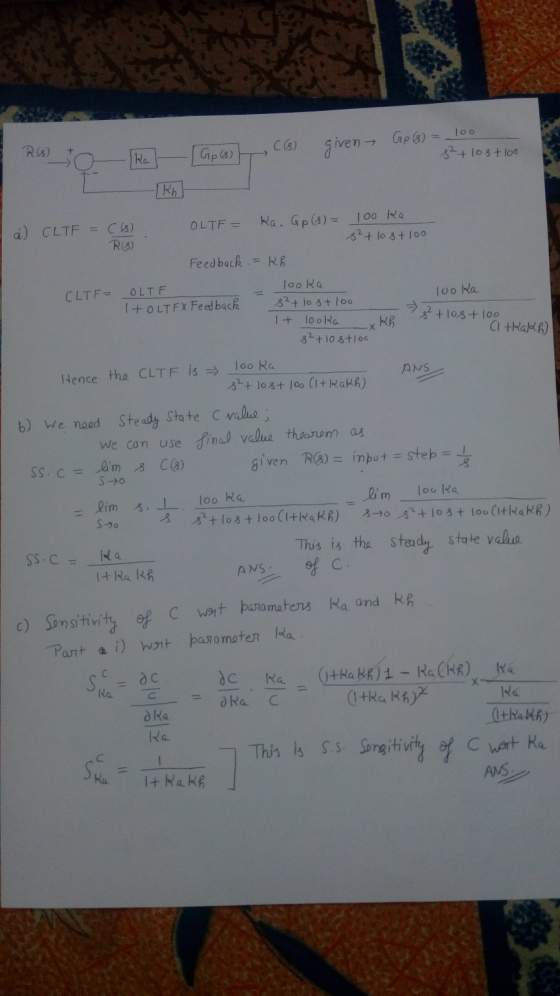
a) Closed loop transfer function C s M s = R s Find the
expression.
b) According to the statement you found in (a), ss c for unit step
entry Please describe.
c) you obtained in (b) ss c the sensitivity of K a and Khar
individually according to parameters write.
D) K a and Khar parameters have uncertainties of 10% and 5%,
respectively. ss c , at rest for less than 1% change K K K a h
According to the testimony K define the range of and this interpret
whether the condition will be met.
Please can you help.

Plant transfer function in the system given
above:Gp(s) =100/s^2+10s+100
a) Closed loop transfer function M s = Cs/Rs Find the
expression.
b) According to the statement you found in (a), ss c for unit step
entry Please describe.
c) you obtained in (b) ss c the sensitivity of K a and Khar
individually according to parameters write.
D)Ka and Kh
parameters have uncertainties of 10% and 5%, respectively.
Css
, at rest
for less than 1% change
K=KaKh
According to the testimony
K
define the range of and this
interpret whether the condition will be met.
Homework Answers
 The whole problem is about basics of
transfer function and it's dependency on forward path and feedback
variables.
The whole problem is about basics of
transfer function and it's dependency on forward path and feedback
variables.
Hope you get it easily,
Stay safe and have a great day .
Add Answer to:
Plant transfer function in the system given above: p
2 100 G h s...
Y(S) Gp(s) Gc(s) R(S) For the given system above, determine the gain K that will give the system desired response below . Settling time of 2 seconds . Peak time of 0.5 seconds . The given plant h...
 Y(S) Gp(s) Gc(s) R(S) For the given system above, determine the gain K that will give the system desired response below . Settling time of 2 seconds . Peak time of 0.5 seconds . The given plant has a transfer function of: Gp - (s +8V( (s +6'(s+4) The controller has a transfer function of: Gc (s+33.7392Vs
Y(S) Gp(s) Gc(s) R(S) For the given system above, determine the gain K that will give the system desired response below . Settling...
Y(S) Gp(s) Gc(s) R(S) For the given system above, determine the gain K that will give the system desired response below . Settling time of 2 seconds . Peak time of 0.5 seconds . The given plant has a transfer function of: Gp - (s +8V( (s +6'(s+4) The controller has a transfer function of: Gc (s+33.7392Vs
Y(S) Gp(s) Gc(s) R(S) For the given system above, determine the gain K that will give the system desired response below . Settling...
For the given system above, determine the gain K that will give the system desired response below: Settling time of 5 seconds Peak time of 0.5 seconds The given plant has a transfer function of: Gp...
 For the given system above, determine the gain K that will give
the system desired response below:
Settling time of 5 seconds
Peak time of 0.5 seconds
The given plant has a transfer function of: Gp = (s + 4)/( (s +
1)*(s + 3) )
The controller has a transfer function of: Gc =
(s+27.75)/s
QUESTION 2 10 points Save Answer Y(S) R(s) Gc(s) Gp(s) For the given system above, determine the gain K that will give the system...
For the given system above, determine the gain K that will give
the system desired response below:
Settling time of 5 seconds
Peak time of 0.5 seconds
The given plant has a transfer function of: Gp = (s + 4)/( (s +
1)*(s + 3) )
The controller has a transfer function of: Gc =
(s+27.75)/s
QUESTION 2 10 points Save Answer Y(S) R(s) Gc(s) Gp(s) For the given system above, determine the gain K that will give the system...
Consider a plant with transfer function 5- Gp(s) = s2 Design a proper compensator Gc(s) and a gain p for the feedback system shown below so that the resulting system has all poles at s=-2, and the ou...
Consider a plant with transfer function 5- Gp(s) = s2 Design a proper compensator Gc(s) and a gain p for the feedback system shown below so that the resulting system has all poles at s=-2, and the output C(s) will track asymptotically any step reference input R(s). Find the resulting overall transfer function T(s) R(s) Consider a plant with transfer function 5- Gp(s) = s2 Design a proper compensator Gc(s) and a gain p for the feedback system shown below...
You are given an unstable plant with a transfer function P(s) = Tote -1 R(S) Y(8)...
 You are given an unstable plant with a transfer function P(s) = Tote -1 R(S) Y(8) 11+ C(8) P(s) You are to design a proportional controller, C(s) = K, such that the closed-loop system is BIBO stable and meets the following performance specifications: (i) Rise time T, < 0.5 seconds (where T, = 28) (ii) Percent overshoot %OS < 50%. Do the following: (a) Sketch the region in the complex plane where you would like the poles of the closed-loop...
You are given an unstable plant with a transfer function P(s) = Tote -1 R(S) Y(8) 11+ C(8) P(s) You are to design a proportional controller, C(s) = K, such that the closed-loop system is BIBO stable and meets the following performance specifications: (i) Rise time T, < 0.5 seconds (where T, = 28) (ii) Percent overshoot %OS < 50%. Do the following: (a) Sketch the region in the complex plane where you would like the poles of the closed-loop...
Please show all work and write neatly so I can understand how to do this on my own. Thank you. The transfer function of the given physical system is 2500 Gp(s)- P21000 The physical system is controll...
 Please show all work and write neatly so I can understand how to
do this on my own. Thank you.
The transfer function of the given physical system is 2500 Gp(s)- P21000 The physical system is controlled with a unity-feedback system shown below, E(s) R(s) + (a) Draw the bode plot of open-loop transfer function when K-1. (b) Use bode plot of open-loop transfer function to determine the type of system (do not use transfer function)
The transfer function of...
Please show all work and write neatly so I can understand how to
do this on my own. Thank you.
The transfer function of the given physical system is 2500 Gp(s)- P21000 The physical system is controlled with a unity-feedback system shown below, E(s) R(s) + (a) Draw the bode plot of open-loop transfer function when K-1. (b) Use bode plot of open-loop transfer function to determine the type of system (do not use transfer function)
The transfer function of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller trans...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
A unity gain negative feedback system has an open-loop transfer function given by 4. s) =...
 A unity gain negative feedback system has an open-loop transfer function given by 4. s) = s(1 + 10s)(1 + 10s)? Draw a Bode diagram for this system and determine the loop gain K required for a phase margin of 20 deg. What is the gain margin? 5. We are given the closed-loop transfer function 10(s + 1) T(s) = 82+98+10 for a "unity feedback" system and asked to find the open-loop transfer function, generate a log-magnitude-phase plot for both...
A unity gain negative feedback system has an open-loop transfer function given by 4. s) = s(1 + 10s)(1 + 10s)? Draw a Bode diagram for this system and determine the loop gain K required for a phase margin of 20 deg. What is the gain margin? 5. We are given the closed-loop transfer function 10(s + 1) T(s) = 82+98+10 for a "unity feedback" system and asked to find the open-loop transfer function, generate a log-magnitude-phase plot for both...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5...
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Required Plant Transfer Function! 사, (H183) 3. Design the proportional (Kp) and derivative (Ka) ...
 I need help with the following:
Required Plant Transfer Function! 사, (H183) 3. Design the proportional (Kp) and derivative (Ka) coefficients for a controller in Propotional- Derivative with Derivative on Output Only (PD-DOO) form. (Fig. 4). T(t) Gp(s) Figure 4: Proportional-Derivative closed loop control with Derivative-on-Output-Only Derive the closed loop transfer function, G2(s). Let the desired specifications of the compensated, closed loop system be wn 12 and-0.6 -In this configuration the known parameters are J, c, wn and Ç. Determine...
I need help with the following:
Required Plant Transfer Function! 사, (H183) 3. Design the proportional (Kp) and derivative (Ka) coefficients for a controller in Propotional- Derivative with Derivative on Output Only (PD-DOO) form. (Fig. 4). T(t) Gp(s) Figure 4: Proportional-Derivative closed loop control with Derivative-on-Output-Only Derive the closed loop transfer function, G2(s). Let the desired specifications of the compensated, closed loop system be wn 12 and-0.6 -In this configuration the known parameters are J, c, wn and Ç. Determine...
Give me the explanation plz 2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) =...
 Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
 Y(S) Gp(s) Gc(s) R(S) For the given system above, determine the gain K that will give the system desired response below . Settling time of 2 seconds . Peak time of 0.5 seconds . The given plant has a transfer function of: Gp - (s +8V( (s +6'(s+4) The controller has a transfer function of: Gc (s+33.7392Vs
Y(S) Gp(s) Gc(s) R(S) For the given system above, determine the gain K that will give the system desired response below . Settling...
Y(S) Gp(s) Gc(s) R(S) For the given system above, determine the gain K that will give the system desired response below . Settling time of 2 seconds . Peak time of 0.5 seconds . The given plant has a transfer function of: Gp - (s +8V( (s +6'(s+4) The controller has a transfer function of: Gc (s+33.7392Vs
Y(S) Gp(s) Gc(s) R(S) For the given system above, determine the gain K that will give the system desired response below . Settling...
 For the given system above, determine the gain K that will give
the system desired response below:
Settling time of 5 seconds
Peak time of 0.5 seconds
The given plant has a transfer function of: Gp = (s + 4)/( (s +
1)*(s + 3) )
The controller has a transfer function of: Gc =
(s+27.75)/s
QUESTION 2 10 points Save Answer Y(S) R(s) Gc(s) Gp(s) For the given system above, determine the gain K that will give the system...
For the given system above, determine the gain K that will give
the system desired response below:
Settling time of 5 seconds
Peak time of 0.5 seconds
The given plant has a transfer function of: Gp = (s + 4)/( (s +
1)*(s + 3) )
The controller has a transfer function of: Gc =
(s+27.75)/s
QUESTION 2 10 points Save Answer Y(S) R(s) Gc(s) Gp(s) For the given system above, determine the gain K that will give the system...
 You are given an unstable plant with a transfer function P(s) = Tote -1 R(S) Y(8) 11+ C(8) P(s) You are to design a proportional controller, C(s) = K, such that the closed-loop system is BIBO stable and meets the following performance specifications: (i) Rise time T, < 0.5 seconds (where T, = 28) (ii) Percent overshoot %OS < 50%. Do the following: (a) Sketch the region in the complex plane where you would like the poles of the closed-loop...
You are given an unstable plant with a transfer function P(s) = Tote -1 R(S) Y(8) 11+ C(8) P(s) You are to design a proportional controller, C(s) = K, such that the closed-loop system is BIBO stable and meets the following performance specifications: (i) Rise time T, < 0.5 seconds (where T, = 28) (ii) Percent overshoot %OS < 50%. Do the following: (a) Sketch the region in the complex plane where you would like the poles of the closed-loop...
 Please show all work and write neatly so I can understand how to
do this on my own. Thank you.
The transfer function of the given physical system is 2500 Gp(s)- P21000 The physical system is controlled with a unity-feedback system shown below, E(s) R(s) + (a) Draw the bode plot of open-loop transfer function when K-1. (b) Use bode plot of open-loop transfer function to determine the type of system (do not use transfer function)
The transfer function of...
Please show all work and write neatly so I can understand how to
do this on my own. Thank you.
The transfer function of the given physical system is 2500 Gp(s)- P21000 The physical system is controlled with a unity-feedback system shown below, E(s) R(s) + (a) Draw the bode plot of open-loop transfer function when K-1. (b) Use bode plot of open-loop transfer function to determine the type of system (do not use transfer function)
The transfer function of...
 Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
Consider a unity-feedback control system with a PI controller Gpr(s) and a plant G(s) in cascade. In particular, the plant transfer function is given as 2. G(s) = s+4, and the PI controller transfer function is of the forrm KI p and Ki are the proportional and integral controller gains, respectively where K Design numerical values for Kp and Ki such that the closed-loop control system has a step- response settling time T, 0.5 seconds with a damping ratio of...
 A unity gain negative feedback system has an open-loop transfer function given by 4. s) = s(1 + 10s)(1 + 10s)? Draw a Bode diagram for this system and determine the loop gain K required for a phase margin of 20 deg. What is the gain margin? 5. We are given the closed-loop transfer function 10(s + 1) T(s) = 82+98+10 for a "unity feedback" system and asked to find the open-loop transfer function, generate a log-magnitude-phase plot for both...
A unity gain negative feedback system has an open-loop transfer function given by 4. s) = s(1 + 10s)(1 + 10s)? Draw a Bode diagram for this system and determine the loop gain K required for a phase margin of 20 deg. What is the gain margin? 5. We are given the closed-loop transfer function 10(s + 1) T(s) = 82+98+10 for a "unity feedback" system and asked to find the open-loop transfer function, generate a log-magnitude-phase plot for both...
 Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
Question 6 The open-loop transfer function G(s) of a control system is given as G(8)- s(s+2)(s +5) A proportional controller is used to control the system as shown in Figure 6 below: Y(s) R(s) + G(s) Figure 6: A control system with a proportional controller a) Assume Hp(s) is a proportional controller with the transfer function H,(s) kp. Determine, using the Routh-Hurwitz Stability Criterion, the value of kp for which the closed-loop system in Figure 6 is marginally stable. (6...
 I need help with the following:
Required Plant Transfer Function! 사, (H183) 3. Design the proportional (Kp) and derivative (Ka) coefficients for a controller in Propotional- Derivative with Derivative on Output Only (PD-DOO) form. (Fig. 4). T(t) Gp(s) Figure 4: Proportional-Derivative closed loop control with Derivative-on-Output-Only Derive the closed loop transfer function, G2(s). Let the desired specifications of the compensated, closed loop system be wn 12 and-0.6 -In this configuration the known parameters are J, c, wn and Ç. Determine...
I need help with the following:
Required Plant Transfer Function! 사, (H183) 3. Design the proportional (Kp) and derivative (Ka) coefficients for a controller in Propotional- Derivative with Derivative on Output Only (PD-DOO) form. (Fig. 4). T(t) Gp(s) Figure 4: Proportional-Derivative closed loop control with Derivative-on-Output-Only Derive the closed loop transfer function, G2(s). Let the desired specifications of the compensated, closed loop system be wn 12 and-0.6 -In this configuration the known parameters are J, c, wn and Ç. Determine...
 Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
Give me the explanation plz
2. a) A digital controller implementation for a feedback system is shown in Figure 2 where the sampling period is T0.1 second. The plant transfer function is s +10 P(s) = and the feedback controller, K, is a simple proportional gain (K>0).v R(z) E(z) S+10 Controller ZOH Plant Figure 2* i)o In order to directly design a digital controller in the z-domain, the plant P(s) 6. needs to be discretised as P(z). Find the ZOH...
Most questions answered within 3 hours.
-
A lottery exists where balls numbered 1 to 17 are placed in an
urn. To win,...
asked 58 minutes ago -
Please explain steps:
An 80 kg swimmer steps off a platform 10 m above the water...
asked 55 minutes ago -
26) Briefly describe, using words or simple diagrams, the
chemiosmotic theory for coupling oxidation to phosphorylation...
asked 2 hours ago -
Suppose that XX is a random variable with mean 16 and standard
deviation 5 . Also...
asked 3 hours ago -
Calculate the number density of argon gas at a temperature of
24C and a pressure of...
asked 6 hours ago -
Alternative
Classification
How to Estimate
Probabilities from Data? ( For continuous Attributes)
And How to generate...
asked 6 hours ago -
An explosion breaks a 20.0-kg object into three parts. The
object is initially moving at a...
asked 7 hours ago -
Calculate the approximate number of residues of Rubisco, which
is involved in carbon fixation in plants,...
asked 8 hours ago -
Other decisions about scientific claims can have a much broader
impact.ENERGYarrow-10x10.png, environment, health, security - all...
asked 9 hours ago -
I need to write a research paper and work cited about this
topic: The United States...
asked 10 hours ago -
Hello! I was wondering if I could have some help?
If the vapor pressure of carvone...
asked 10 hours ago -
An economist wants to estimate the mean per capita income (in
thousands of dollars) for a...
asked 10 hours ago