Question
*If MatLab is used for matrix calculation please include .m file or text from your code in case I still have any doubt. Thank you!!!!

Homework Answers
Answer #1


given Polar Planar manipulator (a) Kinematic diagram Yo az yi Xi 1 x" oi Та, di I oh (b) Homogeneous transformation matrix H = Rot (zo, Oi) Trans (x, di) Trans и H OH H - OHS Trans (xo,d,) il - Trons (Y) 9,) HI = Rot (Z", 01) Translx", A2) H
iha o 1? "J O o с со b ng об 0 a 14 H caso, oli G -sino, o H - sino coso, X 0 OOO 1 5 o- 0 Trams (",) 0 d iH coso, sino, - sinoi coso, 0 ggo 0- oo Coso, -sindi az co.so, tdi sino, coso, asino, ta, coordinates of end effector are given by so acoso, tdi azsino, ta, Y 1
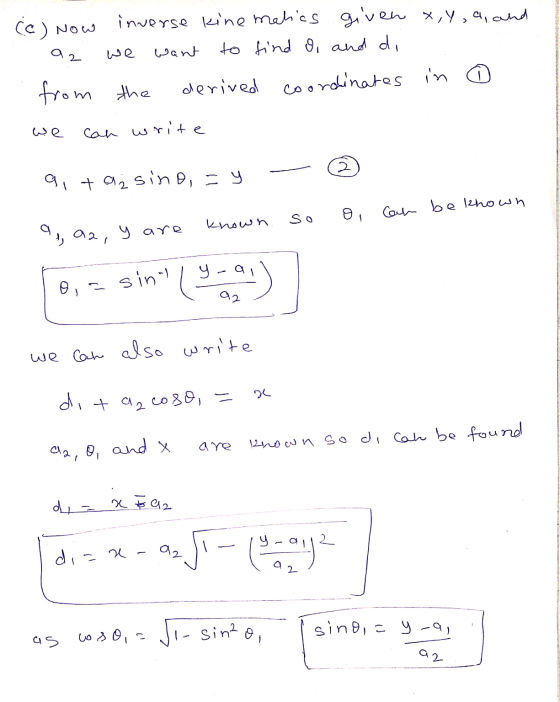
(c) Now inverse kinematics given given x,y, a, and want to find o, and di 2 we from the derived coordinates in can write we 2 a, tazsino, = y o, can be known so known a, az, y are sinn in we can also write a dit acoso, - aa, oi and X are known so di can be found d = x 892 az dia ST-(2-a) ² coso, Si- sinzo sino, = yra, as az
Know the answer?
Add Answer to:
*If MatLab is used for matrix calculation please include .m file
or text from your code...
Not the answer you're looking for?
Ask your own homework help question.
Our experts will answer your question WITHIN MINUTES for Free.
Similar Homework Help Questions
MATLAB EXERCISE4 This exercise focuses on the inverse-pose kinematics solution for the planar 3-DOF 3R robot...
 MATLAB EXERCISE4 This exercise focuses on the inverse-pose kinematics solution for the planar 3-DOF 3R robot (see Figures 3.6 and 3.7; the DH parameters are given in Figure 3.8). The following fixed-length parameters are given: L-4, L-3, and L3 2(m). a) Analytically derive, by hand, the inverse-pose solution for this robot: Given QT calculate all possible multiple solutions for (01 62 63]. (Three methods are pre- sented in the text-choose one of these.) Hint: To simplify the equations, first cal-...
MATLAB EXERCISE4 This exercise focuses on the inverse-pose kinematics solution for the planar 3-DOF 3R robot (see Figures 3.6 and 3.7; the DH parameters are given in Figure 3.8). The following fixed-length parameters are given: L-4, L-3, and L3 2(m). a) Analytically derive, by hand, the inverse-pose solution for this robot: Given QT calculate all possible multiple solutions for (01 62 63]. (Three methods are pre- sented in the text-choose one of these.) Hint: To simplify the equations, first cal-...
 MATLAB EXERCISE4 This exercise focuses on the inverse-pose kinematics solution for the planar 3-DOF 3R robot (see Figures 3.6 and 3.7; the DH parameters are given in Figure 3.8). The following fixed-length parameters are given: L-4, L-3, and L3 2(m). a) Analytically derive, by hand, the inverse-pose solution for this robot: Given QT calculate all possible multiple solutions for (01 62 63]. (Three methods are pre- sented in the text-choose one of these.) Hint: To simplify the equations, first cal-...
MATLAB EXERCISE4 This exercise focuses on the inverse-pose kinematics solution for the planar 3-DOF 3R robot (see Figures 3.6 and 3.7; the DH parameters are given in Figure 3.8). The following fixed-length parameters are given: L-4, L-3, and L3 2(m). a) Analytically derive, by hand, the inverse-pose solution for this robot: Given QT calculate all possible multiple solutions for (01 62 63]. (Three methods are pre- sented in the text-choose one of these.) Hint: To simplify the equations, first cal-...
ADVERTISEMENT
Need Online Homework Help?
Ask
a QuestionGet Answers For Free
Most questions answered within 3 hours.
Most questions answered within 3 hours.
ADVERTISEMENT
ADVERTISEMENT
Active Questions
-
What is a highly unreasonable omission or misrepresentation
involving an extreme departure from the standards of...
asked 6 minutes ago -
What are the three mechanisms that control hormone release and a
example of each.
asked 20 minutes ago -
What would happen to the price level and real GDP if new, large
reserves of petroleum...
asked 22 minutes ago -
2. According to economists, people pollute because
a. They have low self esteem
b. They are...
asked 15 minutes ago -
For this project you will be writing up a simple Clock program
to keep track of...
asked 22 minutes ago -
The December 31, 2018, adjusted trial balance for Fightin' Blue
Hens Corporation is presented below.
...
asked 26 minutes ago -
E21-11 (L02) (Amortization Schedule and Journal Entries for
Lessee) Laura Leasing Company signs an agreement on...
asked 44 minutes ago -
Joe Mataya’s company provides after-sales support for all the
photo-copiers and high-load printers on our campus....
asked 52 minutes ago -
In a statistics class there are 12 students. Five of the
students are seniors and the...
asked 1 hour ago -
can someone please explain for me in any easy way what does
Dipole mean ?
asked 1 hour ago -
Consider the following grammar:
<S> → <A> a <B> b
<A> → <A> b | b...
asked 1 hour ago -
Chapter’s 2 “Dominos Sizzles with Pizza Tracker” Case Study.
Ansewer the following questions:
1) What kinds...
asked 1 hour ago
ADVERTISEMENT