![Problem 2: Output-feedback stabilization Consider the following system 0 -8 3-3 4 [2-92]z y = a) Verify that the system is ob](http://img.homeworklib.com/questions/b0543770-a136-11eb-a086-ebf6e1ef214f.png?x-oss-process=image/resize,w_560)
Homework Answers
Add Answer to:
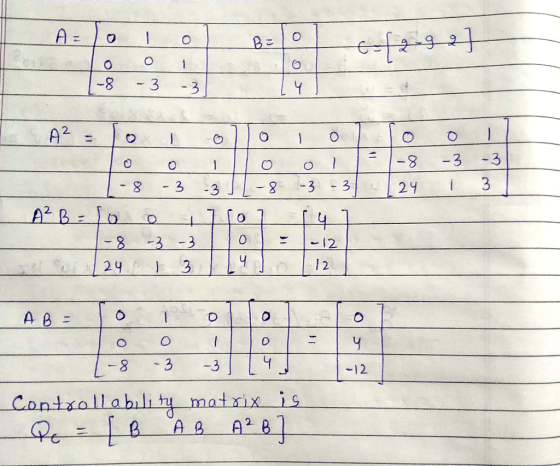
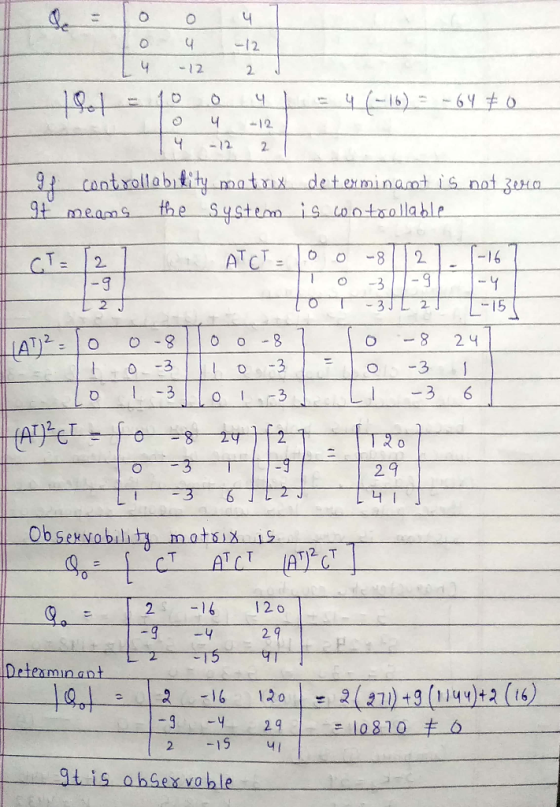
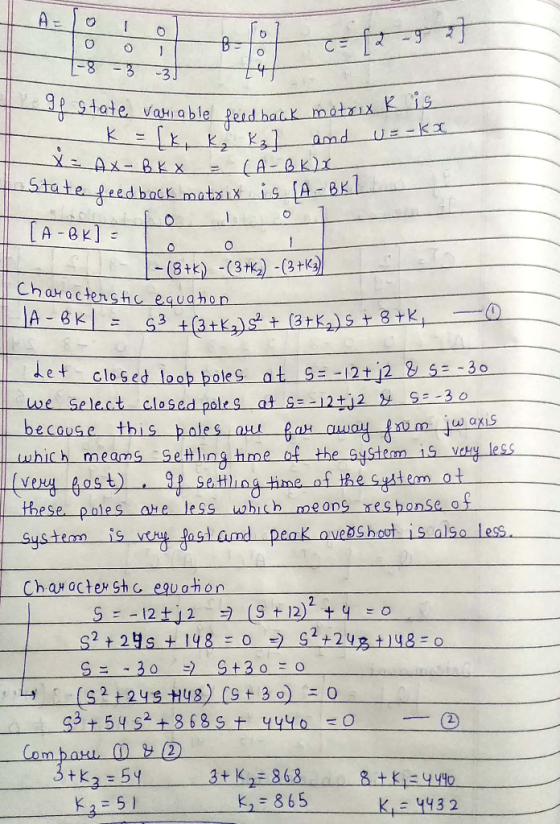
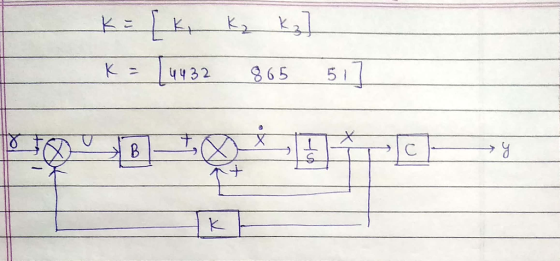
Problem 2: Output-feedback stabilization Consider the following system 0 -8 3-3 4 [2-92]z y = a)...
Consider a unity feedback control architecture where P(s) = 1/s^2 and C(s) = K * ((s + z)/(s + p)...
 Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
Consider the following transfer function of a linear control system 1- Determine the state feedb...
 Consider the following transfer function of a linear control
system
1- Determine the state feedback gain matrix that places the
closed system at s=-32, -3.234 ± j3.3.
2- Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
3-Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control...
Consider the following transfer function of a linear control
system
1- Determine the state feedback gain matrix that places the
closed system at s=-32, -3.234 ± j3.3.
2- Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
3-Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control...
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop pol...
 Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues sati...
 3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a constant reference r. (a) Design the controller using the feedback compensator method. (b) Design the controller using the integral-control method.
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a...
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a constant reference r. (a) Design the controller using the feedback compensator method. (b) Design the controller using the integral-control method.
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a...
Consider the following transfer function of a linear control system Determine the state feedba...
 Consider the following transfer function of a linear control
system
Determine the state feedback gain matrix that places the closed
system at s=-32, -3.234 ± j3.3.
Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control system (a)...
Consider the following transfer function of a linear control
system
Determine the state feedback gain matrix that places the closed
system at s=-32, -3.234 ± j3.3.
Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control system (a)...
3. (20 pts.) Consider the system: where: C-1 0 0 -4 0 7 a) Analyze the...
 3. (20 pts.) Consider the system: where: C-1 0 0 -4 0 7 a) Analyze the stability of the system. b) Design a regulator for this system using the pole-placement with observer approach. Assume that the desired closed-loop poles for the pole placement part are located at: The desired observer poles are: S--7 c) Obtain the transfer function of the observer controller. S--7
3. (20 pts.) Consider the system: where: C-1 0 0 -4 0 7 a) Analyze the stability of the system. b) Design a regulator for this system using the pole-placement with observer approach. Assume that the desired closed-loop poles for the pole placement part are located at: The desired observer poles are: S--7 c) Obtain the transfer function of the observer controller. S--7
- 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a...
 - 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a convenient state space representation of model G(s) . b) Using place design a controller for the system that puts the poles at -1 and-2 +-2 . c) Using place design an observer with poles at-10,-11 and-12 d) Simulate the states with the state estimates overlaid e)Find a state space representation of the closed loop system...
- 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a convenient state space representation of model G(s) . b) Using place design a controller for the system that puts the poles at -1 and-2 +-2 . c) Using place design an observer with poles at-10,-11 and-12 d) Simulate the states with the state estimates overlaid e)Find a state space representation of the closed loop system...
1. Consider a Selective Catalytic Reduction (SCR) control system which will control urea injection upstream of...
 1. Consider a Selective Catalytic Reduction (SCR) control system which will control urea injection upstream of SCR based on NOx sensor feedback measured at the outlet of the SCR. Based on the paper by Upadhyay and Nieuwstadt [1], a single cell model of SCR can be described by the following state space model: * = A x + Bu y = C x Where x = [Cno Cnuz] A = [-0.25 0.08 0.35 -0.1 [ 0 0.03 01 0.05); B...
1. Consider a Selective Catalytic Reduction (SCR) control system which will control urea injection upstream of SCR based on NOx sensor feedback measured at the outlet of the SCR. Based on the paper by Upadhyay and Nieuwstadt [1], a single cell model of SCR can be described by the following state space model: * = A x + Bu y = C x Where x = [Cno Cnuz] A = [-0.25 0.08 0.35 -0.1 [ 0 0.03 01 0.05); B...
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measur...
 control system with observer
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measured output. 1. Find the transfer function of the system. 2. Design a state feedback controller with a full-state observer such that the step response of the closed loop system is second order dominant with an overshoot Mp settling time ts s 5 sec. Represent the observer-based control system in a compact state space form. 10%...
control system with observer
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measured output. 1. Find the transfer function of the system. 2. Design a state feedback controller with a full-state observer such that the step response of the closed loop system is second order dominant with an overshoot Mp settling time ts s 5 sec. Represent the observer-based control system in a compact state space form. 10%...
could you please answer this question QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in...
 could you please answer this question
QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in canonical form. (b) (4 marks) Check the observability of the system. (c) 8 marks) Design a suitable full-order state observer for the system. Explain your choice of the observer's poles. d) (10 marks) Design a PI controller for the system so the output of the...
could you please answer this question
QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in canonical form. (b) (4 marks) Check the observability of the system. (c) 8 marks) Design a suitable full-order state observer for the system. Explain your choice of the observer's poles. d) (10 marks) Design a PI controller for the system so the output of the...
 Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
Consider a unity feedback control architecture where P(s) =
1/s^2 and C(s) = K * ((s + z)/(s + p)) . It is desired to design
the controller to place the dominant closed-loop poles at sd = −2 ±
2j. Fix the pole of the compensator at −20 rad/sec and use root
locus techniques to find values of z and K to place the closed–loop
poles at sd .
Problem 4 (placing a zero) Consider a unity feedback control architecture...
 Consider the following transfer function of a linear control
system
1- Determine the state feedback gain matrix that places the
closed system at s=-32, -3.234 ± j3.3.
2- Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
3-Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control...
Consider the following transfer function of a linear control
system
1- Determine the state feedback gain matrix that places the
closed system at s=-32, -3.234 ± j3.3.
2- Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
3-Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control...
 Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
Problem 3. Consider the system -2 01 Design feedback control u =-Kx such that the closed-loop poles are at s=-2+)2 and s=-2-j2. Assume K= [k1
 3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a constant reference r. (a) Design the controller using the feedback compensator method. (b) Design the controller using the integral-control method.
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a...
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a constant reference r. (a) Design the controller using the feedback compensator method. (b) Design the controller using the integral-control method.
3. Consider the system It is desired to design an output feedback controller such that all closed-loop eigenvalues satisfy R, [A S-3 and the output y is to track a...
 Consider the following transfer function of a linear control
system
Determine the state feedback gain matrix that places the closed
system at s=-32, -3.234 ± j3.3.
Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control system (a)...
Consider the following transfer function of a linear control
system
Determine the state feedback gain matrix that places the closed
system at s=-32, -3.234 ± j3.3.
Design a full order observer which produces a set of desired
closed loop poles at s=-16, -16.15±j16.5
Assume X1 is measurable, design a reduced order observer with
desired closed loop poles at -16.15±j16.5
We were unable to transcribe this image1 Y(s) U(s) (s+1)(s2+0.7s+2) Consider the following transfer function of a linear control system (a)...
 3. (20 pts.) Consider the system: where: C-1 0 0 -4 0 7 a) Analyze the stability of the system. b) Design a regulator for this system using the pole-placement with observer approach. Assume that the desired closed-loop poles for the pole placement part are located at: The desired observer poles are: S--7 c) Obtain the transfer function of the observer controller. S--7
3. (20 pts.) Consider the system: where: C-1 0 0 -4 0 7 a) Analyze the stability of the system. b) Design a regulator for this system using the pole-placement with observer approach. Assume that the desired closed-loop poles for the pole placement part are located at: The desired observer poles are: S--7 c) Obtain the transfer function of the observer controller. S--7
 - 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a convenient state space representation of model G(s) . b) Using place design a controller for the system that puts the poles at -1 and-2 +-2 . c) Using place design an observer with poles at-10,-11 and-12 d) Simulate the states with the state estimates overlaid e)Find a state space representation of the closed loop system...
- 4. Full State Feedback and Observer Design Consider the plant s + 1 G(s)- (s + a(s +8(s +10) where a-1. a) Find a convenient state space representation of model G(s) . b) Using place design a controller for the system that puts the poles at -1 and-2 +-2 . c) Using place design an observer with poles at-10,-11 and-12 d) Simulate the states with the state estimates overlaid e)Find a state space representation of the closed loop system...
 1. Consider a Selective Catalytic Reduction (SCR) control system which will control urea injection upstream of SCR based on NOx sensor feedback measured at the outlet of the SCR. Based on the paper by Upadhyay and Nieuwstadt [1], a single cell model of SCR can be described by the following state space model: * = A x + Bu y = C x Where x = [Cno Cnuz] A = [-0.25 0.08 0.35 -0.1 [ 0 0.03 01 0.05); B...
1. Consider a Selective Catalytic Reduction (SCR) control system which will control urea injection upstream of SCR based on NOx sensor feedback measured at the outlet of the SCR. Based on the paper by Upadhyay and Nieuwstadt [1], a single cell model of SCR can be described by the following state space model: * = A x + Bu y = C x Where x = [Cno Cnuz] A = [-0.25 0.08 0.35 -0.1 [ 0 0.03 01 0.05); B...
 control system with observer
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measured output. 1. Find the transfer function of the system. 2. Design a state feedback controller with a full-state observer such that the step response of the closed loop system is second order dominant with an overshoot Mp settling time ts s 5 sec. Represent the observer-based control system in a compact state space form. 10%...
control system with observer
Consider the following system: -1-2-21 гг 1 0 1 L Where u is the system input and y is the measured output. 1. Find the transfer function of the system. 2. Design a state feedback controller with a full-state observer such that the step response of the closed loop system is second order dominant with an overshoot Mp settling time ts s 5 sec. Represent the observer-based control system in a compact state space form. 10%...
 could you please answer this question
QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in canonical form. (b) (4 marks) Check the observability of the system. (c) 8 marks) Design a suitable full-order state observer for the system. Explain your choice of the observer's poles. d) (10 marks) Design a PI controller for the system so the output of the...
could you please answer this question
QUESTION 2 Consider a system with an open-loop trans fer function given by Y(s) s+7 U(s) s2 +3s-8 (a) (8 marks) Derive a state-space model for the system in canonical form. (b) (4 marks) Check the observability of the system. (c) 8 marks) Design a suitable full-order state observer for the system. Explain your choice of the observer's poles. d) (10 marks) Design a PI controller for the system so the output of the...
Most questions answered within 3 hours.
-
Please Help ASAP.
1Consider the below code which iterates over a linked
list of n nodes...
asked 13 minutes ago -
Determine the air to fuel ratio of:
Canadian natural gas, with 93.9% methane, 4.2% ethane, 0.3%...
asked 13 minutes ago -
A manufacturer of power tools claims that the average amount of
time required to assemble their...
asked 15 minutes ago -
"electron-withdrawing substituents on carbon encourage back
donation", then on the next page he says that "greater...
asked 27 minutes ago -
On December 31, 2016, the shareholders’ equity section of the
balance sheet of R & L...
asked 35 minutes ago -
16.7
At t=0s a small "upward" (positive y) pulse centered at x = 5.0
m is...
asked 48 minutes ago -
Twitter Users and News: A poll conducted in 2013 found that 52%
of U.S. adult Twitter...
asked 1 hour ago -
How
would I know whether a given amino acid has an ionizable group or
not? please...
asked 1 hour ago -
True or false?
True False The function of the enzyme acyl CoA
synthetase is the ATP-dependent coupling...
asked 1 hour ago -
Nadia Corporation adjusts its debt so that its interest coverage
(EBIT/Interest) remains constant at 3. Nadia’s...
asked 1 hour ago -
In a clinical trial, 20 out of 600 patients taking a
prescription drug complained of flulike...
asked 1 hour ago -
7. How many types of nuclear processes can produce energy? 8.
How many types of radioactive...
asked 1 hour ago